Short to ground on drivers 0123
-
Thanks for your patience, DC42 is away right now but I can help.
Looking at your latest M122 report it looks like driver 01 and 1 are damaged. its not completely clear if 2 and 3 are damaged - the motors connected to those ones could have an issue.
Can you try the following please
-
check the wiring of one of your stepper with a voltmeter. they should be wired in two pairs, 1-2 and 3-4 (i.e. pin 1 to 2 should read a few Ohms, pin 3 to 4 should read a few ohms but there should be no connection between pin the pairs).
-
with just that motor you have check tried it plugged into Driver 2, command a movement, send M122 and see what it says, we are looking at this part:
Supply voltage: min 24.0, current 24.1, max 24.1, under voltage events: 0, over voltage events: 0, power good: yes 12V rail voltage: min 12.1, current 12.1, max 12.1, under voltage events: 0 Driver 0: short-to-ground standstill, reads 39652, writes 17 timeouts 0, SG min/max 0/0 Driver 1: short-to-ground standstill, reads 39652, writes 17 timeouts 0, SG min/max 0/63 Driver 2: standstill, reads 39656, writes 14 timeouts 0, SG min/max 0/0 Driver 3: standstill, reads 39656, writes 14 timeouts 0, SG min/max 0/0 Driver 4: standstill, reads 39660, writes 11 timeouts 0, SG min/max 0/0 Driver 5: standstill, reads 39660, writes 11 timeouts 0, SG min/max 0/0- Repeat for driver 3 and driver 4.
Lets see those three excerpts from M122.
-
-
Hello
I tested pairs and got 2ohms on each pair and nothing between the two pairs
For the moves of drivers 3-4 I made z move on the duet panel Due
For the driver 4 , I don't have yet a connected extruder
Error: short-to-ground reported by driver(s) 2
28/07/2020 à 12:31:08 m122
=== Diagnostics ===
RepRapFirmware for Duet 3 MB6HC version 3.1.1 running on Duet 3 MB6HC v1.01 or later (SBC mode)
Board ID: 08DJM-956L2-G43S8-6J9F4-3S46N-TU2QD
Used output buffers: 1 of 40 (10 max)
=== RTOS ===
Static ram: 154604
Dynamic ram: 162592 of which 44 recycled
Exception stack ram used: 376
Never used ram: 75600
Tasks: NETWORK(ready,1968) HEAT(blocked,1200) CanReceiv(suspended,3820) CanSender(suspended,1488) CanClock(blocked,1436) TMC(blocked,196) MAIN(running,4952) IDLE(ready,76)
Owned mutexes:
=== Platform ===
Last reset 00:01:08 ago, cause: power up
Last software reset at 2020-07-27 15:14, reason: User, spinning module LinuxInterface, available RAM 75704 bytes (slot 0)
Software reset code 0x0010 HFSR 0x00000000 CFSR 0x00000000 ICSR 0x0443c000 BFAR 0x00000000 SP 0xffffffff Task MAIN
Error status: 0
MCU temperature: min 20.6, current 29.8, max 29.9
Supply voltage: min 24.0, current 24.0, max 24.1, under voltage events: 0, over voltage events: 0, power good: yes
12V rail voltage: min 12.1, current 12.1, max 12.2, under voltage events: 0
Driver 0: standstill, reads 8684, writes 14 timeouts 0, SG min/max 0/0
Driver 1: standstill, reads 8684, writes 14 timeouts 0, SG min/max 0/0
Driver 2: short-to-ground standstill, reads 8681, writes 17 timeouts 0, SG min/max 0/8
Driver 3: standstill, reads 8685, writes 14 timeouts 0, SG min/max 0/0
Driver 4: standstill, reads 8688, writes 11 timeouts 0, SG min/max 0/0
Driver 5: standstill, reads 8689, writes 11 timeouts 0, SG min/max 0/0Error: short-to-ground reported by driver(s) 2
28/07/2020 à 12:33:42 M122
=== Diagnostics ===
RepRapFirmware for Duet 3 MB6HC version 3.1.1 running on Duet 3 MB6HC v1.01 or later (SBC mode)
Board ID: 08DJM-956L2-G43S8-6J9F4-3S46N-TU2QD
Used output buffers: 1 of 40 (13 max)
=== RTOS ===
Static ram: 154604
Dynamic ram: 162592 of which 44 recycled
Exception stack ram used: 360
Never used ram: 75616
Tasks: NETWORK(ready,1968) HEAT(blocked,1200) CanReceiv(suspended,3820) CanSender(suspended,1488) CanClock(blocked,1460) TMC(blocked,68) MAIN(running,4536) IDLE(ready,76)
Owned mutexes:
=== Platform ===
Last reset 00:01:04 ago, cause: power up
Last software reset at 2020-07-27 15:14, reason: User, spinning module LinuxInterface, available RAM 75704 bytes (slot 0)
Software reset code 0x0010 HFSR 0x00000000 CFSR 0x00000000 ICSR 0x0443c000 BFAR 0x00000000 SP 0xffffffff Task MAIN
Error status: 0
MCU temperature: min 32.1, current 32.5, max 32.6
Supply voltage: min 23.9, current 24.0, max 24.0, under voltage events: 0, over voltage events: 0, power good: yes
12V rail voltage: min 12.1, current 12.1, max 12.2, under voltage events: 0
Driver 0: standstill, reads 56891, writes 0 timeouts 0, SG min/max not available
Driver 1: standstill, reads 56890, writes 0 timeouts 0, SG min/max not available
Driver 2: short-to-ground standstill, reads 56888, writes 2 timeouts 0, SG min/max not available
Driver 3: standstill, reads 56890, writes 0 timeouts 0, SG min/max not available
Driver 4: standstill, reads 56890, writes 0 timeouts 0, SG min/max not available
Driver 5: standstill, reads 56890, writes 0 timeouts 0, SG min/max not available
Date/time: 2020-07-28 11:33:45
Slowest loop: 3.63ms; fastest: 0.21msDriver number 4 : there is no extruder tool message
-
you will need to update your configuration temporarily to use the test motor on driver 3, and then again on driver 4 - use the M584 command in config.g:
(To test driver 3) :
M584 X0.0 Y0.1 Z0.3 E0.2 ; Temporary drive mapping to test driver 3 as Z(To test driver 4) :
M584 X0.0 Y0.1 Z0.4 E0.2 ; Temporary drive mapping to test driver 4 as Z -
This post is deleted! -
@T3P3Tony said in Short to ground on drivers 0123:
M584 X0.0 Y0.1 Z0.3 E0.2 ; Temporary drive mapping to test driver 3 as Z
Driver 3
m122=== Diagnostics ===
RepRapFirmware for Duet 3 MB6HC version 3.1.1 running on Duet 3 MB6HC v1.01 or later (SBC mode)
Board ID: 08DJM-956L2-G43S8-6J9F4-3S46N-TU2QD
Used output buffers: 1 of 40 (10 max)
=== RTOS ===
Static ram: 154604
Dynamic ram: 162592 of which 44 recycled
Exception stack ram used: 368
Never used ram: 75608
Tasks: NETWORK(ready,1968) HEAT(blocked,1200) CanReceiv(suspended,3820) CanSender(suspended,1488) CanClock(blocked,1452) TMC(blocked,204) MAIN(running,4952) IDLE(ready,76)
Owned mutexes:
=== Platform ===
Last reset 00:00:31 ago, cause: software
Last software reset at 2020-07-28 13:51, reason: User, spinning module LinuxInterface, available RAM 75720 bytes (slot 3)
Software reset code 0x0010 HFSR 0x00000000 CFSR 0x00000000 ICSR 0x0444a000 BFAR 0x00000000 SP 0xffffffff Task MAIN
Error status: 0
MCU temperature: min 33.6, current 34.2, max 34.4
Supply voltage: min 24.0, current 24.0, max 24.0, under voltage events: 0, over voltage events: 0, power good: yes
12V rail voltage: min 12.1, current 12.1, max 12.2, under voltage events: 0
Driver 0: standstill, reads 26013, writes 14 timeouts 0, SG min/max 0/0
Driver 1: standstill, reads 26013, writes 14 timeouts 0, SG min/max 0/0
Driver 2: standstill, reads 26013, writes 14 timeouts 0, SG min/max 0/0
Driver 3: short-to-ground standstill, reads 26011, writes 17 timeouts 0, SG min/max 0/8
Driver 4: standstill, reads 26017, writes 11 timeouts 0, SG min/max 0/0
Driver 5: standstill, reads 26018, writes 11 timeouts 0, SG min/max 0/0
Date/time: 2020-07-28 13:52:03
Slowest loop: 4.13ms; fastest: 0.14msDriver 4 MOTOR IS MOVING DURING TEST
Error: short-to-ground reported by driver(s) 4
28/07/2020 à 14:54:51 m122
=== Diagnostics ===
RepRapFirmware for Duet 3 MB6HC version 3.1.1 running on Duet 3 MB6HC v1.01 or later (SBC mode)
Board ID: 08DJM-956L2-G43S8-6J9F4-3S46N-TU2QD
Used output buffers: 1 of 40 (10 max)
=== RTOS ===
Static ram: 154604
Dynamic ram: 162592 of which 44 recycled
Exception stack ram used: 360
Never used ram: 75616
Tasks: NETWORK(ready,1968) HEAT(blocked,1200) CanReceiv(suspended,3820) CanSender(suspended,1488) CanClock(blocked,1436) TMC(blocked,68) MAIN(running,4952) IDLE(ready,76)
Owned mutexes:
=== Platform ===
Last reset 00:00:50 ago, cause: power up
Last software reset at 2020-07-28 13:53, reason: User, spinning module LinuxInterface, available RAM 75608 bytes (slot 0)
Software reset code 0x0010 HFSR 0x00000000 CFSR 0x00000000 ICSR 0x0444a000 BFAR 0x00000000 SP 0xffffffff Task MAIN
Error status: 0
MCU temperature: min 28.3, current 34.6, max 34.7
Supply voltage: min 23.9, current 24.0, max 24.0, under voltage events: 0, over voltage events: 0, power good: yes
12V rail voltage: min 12.1, current 12.1, max 12.2, under voltage events: 0
Driver 0: standstill, reads 53146, writes 14 timeouts 0, SG min/max 0/0
Driver 1: standstill, reads 53146, writes 14 timeouts 0, SG min/max 0/0
Driver 2: standstill, reads 53147, writes 14 timeouts 0, SG min/max 0/0
Driver 3: standstill, reads 53150, writes 11 timeouts 0, SG min/max 0/0
Driver 4: short-to-ground standstill, reads 53145, writes 17 timeouts 0, SG min/max 0/160
Driver 5: standstill, reads 53151, writes 11 timeouts 0, SG min/max 0/0
Date/time: 2020-07-28 13:54:55
Slowest loop: 4.15ms; fastest: 0.13msIt is the first time I see a motor moving on this board
-
@Touchthebitum said in Short to ground on drivers 0123:
Driver 4: short-to-ground standstill, reads 53145, writes 17 timeouts 0, SG min/max 0/160
OK so it looks like drivers 0-3 are damaged, possibly by the moving pins around earlier but hard to say.
That said there is another issue that is causing a working motor to report short to ground (on driver 4). It may be that the damage to the other drivers is effecting them all. DC42 will have a better idea.
Because of that I will authorise a warranty return. please use reference this thread in the warranty form that your reseller (3dware.ch) will ask you to complete for us and be sure to fill out the serial number so we can match this board to this thread.
When you get your new board please triple check the wiring before powering everything up. I was a little concerned to see the tape holding the crimps on - intermittent disconnection of 1 wire of the 4 driver wires can damage the drivers.
-
Ok, thanks for your time and support.
I'll 10x check ;), I want to print")
-
Hello
I got the second Duet 3 and I'm getting mad with this board.
I checked 10 times the phases/continuity on every motor.
Before testing movements I made M122 (usb mode) and everything is ok. All drivers are ok.
I test y movement with my Panel Due movement button and I get "Error: short-to-ground reported by driver(s) 0 1"After that I made M122 and I get this :
m122
=== Diagnostics ===
RepRapFirmware for Duet 3 MB6HC version 3.1.1 running on Duet 3 MB6HC v1.01 or later (SBC mode)
Board ID: 08DJM-956L2-G43S8-6JKD6-3SJ6L-KA02G
Used output buffers: 1 of 40 (10 max)
=== RTOS ===
Static ram: 154604
Dynamic ram: 162592 of which 44 recycled
Exception stack ram used: 200
Never used ram: 75776
Tasks: NETWORK(ready,1968) HEAT(blocked,1232) CanReceiv(suspended,3820) CanSender(suspended,1488) CanClock(blocked,1460) TMC(suspended,252) MAIN(running,5132) IDLE(ready,76)
Owned mutexes:
=== Platform ===
Last reset 00:00:49 ago, cause: power up
Last software reset at 2020-08-02 08:21, reason: User, spinning module LinuxInterface, available RAM 75776 bytes (slot 1)
Software reset code 0x0010 HFSR 0x00000000 CFSR 0x00000000 ICSR 0x0443c000 BFAR 0x00000000 SP 0xffffffff Task MAIN
Error status: 0
MCU temperature: min 20.6, current 28.3, max 28.4
Supply voltage: min 0.2, current 0.2, max 0.3, under voltage events: 0, over voltage events: 0, power good: no
12V rail voltage: min 0.1, current 0.2, max 0.3, under voltage events: 0
Driver 0: ok, reads 0, writes 0 timeouts 0, SG min/max 0/0
Driver 1: ok, reads 0, writes 0 timeouts 0, SG min/max 0/0
Driver 2: ok, reads 0, writes 0 timeouts 0, SG min/max 0/0
Driver 3: ok, reads 0, writes 0 timeouts 0, SG min/max 0/0
Driver 4: ok, reads 0, writes 0 timeouts 0, SG min/max 0/0
Driver 5: ok, reads 0, writes 0 timeouts 0, SG min/max 0/0
Date/time: 2020-08-02 10:44:14
Slowest loop: 2.64ms; fastest: 0.14ms
=== Storage ===
Free file entries: 10
SD card 0 not detected, interface speed: 37.5MBytes/sec
SD card longest read time 0.0ms, write time 0.0ms, max retries 0
=== Move ===
Hiccups: 0(0), FreeDm: 375, MinFreeDm: 375, MaxWait: 0ms
Bed compensation in use: none, comp offset 0.000
=== MainDDARing ===
Scheduled moves: 0, completed moves: 0, StepErrors: 0, LaErrors: 0, Underruns: 0, 0 CDDA state: -1
=== AuxDDARing ===
Scheduled moves: 0, completed moves: 0, StepErrors: 0, LaErrors: 0, Underruns: 0, 0 CDDA state: -1
=== Heat ===
Bed heaters = 0 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1, chamberHeaters = -1 -1 -1 -1
=== GCodes ===
Segments left: 0
Movement lock held by null
HTTP* is ready with "M122" in state(s) 0
Telnet is idle in state(s) 0
File is idle in state(s) 0
USB is idle in state(s) 0
Aux is idle in state(s) 0
Trigger* is idle in state(s) 0
Queue is idle in state(s) 0
LCD is idle in state(s) 0
SBC is idle in state(s) 0
Daemon* is idle in state(s) 0
Aux2 is idle in state(s) 0
Autopause is idle in state(s) 0
Code queue is empty.
=== Network ===
Slowest loop: 0.27ms; fastest: 0.01ms
Responder states: HTTP(0) HTTP(0) HTTP(0) HTTP(0) HTTP(0) HTTP(0) FTP(0) Telnet(0), 0 sessions Telnet(0), 0 sessions
HTTP sessions: 0 of 8- Ethernet -
State: disabled
Error counts: 0 0 0 0 0
Socket states: 0 0 0 0 0 0 0 0
=== CAN ===
Messages sent 104, longest wait 0ms for type 0
=== Linux interface ===
State: 0, failed transfers: 0
Last transfer: 12ms ago
RX/TX seq numbers: 843/844
SPI underruns 0, overruns 0
Number of disconnects: 0
Buffer RX/TX: 0/0-0
=== Duet Control Server ===
Duet Control Server v3.1.1
Code buffer space: 4096
Configured SPI speed: 8000000 Hz
Full transfers per second: 11.04
Please I don't want to blow something.
What am I missing ?
I'm starting to regret my WORKING Duet2 Wifi.
I'm using the SBC mode with a Raspberry 4 8GBHere is my config file built with the online configurator:
; Configuration file for Duet 3 (firmware version 3)
; executed by the firmware on start-up
;
; generated by RepRapFirmware Configuration Tool v3.1.4 on Mon Jul 27 2020 12:20:30 GMT+0200 (heure d’été d’Europe centrale); General preferences
G90 ; send absolute coordinates...
M83 ; ...but relative extruder moves
M550 P"Duet 3" ; set printer name
M669 K1 ; select CoreXY mode; Drives
M569 P0 S1 ; physical drive 0.0 goes forwards
M569 P1 S1 ; physical drive 0.1 goes forwards
M569 P2 S1 ; physical drive 0.2 goes forwards
M569 P3 S1 ; physical drive 0.3 goes forwards
M584 X0.0 Y0.1 Z0.2 E0.3 ; set drive mapping
M350 X16 Y16 Z16 E16 I1 ; configure microstepping with interpolation
M92 X80.00 Y80.00 Z4000.00 E420.00 ; set steps per mm
M566 X900.00 Y900.00 Z12.00 E120.00 ; set maximum instantaneous speed changes (mm/min)
M203 X6000.00 Y6000.00 Z180.00 E1200.00 ; set maximum speeds (mm/min)
M201 X500.00 Y500.00 Z20.00 E250.00 ; set accelerations (mm/s^2)
M906 X800 Y800 Z800 E800 I30 ; set motor currents (mA) and motor idle factor in per cent
M84 S30 ; Set idle timeout; Axis Limits
M208 X0 Y0 Z0 S1 ; set axis minima
M208 X230 Y210 Z500 S0 ; set axis maxima; Endstops
M574 X1 S1 P"io1.in" ; configure active-high endstop for low end on X via pin io1.in
M574 Y2 S1 P"io2.in" ; configure active-high endstop for high end on Y via pin io2.in
M574 Z1 S2 ; configure Z-probe endstop for low end on Z; Z-Probe
M950 S0 C"io7.out" ; create servo pin 0 for BLTouch
M558 P9 C"^io6.in" H5 F120 T6000 ; set Z probe type to bltouch and the dive height + speeds
M558 H30 ;*** Remove this line after delta calibration has been done and new delta parameters have been saved
G31 P500 X0 Y0 Z2.5 ; set Z probe trigger value, offset and trigger height
M557 X15:215 Y15:195 S20 ; define mesh grid; Heaters
M308 S0 P"temp1" Y"thermistor" T100000 B4138 ; configure sensor 0 as thermistor on pin temp1
M950 H0 C"out1" T0 ; create bed heater output on out1 and map it to sensor 0
M307 H0 B0 S1.00 ; disable bang-bang mode for the bed heater and set PWM limit
M140 H0 ; map heated bed to heater 0
M143 H0 S120 ; set temperature limit for heater 0 to 120C
M308 S1 P"temp0" Y"thermistor" T325000 B4138 ; configure sensor 1 as thermistor on pin temp0
M950 H1 C"out0" T1 ; create nozzle heater output on out0 and map it to sensor 1
M307 H1 B0 S1.00 ; disable bang-bang mode for heater and set PWM limit; Fans
M950 F0 C"out4" Q500 ; create fan 0 on pin out4 and set its frequency
M106 P0 S0 H-1 ; set fan 0 value. Thermostatic control is turned off
M950 F1 C"out5" Q500 ; create fan 1 on pin out5 and set its frequency
M106 P1 S1 H1 T200 ; set fan 1 value. Thermostatic control is turned on; Tools
M563 P0 D0 H1 F0 ; define tool 0
G10 P0 X0 Y0 Z0 ; set tool 0 axis offsets
G10 P0 R0 S0 ; set initial tool 0 active and standby temperatures to 0C; Custom settings
M564 H0; Miscellaneous
M575 P1 S1 B57600 ; enable support for PanelDue
M564 H0 - Ethernet -
-
@Touchthebitum said in Short to ground on drivers 0123:
Supply voltage: min 0.2, current 0.2, max 0.3, under voltage events: 0, over voltage events: 0, power good: no
No 12/24V power reported? PSU connected and turned on? Note wiring order for power is the other way around from Duet 2. I see all previous M122 did have 24V. Check fuse.
Otherwise, can you post a picture of your Duet board and wiring, showing where steppers are connected?
Please also post the specs of the motors you are trying to connect.
Do you know what speed the PanelDue buttons are requesting axis movement?
Ian
Bed-slinger - Mini5+ WiFi/1LC | RRP Fisher v1 - D2 WiFi | Polargraph - D2 WiFi | TronXY X5S - 6HC/Roto | CNC router - 6HC | Tractus3D T1250 - D2 Eth
-
@droftarts
Thanks for your reply.
I'm afraid to put current in this board ...
I tried one movement , one time and got short message on drivers ...Here is the last M122 with the PSU on :
m122
=== Diagnostics ===
RepRapFirmware for Duet 3 MB6HC version 3.1.1 running on Duet 3 MB6HC v1.01 or later (SBC mode)
Board ID: 08DJM-956L2-G43S8-6JKD6-3SJ6L-KA02G
Used output buffers: 1 of 40 (10 max)
=== RTOS ===
Static ram: 154604
Dynamic ram: 162592 of which 44 recycled
Exception stack ram used: 272
Never used ram: 75704
Tasks: NETWORK(ready,1968) HEAT(blocked,1200) CanReceiv(suspended,3820) CanSender(suspended,1488) CanClock(blocked,1452) TMC(blocked,192) MAIN(running,4952) IDLE(ready,76)
Owned mutexes:
=== Platform ===
Last reset 00:00:48 ago, cause: power up
Last software reset at 2020-08-02 08:21, reason: User, spinning module LinuxInterface, available RAM 75776 bytes (slot 1)
Software reset code 0x0010 HFSR 0x00000000 CFSR 0x00000000 ICSR 0x0443c000 BFAR 0x00000000 SP 0xffffffff Task MAIN
Error status: 0
MCU temperature: min 17.1, current 25.4, max 25.5
Supply voltage: min 24.1, current 24.1, max 24.2, under voltage events: 0, over voltage events: 0, power good: yes
12V rail voltage: min 12.1, current 12.2, max 12.2, under voltage events: 0
Driver 0: standstill, reads 41634, writes 14 timeouts 0, SG min/max 0/0
Driver 1: standstill, reads 41634, writes 14 timeouts 0, SG min/max 0/0
Driver 2: standstill, reads 41635, writes 14 timeouts 0, SG min/max 0/0
Driver 3: standstill, reads 41635, writes 14 timeouts 0, SG min/max 0/0
Driver 4: standstill, reads 41639, writes 11 timeouts 0, SG min/max 0/0
Driver 5: standstill, reads 41639, writes 11 timeouts 0, SG min/max 0/0
Date/time: 2020-08-02 12:46:46
Slowest loop: 3.86ms; fastest: 0.14ms
=== Storage ===
Free file entries: 10
SD card 0 not detected, interface speed: 37.5MBytes/sec
SD card longest read time 0.0ms, write time 0.0ms, max retries 0
=== Move ===
Hiccups: 0(0), FreeDm: 375, MinFreeDm: 375, MaxWait: 0ms
Bed compensation in use: none, comp offset 0.000
=== MainDDARing ===
Scheduled moves: 0, completed moves: 0, StepErrors: 0, LaErrors: 0, Underruns: 0, 0 CDDA state: -1
=== AuxDDARing ===
Scheduled moves: 0, completed moves: 0, StepErrors: 0, LaErrors: 0, Underruns: 0, 0 CDDA state: -1
=== Heat ===
Bed heaters = 0 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1, chamberHeaters = -1 -1 -1 -1
=== GCodes ===
Segments left: 0
Movement lock held by null
HTTP* is ready with "M122" in state(s) 0
Telnet is idle in state(s) 0
File is idle in state(s) 0
USB is idle in state(s) 0
Aux is idle in state(s) 0
Trigger* is idle in state(s) 0
Queue is idle in state(s) 0
LCD is idle in state(s) 0
SBC is idle in state(s) 0
Daemon* is idle in state(s) 0
Aux2 is idle in state(s) 0
Autopause is idle in state(s) 0
Code queue is empty.
=== Network ===
Slowest loop: 1.39ms; fastest: 0.01ms
Responder states: HTTP(0) HTTP(0) HTTP(0) HTTP(0) HTTP(0) HTTP(0) FTP(0) Telnet(0), 0 sessions Telnet(0), 0 sessions
HTTP sessions: 0 of 8- Ethernet -
State: disabled
Error counts: 0 0 0 0 0
Socket states: 0 0 0 0 0 0 0 0
=== CAN ===
Messages sent 103, longest wait 0ms for type 0
=== Linux interface ===
State: 0, failed transfers: 0
Last transfer: 17ms ago
RX/TX seq numbers: 841/842
SPI underruns 0, overruns 0
Number of disconnects: 0
Buffer RX/TX: 0/0-0
=== Duet Control Server ===
Duet Control Server v3.1.1
Code buffer space: 4096
Configured SPI speed: 8000000 Hz
Full transfers per second: 0.49
Motors are Blurolls 17HM19-2004S and was working on the Duet2 Wifi
I don't know the speed for movements on the Paneldue.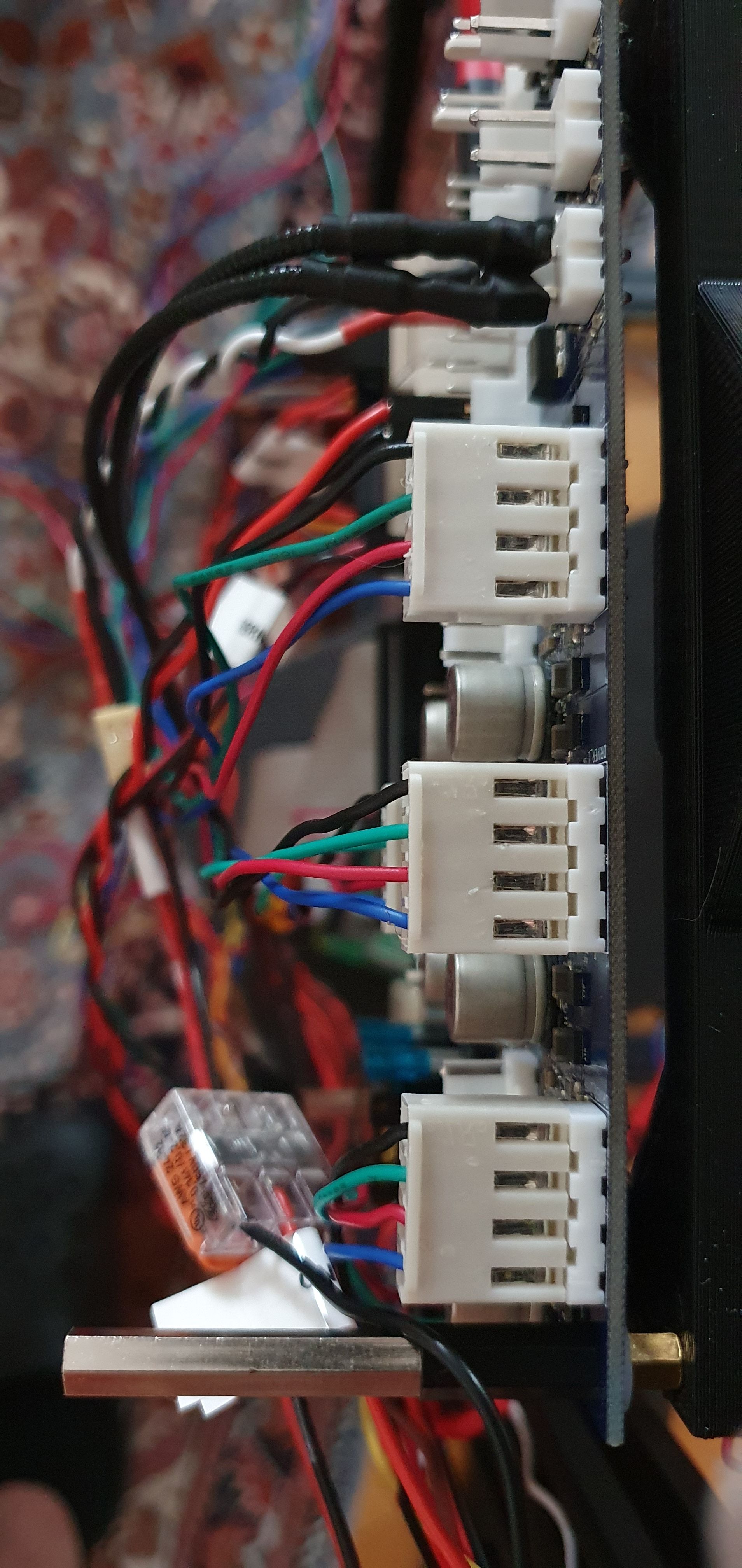
No motor connected , move X and I got this :
Error: short-to-ground reported by driver(s) 0 1
02/08/2020 à 15:04:23 m122
=== Diagnostics ===
RepRapFirmware for Duet 3 MB6HC version 3.1.1 running on Duet 3 MB6HC v1.01 or later (SBC mode)
Board ID: 08DJM-956L2-G43S8-6JKD6-3SJ6L-KA02G
Used output buffers: 1 of 40 (10 max)
=== RTOS ===
Static ram: 154604
Dynamic ram: 162592 of which 44 recycled
Exception stack ram used: 304
Never used ram: 75672
Tasks: NETWORK(ready,1968) HEAT(blocked,1200) CanReceiv(suspended,3820) CanSender(suspended,1488) CanClock(blocked,1436) TMC(blocked,68) MAIN(running,4952) IDLE(ready,76)
Owned mutexes:
=== Platform ===
Last reset 00:00:54 ago, cause: power up
Last software reset at 2020-08-02 08:21, reason: User, spinning module LinuxInterface, available RAM 75776 bytes (slot 1)
Software reset code 0x0010 HFSR 0x00000000 CFSR 0x00000000 ICSR 0x0443c000 BFAR 0x00000000 SP 0xffffffff Task MAIN
Error status: 0
MCU temperature: min 17.0, current 25.5, max 25.6
Supply voltage: min 24.0, current 24.1, max 24.2, under voltage events: 0, over voltage events: 0, power good: yes
12V rail voltage: min 12.1, current 12.2, max 12.2, under voltage events: 0
Driver 0: short-to-ground standstill, reads 3896, writes 17 timeouts 0, SG min/max 0/8
Driver 1: short-to-ground standstill, reads 3896, writes 17 timeouts 0, SG min/max 0/8
Driver 2: standstill, reads 3900, writes 14 timeouts 0, SG min/max 0/0
Driver 3: standstill, reads 3900, writes 14 timeouts 0, SG min/max 0/0
Driver 4: standstill, reads 3904, writes 11 timeouts 0, SG min/max 0/0
Driver 5: standstill, reads 3904, writes 11 timeouts 0, SG min/max 0/0
Date/time: 2020-08-02 14:04:21
Slowest loop: 4.23ms; fastest: 0.14ms
=== Storage ===
Free file entries: 10
SD card 0 not detected, interface speed: 37.5MBytes/sec
SD card longest read time 0.0ms, write time 0.0ms, max retries 0
=== Move ===
Hiccups: 0(0), FreeDm: 375, MinFreeDm: 373, MaxWait: 38119ms
Bed compensation in use: none, comp offset 0.000
=== MainDDARing ===
Scheduled moves: 1, completed moves: 1, StepErrors: 0, LaErrors: 0, Underruns: 0, 0 CDDA state: -1
=== AuxDDARing ===
Scheduled moves: 0, completed moves: 0, StepErrors: 0, LaErrors: 0, Underruns: 0, 0 CDDA state: -1
=== Heat ===
Bed heaters = 0 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1, chamberHeaters = -1 -1 -1 -1
=== GCodes ===
Segments left: 0
Movement lock held by null
HTTP* is ready with "M122" in state(s) 0
Telnet is idle in state(s) 0
File is idle in state(s) 0
USB is idle in state(s) 0
Aux is idle in state(s) 0
Trigger* is idle in state(s) 0
Queue is idle in state(s) 0
LCD is idle in state(s) 0
SBC is idle in state(s) 0
Daemon* is idle in state(s) 0
Aux2 is idle in state(s) 0
Autopause is idle in state(s) 0
Code queue is empty.
=== Network ===
Slowest loop: 1.82ms; fastest: 0.01ms
Responder states: HTTP(0) HTTP(0) HTTP(0) HTTP(0) HTTP(0) HTTP(0) FTP(0) Telnet(0), 0 sessions Telnet(0), 0 sessions
HTTP sessions: 0 of 8- Ethernet -
State: disabled
Error counts: 0 0 0 0 0
Socket states: 0 0 0 0 0 0 0 0
=== CAN ===
Messages sent 127, longest wait 0ms for type 0
=== Linux interface ===
State: 0, failed transfers: 0
Last transfer: 16ms ago
RX/TX seq numbers: 1025/1026
SPI underruns 0, overruns 0
Number of disconnects: 0
Buffer RX/TX: 0/0-0
=== Duet Control Server ===
Duet Control Server v3.1.1
Code buffer space: 4096
Configured SPI speed: 8000000 Hz
Full transfers per second: 0.35
- Ethernet -
-
@Touchthebitum can you try setting up the Duet in standalone mode, and test? Disconnect the RPi, create a fresh SD card, copy over your config. My theory: your RPi is causing the issue, possibly something on the SPI bus. No real evidence for this, just that I think it unlikely (though possible) that you’d have two broken boards in a row.
Ian
Bed-slinger - Mini5+ WiFi/1LC | RRP Fisher v1 - D2 WiFi | Polargraph - D2 WiFi | TronXY X5S - 6HC/Roto | CNC router - 6HC | Tractus3D T1250 - D2 Eth
-
@droftarts
same results ... error on driver 0 and 1
It's a nightmare
I can't post anything since I don't have ethernet connection -
@Touchthebitum said in Short to ground on drivers 0123:
I can't post anything since I don't have ethernet connection
to the board in stand alone mode?
-
@bearer
No, I'm far from a router -
@Touchthebitum said in Short to ground on drivers 0123:
@bearer
No, I'm far from a routeryou can do all the tests over usb serial interface, or a direct (ethernet) connection to your computer with static ip addresses on both duet and computer when duet is in stand alone mode.
-
@bearer
Ok, what do you need as info or tests ? -
@Touchthebitum said in Short to ground on drivers 0123:
what do you need as info or tests ?
i suspect should repeat all the steps you did diagnosing the old board to see if the error persist when using the Duet as a stand alone board.
you could also configure your raspberry pi to be a wifi to ethernet bridge , but imho its easier to set a static up for a direct ethernet connection but all three options would work.
-
@bearer
I have a connected laptop to my board but I don't know ho to connect -
This is perplexing.
- Are there any other connectors in the leads that connect the motors to the Duet? If so, please post a photo of them.
- Please post a photo of the stepper motor wires where they go into the motor.
- Please use your multimeter to check that there is no continuity between any of the motor wires and the body of the motor.
- Use your multimeter to check that with the connectors fitted, the resistance across each phase is as expected (a few ohms, not a short circuit) and there is no continuity between the two motor phases. Your multimeter probes should be able to fit in the slots in the connector shells in order to make contact with the crimp pins inside.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
to set a static IP address on the Duet, you have two options, config.g or USB. Both cases involves
M552 S1 P192.168.1.14as shown in https://duet3d.dozuki.com/Wiki/Gcode#Section_M552_Set_IP_address_enable_disable_network_interfacethen you need to configure the correct network interface for the computer to use an address in the same network range. probably best to ask google how to do this for your operating system and version/language.
if you use the example above for the duet, set the PC to be IP address
192.168.1.15with netmask255.255.255.0and leave the other settings blank or at their defaults.if you have trouble with the computer let us know what operating system/version/language it is and maybe someone can help