BL Touch
-
@Phaedrux Cool beans, I had to run it again as the 501 would not be in place until rebooting takes place it failed. But ill run it again. Ambient room temperature is at 35*C now so it will affect the calibration I dont know if i should change anything.
-
@Phaedrux It keeps failing
-
It succeeded once though didn't it? If you use m500 after it completed successfully once the values would be saved to config-override.g. do you see anything in that file?
-
@Phaedrux I didn't have m501 in my config file. I sent m500 after I put it in but would not work because the printer said that m501 was not in the config file. So I had to reboot it. And now I can't get it to work.
-
Are you allowing the bed to cool right down to room temperature before you start the tuning process? That is essential.
-
@dc42 indeed.
-
@Gost101 M500 saves the results of an autotune (and some other info) to config_override.g in the 'sys' folder on your SD card. An example of config_override.g:
; config-override.g file generated in response to M500 at 2020-09-30 10:19 ; This is a system-generated file - do not edit ; Heater model parameters M307 H0 A215.5 C661.6 D5.8 S1.00 V11.6 B1 M307 H1 A341.8 C144.9 D4.6 S1.00 V12.2 B0 M307 H2 A341.8 C144.9 D4.6 S1.00 V12.2 B0 ; Workplace coordinates G10 L2 P1 X0.00 Y0.00 Z0.00 U0.00 G10 L2 P2 X0.00 Y0.00 Z0.00 U0.00 G10 L2 P3 X0.00 Y0.00 Z0.00 U0.00 G10 L2 P4 X0.00 Y0.00 Z0.00 U0.00 G10 L2 P5 X0.00 Y0.00 Z0.00 U0.00 G10 L2 P6 X0.00 Y0.00 Z0.00 U0.00 G10 L2 P7 X0.00 Y0.00 Z0.00 U0.00 G10 L2 P8 X0.00 Y0.00 Z0.00 U0.00 G10 L2 P9 X0.00 Y0.00 Z0.00 U0.00You can then:
either open config_override.g, copy the
M307 H0 ...line to your config.g, making sure you paste it in after, or in place of, any existing M307 H0 command,or add M501 to the end of your config.g, which causes it to run config_override.g after config.g.
M500 and M501 are well-documented in the gcode dictionary: https://duet3d.dozuki.com/Wiki/Gcode?revisionid=HEAD#Section_M500_Store_parameters
Ian
-
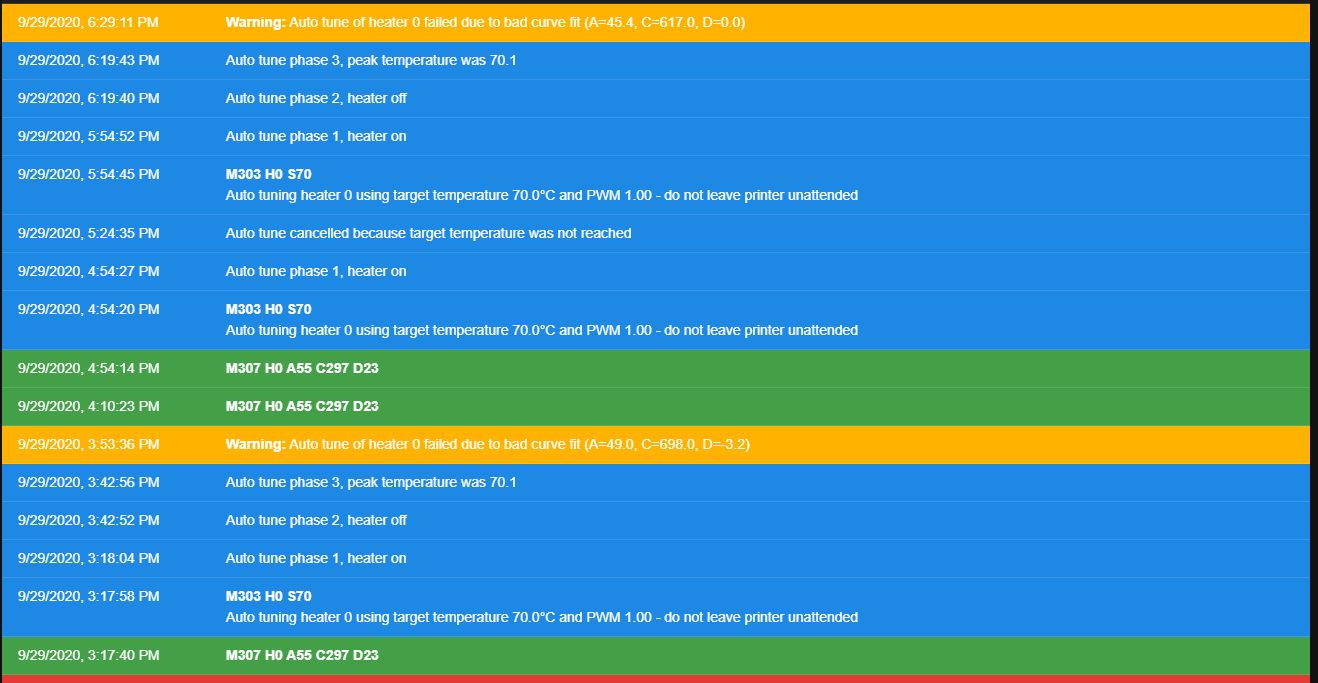
@droftarts Thanks. Also the printer just finished the M303 with another cancelled:
9/30/2020, 3:27:43 AM Auto tune cancelled because target temperature was not reached 9/30/2020, 2:57:35 AM Auto tune phase 1, heater on 9/30/2020, 2:57:29 AM M303 H0 S70 Auto tuning heater 0 using target temperature 70.0°C and PWM 1.00 - do not leave printer unattended 9/30/2020, 2:57:22 AM M307 H0 A55 C297 D23 -
@droftarts Is there a way to ignore the safety's and allow the bed to heat up to 70*C?
-
@Gost101 It's going to be very difficult to tune the bed to the maximum temperature it can achieve, because sometimes it gets there, and sometimes it doesn't. There isn't anyway to disable the heater warning, because that would be unsafe. Try tuning to 60C.
Also, have you changed the thermistor setting in config.g to what they actually are? I've just checked the Creality CR10 S5 Marlin firmware source code. Your bed thermistor should be a 100k EPCOS, and so is your hotend as standard. For the hot end, you linked an E3D heater cartridge, not the thermistor! Are you still using the stock thermistor? If so, it's also a 100k EPCOS thermistor. If they are both standard, change these lines in config.g for (slightly) more accurate temperatures:
M308 S0 P"bedtemp" Y"thermistor" T100000 B4092 ; configure sensor 0 as thermistor on pin bedtemp ... M308 S1 P"e0temp" Y"thermistor" T100000 B4092 ; configure sensor 1 as thermistor on pin e0tempIf you've changed the hot end thermistor, post what it is. Perhaps also post your current config.g.
Ian
-
I'm using this e3D thermistor for the hotend and the stock one for the bed. Granted I need to buy a higher temp one for the hotend. link text

-
@Gost101 Okay, so that's a Semitec 104NT (a drop-in replacement for the discontinued Semitec 104GT). Change config.g to:
M308 S1 P"e0temp" Y"thermistor" T100000 B4725 C7.06e-8 ; configure sensor 1 as thermistor on pin e0tempIan
-
@droftarts Tunning for the bed failed again.
-
@droftarts Is there a way to increase the time before the heater faults for rising to slowly?
-
; Configuration file for Duet WiFi (firmware version 3) ; executed by the firmware on start-up ; ; generated by RepRapFirmware Configuration Tool v3.1.4 on Mon Sep 28 2020 07:45:49 GMT-0600 (Mountain Daylight Time) ; General preferences G90 ; send absolute coordinates... M83 ; ...but relative extruder moves M550 P"A.C.E." ; set printer name M918 P1 E4 F2000000 ; configure direct-connect display ; Network M551 P"SpaceForceHu2020!!" ; set password M552 S1 ; enable network M586 P0 S1 ; enable HTTP M586 P1 S0 ; disable FTP M586 P2 S0 ; disable Telnet ; Drives M569 P0 S1 ; X physical drive 0 goes backwards M569 P1 S1 ; Y physical drive 1 goes backwards M569 P2 S0 ; Z One physical drive 2 goes forwards M569 P2 S0 ; Z One physical drive 2 goes forwards M569 P3 S0 ; E physical drive 3 goes backwards M584 X0 Y1 Z2 E3 ; set drive mapping M350 X16 Y16 Z16 E16 I1 ; configure microstepping with interpolation M92 X80.00 Y80.00 Z400.00 E415.00 ; set steps per mm M566 X1200.00 Y1200.00 Z24.00 E300.00 ; set maximum instantaneous speed changes (mm/min) M203 X9000.00 Y9000.00 Z180.00 E6000.00 ; set maximum speeds (mm/min) M201 X500.00 Y500.00 Z100.00 E5000.00 ; set accelerations (mm/s^2) M906 X800 Y800 Z800 E1000 I50 ; set motor currents (mA) and motor idle factor in per cent M84 S30 ; Set idle timeout ; Axis Limits M208 X0 Y0 Z0 S1 ; set axis minima M208 X500 Y500 Z500 S0 ; set axis maxima ;Filiment Out Sensor M591 D0 P1 C"e0stop" S1 ; filiment out sensor ; Endstops M574 X1 S1 P"xstop" ; configure active-high endstop for low end on X via pin xstop M574 Y1 S1 P"ystop" ; configure active-high endstop for low end on Y via pin ystop M574 Z1 S2 ; configure Z-probe endstop for low end on Z ; Z-Probe M950 S0 C"exp.heater7" ; create servo pin 0 for BLTouch M558 P9 C"^zprobe.in" H5 F600 T9000 ; set Z probe type to bltouch and the dive height + speeds G31 P500 X37 Y0 Z2.150 ; set Z probe trigger value, offset and trigger height M557 X30:470 Y30:470 S25 ; define mesh grid ; Heaters M308 S0 P"bedtemp" Y"thermistor" T100000 B4092 ; configure sensor 0 as thermistor on pin bedtemp M950 H0 C"bedheat" T0 ; create bed heater output on bedheat and map it to sensor 0 M307 H0 A340.0 C140.0 D600 S1.00 V0.0 B1 ; enable bang-bang mode for the bed heater and set PWM limit M140 H0 ; map heated bed to heater 0 M143 H0 S72 ; set temperature limit for heater 0 to 72C M308 S1 P"e0temp" Y"thermistor" T100000 B4725 C7.06e-8 ; configure sensor 1 as thermistor on pin e0temp M950 H1 C"e0heat" T1 ; create nozzle heater output on e0heat and map it to sensor 1 M307 H1 B0 S1.00 ; disable bang-bang mode for heater and set PWM limit ; Fans M950 F0 C"fan0" Q500 ; create fan 0 on pin fan0 and set its frequency M106 P0 S1 H-1 ; set fan 0 value. Thermostatic control is turned off M950 F1 C"fan1" Q500 ; create fan 1 on pin fan1 and set its frequency M106 P1 S1 H1 T45 ; set fan 1 value. Thermostatic control is turned on M950 F2 C"fan2" Q500 ; create fan 2 on pin fan2 and set its frequency M106 P2 S1 H1:0 T45 ; set fan 2 value. Thermostatic control is turned on ; Tools M563 P0 S"Hot end" H1 D0 F1:2 ; define tool 1 G10 P0 X0 Y0 Z0 ; set tool 1 axis offsets G10 P0 R0 S0 ; set initial tool 1 active and standby temperatures to 0C ; Custom settings are not defined ; Miscellaneous M911 S10 R11 P"M913 X0 Y0 G91 M83 G1 Z3 E-5 F1000" ; set voltage thresholds and actions to run on power loss -
@droftarts Is there a way to increase the time before the heater faults for rising to slowly?
From the docs:
If auto tuning fails with a message that the temperature is not rising fast enough, this indicates that either you are using too low a P value in the M303 command, or the dead time in the existing model is much too low for your heater. You can increase the dead time using the M307 command. For example, sending M307 H0 D30 will increase the dead time to 30 seconds. The actual dead time will be known after a successful auto tuning.
Frederick
-
@peter247 @droftarts @fcwilt @Phaedrux @jay_s_uk @dc42 @Veti Everything works now. Here is the files for them: !!Update I'm unable to upload anything to this form for some reason so the code will be here instead!!
Config:; Configuration file for Duet WiFi (firmware version 3) ; executed by the firmware on start-up ; ; generated by RepRapFirmware Configuration Tool v3.1.4 on Mon Sep 28 2020 07:45:49 GMT-0600 (Mountain Daylight Time) ; General preferences G90 ; send absolute coordinates... M83 ; ...but relative extruder moves M550 P"A.C.E." ; set printer name M918 P1 E4 F2000000 ; configure direct-connect display ; Network M551 P"SpaceForceHu2020!!" ; set password M552 S1 ; enable network M586 P0 S1 ; enable HTTP M586 P1 S0 ; disable FTP M586 P2 S0 ; disable Telnet ; Drives M569 P0 S1 ; X physical drive 0 goes backwards M569 P1 S1 ; Y physical drive 1 goes backwards M569 P2 S0 ; Z One physical drive 2 goes forwards M569 P2 S0 ; Z One physical drive 2 goes forwards M569 P3 S0 ; E physical drive 3 goes backwards M584 X0 Y1 Z2 E3 ; set drive mapping M350 X16 Y16 Z16 E16 I1 ; configure microstepping with interpolation M92 X80.00 Y80.00 Z400.00 E415.00 ; set steps per mm M566 X1200.00 Y1200.00 Z24.00 E300.00 ; set maximum instantaneous speed changes (mm/min) M203 X9000.00 Y9000.00 Z180.00 E6000.00 ; set maximum speeds (mm/min) M201 X500.00 Y500.00 Z100.00 E5000.00 ; set accelerations (mm/s^2) M906 X800 Y1200 Z800 E1000 I50 ; set motor currents (mA) and motor idle factor in per cent M84 S30 ; Set idle timeout ; Axis Limits M208 X0 Y0 Z0 S1 ; set axis minima M208 X500 Y500 Z500 S0 ; set axis maxima ;Filiment Out Sensor M591 D0 P1 C"e0stop" S1 ; filiment out sensor ; Endstops M574 X1 S1 P"xstop" ; configure active-high endstop for low end on X via pin xstop M574 Y1 S1 P"ystop" ; configure active-high endstop for low end on Y via pin ystop M574 Z1 S2 ; configure Z-probe endstop for low end on Z ; Z-Probe M950 S0 C"exp.heater7" ; create servo pin 0 for BLTouch M558 P9 C"^zprobe.in" H5 F600 T9000 ; set Z probe type to bltouch and the dive height + speeds G31 P500 X37 Y0 Z2.150 ; set Z probe trigger value, offset and trigger height M557 X30:470 Y30:470 S25 ; define mesh grid ; Heaters M308 S0 P"bedtemp" Y"thermistor" T100000 B4092 ; configure sensor 0 as thermistor on pin bedtemp M950 H0 C"bedheat" T0 ; create bed heater output on bedheat and map it to sensor 0 M307 H0 A340.0 C140.0 D600 S1.00 B1 ; enable bang-bang mode for the bed heater and set PWM limit M140 H0 ; map heated bed to heater 0 M143 H0 S72 ; set temperature limit for heater 0 to 72C M308 S1 P"e0temp" Y"thermistor" T100000 B4725 C7.06e-8 ; configure sensor 1 as thermistor on pin e0temp M950 H1 C"e0heat" T1 ; create nozzle heater output on e0heat and map it to sensor 1 M307 H1 B0 S1.00 ; disable bang-bang mode for heater and set PWM limit ; Fans M950 F0 C"fan0" Q500 ; create fan 0 on pin fan0 and set its frequency M106 P0 S1 H-1 ; set fan 0 value. Thermostatic control is turned off M950 F1 C"fan1" Q500 ; create fan 1 on pin fan1 and set its frequency M106 P1 S1 H1 T45 ; set fan 1 value. Thermostatic control is turned on M950 F2 C"fan2" Q500 ; create fan 2 on pin fan2 and set its frequency M106 P2 S1 H1:0 T45 ; set fan 2 value. Thermostatic control is turned on ; Tools M563 P0 S"Hot end" H1 D0 F1:2 ; define tool 1 G10 P0 X0 Y0 Z0 ; set tool 1 axis offsets G10 P0 R0 S0 ; set initial tool 1 active and standby temperatures to 0C ; Custom settings are not defined ; Miscellaneous M911 S10 R11 P"M913 X0 Y0 G91 M83 G1 Z3 E-5 F1000" ; set voltage thresholds and actions to run on power lossbed:
 code_texthome all:
; homeall.g ; called to home all axes ; ; generated by RepRapFirmware Configuration Tool v3.1.4 on Mon Sep 28 2020 07:45:49 GMT-0600 (Mountain Daylight Time) G91 ; relative positioning G1 H2 Z5 F9000 ; lift Z relative to current position G1 H1 X-505 Y-505 F21600 ; move quickly to X and Y axis endstops and stop there (first pass) G1 H2 X5 Y5 F9000 ; go back a few mm G1 H1 X-505 Y-505 F7200 ; move slowly to X and Y axis endstops once more (second pass) G90 ; absolute positioning G1 X250 Y250 F9000 ; go to first bed probe point and home Z G30 ; home Z by probing the bed G1 Z10 ; raise Z 10mm ; Uncomment the following lines to lift Z after probing ;G91 ; relative positioning ;G1 Z5 F150 ; lift Z relative to current position ;G90 ; absolute positioninghome z:
; homez.g ; called to home the Z axis ; ; generated by RepRapFirmware Configuration Tool v3.1.4 on Mon Sep 28 2020 07:45:49 GMT-0600 (Mountain Daylight Time) G91 ; relative positioning G1 H2 Z5 F9000 ; lift Z relative to current position G90 ; absolute positioning G1 X15 Y15 F9000 ; go to first probe point G30 ; home Z by probing the bed ; Uncomment the following lines to lift Z after probing ;G91 ; relative positioning ;G1 Z5 F150 ; lift Z relative to current position ;G90 ; absolute positioninghome x:
; homex.g ; called to home the X axis ; ; generated by RepRapFirmware Configuration Tool v3.1.4 on Mon Sep 28 2020 07:45:49 GMT-0600 (Mountain Daylight Time) G91 ; relative positioning G1 H2 Z5 F9000 ; lift Z relative to current position G1 H1 X-505 F21600 ; move quickly to X axis endstop and stop there (first pass) G1 H2 X5 F9000 ; go back a few mm G1 H1 X-505 F7200 ; move slowly to X axis endstop once more (second pass) G1 H2 Z-5 F9000 ; lower Z again G90 ; absolute positioninghome y:
; homey.g ; called to home the Y axis ; ; generated by RepRapFirmware Configuration Tool v3.1.4 on Mon Sep 28 2020 07:45:49 GMT-0600 (Mountain Daylight Time) G91 ; relative positioning G1 H2 Z5 F9000 ; lift Z relative to current position G1 H1 Y-505 F21600 ; move quickly to Y axis endstop and stop there (first pass) G1 H2 Y5 F9000 ; go back a few mm G1 H1 Y-505 F7200 ; move slowly to Y axis endstop once more (second pass) G1 H2 Z-5 F9000 ; lower Z again G90 ; absolute positioningTime to break it more lol. I'm now trying to use both z axis independent of each other to calibrate them with a BL Tocuh.
I have read this: Bed levelling using multiple independent Z motors and the following code is what I have created for it. However the printer will home all as it would before. How do I level each axis via the BL Touch not only as part of Home All & Home Z but also as just a macro to level it.
config:; Configuration file for Duet WiFi (firmware version 3) ; executed by the firmware on start-up ; ; generated by RepRapFirmware Configuration Tool v3.1.4 on Mon Sep 28 2020 07:45:49 GMT-0600 (Mountain Daylight Time) ; General preferences G90 ; send absolute coordinates... M83 ; ...but relative extruder moves M550 P"A.C.E." ; set printer name M918 P1 E4 F2000000 ; configure direct-connect display ; Network M551 P"SpaceForceHu2020!!" ; set password M552 S1 ; enable network M586 P0 S1 ; enable HTTP M586 P1 S0 ; disable FTP M586 P2 S0 ; disable Telnet ; Drives M569 P0 S1 ; X physical drive 0 goes backwards M569 P1 S1 ; Y physical drive 1 goes backwards M569 P2 S0 ; Z One physical drive 2 goes forwards M569 P3 S0 ; E physical drive 3 goes backwards M569 P4 S0 ; Z Two physical drive 2 goes forwards M584 X0 Y1 Z2:4 E3 ; set drive mapping M671 X-23:523. Y0:0 S0.5; M350 X16 Y16 Z16 E16 I1 ; configure microstepping with interpolation M92 X80.00 Y80.00 Z400.00 E415.00 ; set steps per mm M566 X1200.00 Y1200.00 Z24.00 E300.00 ; set maximum instantaneous speed changes (mm/min) M203 X9000.00 Y9000.00 Z180.00 E6000.00 ; set maximum speeds (mm/min) M201 X500.00 Y500.00 Z100.00 E5000.00 ; set accelerations (mm/s^2) M906 X800 Y1200 Z800 E1000 I50 ; set motor currents (mA) and motor idle factor in per cent M84 S30 ; Set idle timeout ; Axis Limits M208 X30:470 Y0:250 ; X carriage moves from 30 to 470, Y bed goes from 0 to 250 M208 X0 Y0 Z0 S1 ; set axis minima M208 X500 Y500 Z500 S0 ; set axis maxima ;Filiment Out Sensor M591 D0 P1 C"e0stop" S1 ; filiment out sensor ; Endstops M574 X1 S1 P"xstop" ; configure active-high endstop for low end on X via pin xstop M574 Y1 S1 P"ystop" ; configure active-high endstop for low end on Y via pin ystop M574 Z1 S2 ; configure Z-probe endstop for low end on Z ; Z-Probe M950 S0 C"exp.heater7" ; create servo pin 0 for BLTouch M558 P9 C"^zprobe.in" H5 F600 T9000 ; set Z probe type to bltouch and the dive height + speeds G31 P500 X37 Y0 Z2.150 ; set Z probe trigger value, offset and trigger height M557 X30:470 Y30:470 S25 ; define mesh grid ; Heaters M308 S0 P"bedtemp" Y"thermistor" T100000 B4092 ; configure sensor 0 as thermistor on pin bedtemp M950 H0 C"bedheat" T0 ; create bed heater output on bedheat and map it to sensor 0 M307 H0 A340.0 C140.0 D600 S1.00 B1 ; enable bang-bang mode for the bed heater and set PWM limit M140 H0 ; map heated bed to heater 0 M143 H0 S72 ; set temperature limit for heater 0 to 72C M308 S1 P"e0temp" Y"thermistor" T100000 B4725 C7.06e-8 ; configure sensor 1 as thermistor on pin e0temp M950 H1 C"e0heat" T1 ; create nozzle heater output on e0heat and map it to sensor 1 M307 H1 B0 S1.00 ; disable bang-bang mode for heater and set PWM limit ; Fans M950 F0 C"fan0" Q500 ; create fan 0 on pin fan0 and set its frequency M106 P0 S1 H-1 ; set fan 0 value. Thermostatic control is turned off M950 F1 C"fan1" Q500 ; create fan 1 on pin fan1 and set its frequency M106 P1 S1 H1 T45 ; set fan 1 value. Thermostatic control is turned on M950 F2 C"fan2" Q500 ; create fan 2 on pin fan2 and set its frequency M106 P2 S1 H1:0 T45 ; set fan 2 value. Thermostatic control is turned on ; Tools M563 P0 S"Hot end" H1 D0 F1:2 ; define tool 1 G10 P0 X0 Y0 Z0 ; set tool 1 axis offsets G10 P0 R0 S0 ; set initial tool 1 active and standby temperatures to 0C ; Custom settings are not defined ; Miscellaneous M911 S10 R11 P"M913 X0 Y0 G91 M83 G1 Z3 E-5 F1000" ; set voltage thresholds and actions to run on power lossbed:
; bed.g ; called to perform automatic bed compensation via G32 ; ; generated by RepRapFirmware Configuration Tool v3.1.4 on Mon Sep 28 2020 07:45:49 GMT-0600 (Mountain Daylight Time) M561 ; clear any bed transform G29 ; probe the bed and enable compensation G30 P0 X30 Y250 Z-505 ; probe near a leadscrew, half way along Y axis G30 P1 X470 Y250 Z-505 S2 ; probe near a leadscrew and calibrate 2 motorsI've read older topic on this. The z axis lead screws are located at about -23 and 530. However if a leveling is performed it would be best to do it at 30 and 470 while the bed is centered at 250.
-
Hi,
Going from the docs I think you want to remove the G29 and add a G28.
On my printer, instead of using homing, I just set the Z=0 datum using G1 to move to the center of the bed and G30 to probe.
Frederick
-
@fcwilt tried what you said didn't do what it was supposed to do. I think there is a lot more code that is involved in this.
-
@fcwilt tried what you said didn't do what it was supposed to do. I think there is a lot more code that is involved in this.
Hi,
Here is my bed.g:
M98 P"probez.g" ; set Z=0 datum (see below) ; specify where bed leveling adjustment screws are located M671 X-160:-160:160 Y-160:160:0 ; positions for adjusting screws 1,2,3 ; probe near each adjusting screw and compute results G30 P2 X-140 Y-140 Z-99999 ; probe near an adjusting screw #1 G30 P0 X-140 Y140 Z-99999 ; probe near an adjusting screw #2 G30 P1 X140 Y0 Z-99999 S3; probe near an adjusting screw #3 and compute resultsHere is my probez.g:
M950 S0 C"duex.pwm5" ; create servo pin 0 for BLTouch M558 P9 C"^zprobe.in" H2 F120 T12000 R0.2 A5 S0.01 ; set type for BLtouch and set parameters G31 P25 X0 Y24.5 Z2.500 ; set trigger value, offset and trigger height (larger = closer) G29 S2 ; cancel mesh bed compensation M290 R0 S0 ; cancel baby stepping G1 X0 Y-24.5 ; position for probing G30 ; do single probe - sets Z to probe trigger height