only z motor tries to work
-
@Inno-3D can you show the motor settings? Because I’d expect the results to be much lower.
Ian
-
@droftarts here is a photo of the settings
which are hopefully right.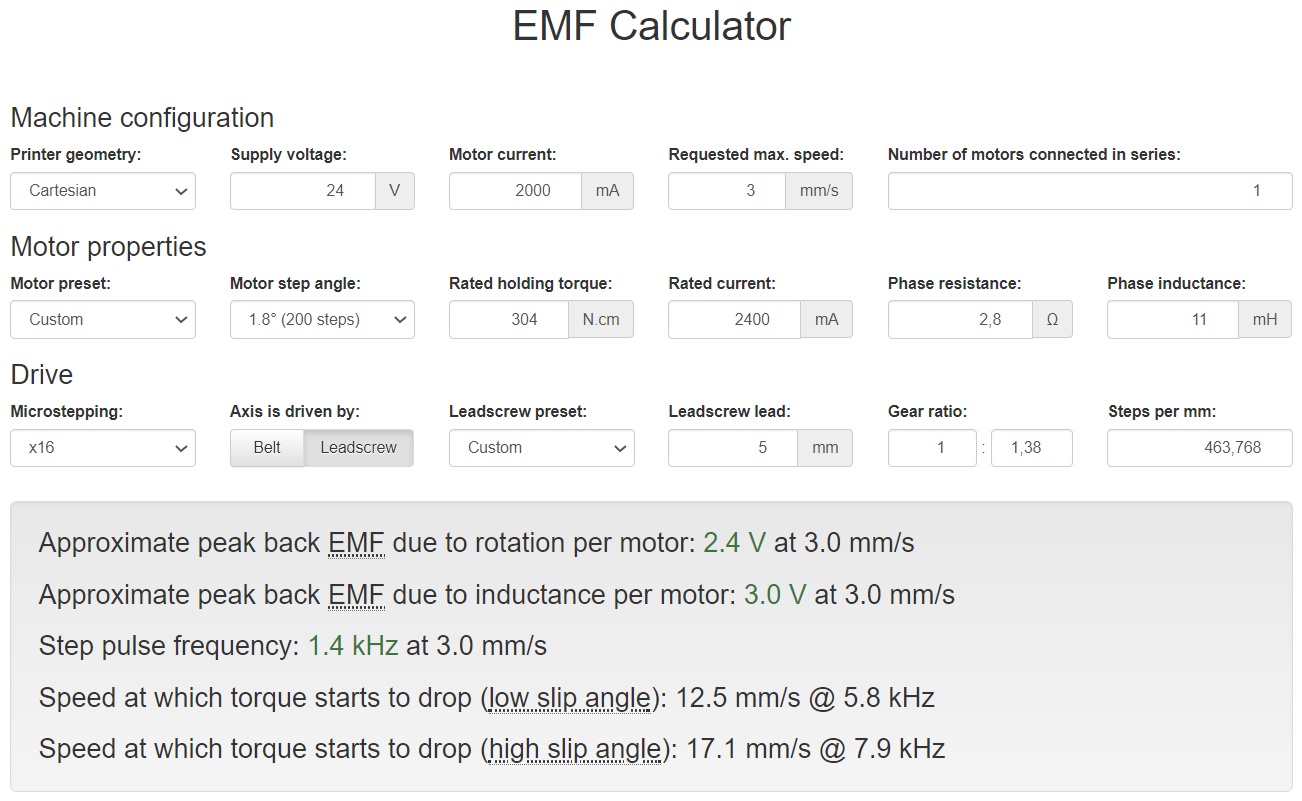
-
@Inno-3D the steps per mm is different from earlier? Which is correct? In reality, what the EMF calculator suggests is usually the absolute maximum. It’s best to set max speed a sensible amount below this.
Ian
-
@droftarts i think that the steps per mm above are correct, because I have used another steps per mm calculator an it said the same one like abobe.
Ok I will test it tomorrow and give feedback
-
@droftarts I changed the steps per mm and I have connected the motors to the right driver. Now It's working better but not corretly.
I tested to home all axis, the the z axis drove a little bit up and than the y axis shortly rotate.
But what is with the x axis? And why does y only shortly rotate? And why doesn't the z axis drive down? Do you know why?
I tested the connection cabel from the x motor and it works
I don't understand it!
Many thanks for your help!!!
-
@Inno-3D said in only z motor tries to work:
And why does y only shortly rotate?
you'd probably need to post your homing files to be able to answer that.
and you have confirmed the endstops are working correctly?
-
-
@Inno-3D please post current config.g, and M122 after trying to home.
Ian
-
My current config.g file:
; Configuration file for Duet WiFi (firmware version 3) ; executed by the firmware on start-up ; ; generated by RepRapFirmware Configuration Tool v3.1.3 on Sun Jul 12 2020 17:24:58 GMT+0200 (Mitteleuropäische Sommerzeit) ; General preferences G90 ; send absolute coordinates... M83 ; ...but relative extruder moves M550 P"Inno 3D" ; set printer name ; Network M551 P"Inno3D" ; set password M552 S1 ; enable network M586 P0 S1 ; enable HTTP M586 P1 S0 ; disable FTP M586 P2 S0 ; disable Telnet ; Drives M569 P0 S1 ; physical drive 0 goes forwards M569 P1 S1 ; physical drive 1 goes forwards M569 P2 S1 ; physical drive 2 goes forwards M569 P3 S1 ; physical drive 3 goes forwards M569 P4 S1 ; physical drive 4 goes forwards M569 P5 S1 ; physical drive 5 goes forwards M569 P6 S1 ; physical drive 6 goes forwards M584 X0 Y1:4 Z2:7:8:9 E3 ; set drive mapping M350 X16 Y16 Z16 E16 I1 ; configure microstepping with interpolation M92 X1104.00 Y883.20 Z883.20 E420.00 ; set steps per mm M566 X900.00 Y900.00 Z12.00 E120.00 ; set maximum instantaneous speed changes (mm/min) M203 X6000.00 Y6000.00 Z180.00 E1200.00 ; set maximum speeds (mm/min) M201 X500.00 Y500.00 Z20.00 E250.00 ; set accelerations (mm/s^2) M906 X2000 Y2000 Z2000 E800 I30 ; set motor currents (mA) and motor idle factor in per cent M84 S30 ; Set idle timeout ; Axis Limits M208 X0 Y0 Z0 S1 ; set axis minima M208 X1500 Y2500 Z1500 S0 ; set axis maxima ; Endstops M574 X2 S1 P"xstop" ; configure active-high endstop for high end on X via pin xstop M574 Y2 S1 P"ystop" ; configure active-high endstop for high end on Y via pin ystop ; Z-Probe M950 S0 C"duex.pwm2" ; create servo pin 0 for BLTouch M558 P9 C"^zprobe.in" H5 F120 T6000 ; set Z probe type to bltouch and the dive height + speeds G31 P500 X0 Y0 Z2.5 ; set Z probe trigger value, offset and trigger height M557 X15:1485 Y15:2485 S20 ; define mesh grid ; Heaters M308 S0 P"bedtemp" Y"thermistor" T100000 B4138 ; configure sensor 0 as thermistor on pin bedtemp M950 H0 C"bedheat" T0 ; create bed heater output on bedheat and map it to sensor 0 M307 H0 B1 S1.00 ; enable bang-bang mode for the bed heater and set PWM limit M140 H0 ; map heated bed to heater 0 M143 H0 S120 ; set temperature limit for heater 0 to 120C M308 S1 P"e0temp" Y"thermistor" T100000 B4138 ; configure sensor 1 as thermistor on pin e0temp M950 H1 C"e0heat" T1 ; create nozzle heater output on e0heat and map it to sensor 1 M307 H1 B0 S1.00 ; disable bang-bang mode for heater and set PWM limit ; Fans M950 F0 C"fan0" Q500 ; create fan 0 on pin fan0 and set its frequency M106 P0 S0 H-1 ; set fan 0 value. Thermostatic control is turned off ; Tools M563 P1 S"FAN" D0 H1 F0 ; define tool 1 G10 P1 X0 Y0 Z0 ; set tool 1 axis offsets G10 P1 R0 S0 ; set initial tool 1 active and standby temperatures to 0C ; Custom settings are not defined ; Miscellaneous M911 S22 R23 P"M913 X0 Y0 G91 M83 G1 Z3 E-5 F1000" ; set voltage thresholds and actions to run on power loss M122
M122 === Diagnostics === RepRapFirmware for Duet 2 WiFi/Ethernet version 2.03 running on Duet WiFi 1.02 or later + DueX5 Board ID: 08DLM-996RU-N8PS0-7JTDG-3SJ6N-TBB7R Used output buffers: 4 of 24 (7 max) === RTOS === Static ram: 25680 Dynamic ram: 94084 of which 0 recycled Exception stack ram used: 348 Never used ram: 10960 Tasks: NETWORK(ready,524) HEAT(blocked,1236) DUEX(suspended,156) MAIN(running,3756) IDLE(ready,160) Owned mutexes: === Platform === Last reset 00:02:56 ago, cause: power up Last software reset at 2020-07-31 11:08, reason: User, spinning module GCodes, available RAM 10960 bytes (slot 0) Software reset code 0x0003 HFSR 0x00000000 CFSR 0x00000000 ICSR 0x0441f000 BFAR 0xe000ed38 SP 0xffffffff Task 0x4e49414d Error status: 0 Free file entries: 10 SD card 0 detected, interface speed: 20.0MBytes/sec SD card longest block write time: 0.0ms, max retries 0 MCU temperature: min 26.7, current 31.9, max 32.0 Supply voltage: min 18.7, current 22.9, max 23.4, under voltage events: 0, over voltage events: 0, power good: yes Driver 0: standstill, SG min/max 0/776 Driver 1: standstill, SG min/max 0/770 Driver 2: standstill, SG min/max not available Driver 3: standstill, SG min/max not available Driver 4: standstill, SG min/max 0/768 Driver 5: standstill, SG min/max not available Driver 6: standstill, SG min/max not available Driver 7: standstill, SG min/max not available Driver 8: standstill, SG min/max not available Driver 9: standstill, SG min/max not available Date/time: 2020-07-31 11:55:50 Cache data hit count 678953335 Slowest loop: 4.24ms; fastest: 0.07ms I2C nak errors 0, send timeouts 0, receive timeouts 0, finishTimeouts 0, resets 0 === Move === Hiccups: 0, FreeDm: 169, MinFreeDm: 167, MaxWait: 160066ms Bed compensation in use: none, comp offset 0.000 === DDARing === Scheduled moves: 5, completed moves: 5, StepErrors: 0, LaErrors: 0, Underruns: 0, 0 === Heat === Bed heaters = 0 -1 -1 -1, chamberHeaters = -1 -1 === GCodes === Segments left: 0 Stack records: 1 allocated, 0 in use Movement lock held by null http is idle in state(s) 0 telnet is idle in state(s) 0 file is idle in state(s) 0 serial is idle in state(s) 0 aux is idle in state(s) 0 daemon is idle in state(s) 0 queue is idle in state(s) 0 autopause is idle in state(s) 0 Code queue is empty. === Network === Slowest loop: 15.44ms; fastest: 0.00ms Responder states: HTTP(0) HTTP(0) HTTP(0) HTTP(0) FTP(0) Telnet(0) Telnet(0) HTTP sessions: 1 of 8 - WiFi - Network state is running WiFi module is connected to access point Failed messages: pending 0, notready 0, noresp 0 WiFi firmware version 1.23 WiFi MAC address ec:fa:bc:5b:45:8f WiFi Vcc 3.37, reset reason Turned on by main processor WiFi flash size 4194304, free heap 25832 WiFi IP address 192.168.178.69 WiFi signal strength -60dBm, reconnections 0, sleep mode modem Socket states: 0 0 0 0 0 0 0 0 -
Your config file is for RRF3, but your installed firmware version is only 2.03.
I would suggest you update your firmware.
First you will need to update to 3.0 and then 3.1.1.
First upload this zip file as is to the /sys folder.
https://github.com/Duet3D/RepRapFirmware/releases/download/3.0/Duet2and3Firmware-3.0.zipThen upload this one.
https://github.com/Duet3D/RepRapFirmware/releases/download/3.1.1/Duet2and3Firmware-3.1.1.zipThen start testing from there.
-
@Phaedrux well spotted!
Ian
-
@Phaedrux yes you are right!
Now it's working!!!
Many thanks for your help guys I'am so happy that it's working now!