New to the duet COMPLETE NEWBIE
-
@Phaedrux
yes. Z is still triggered .

-
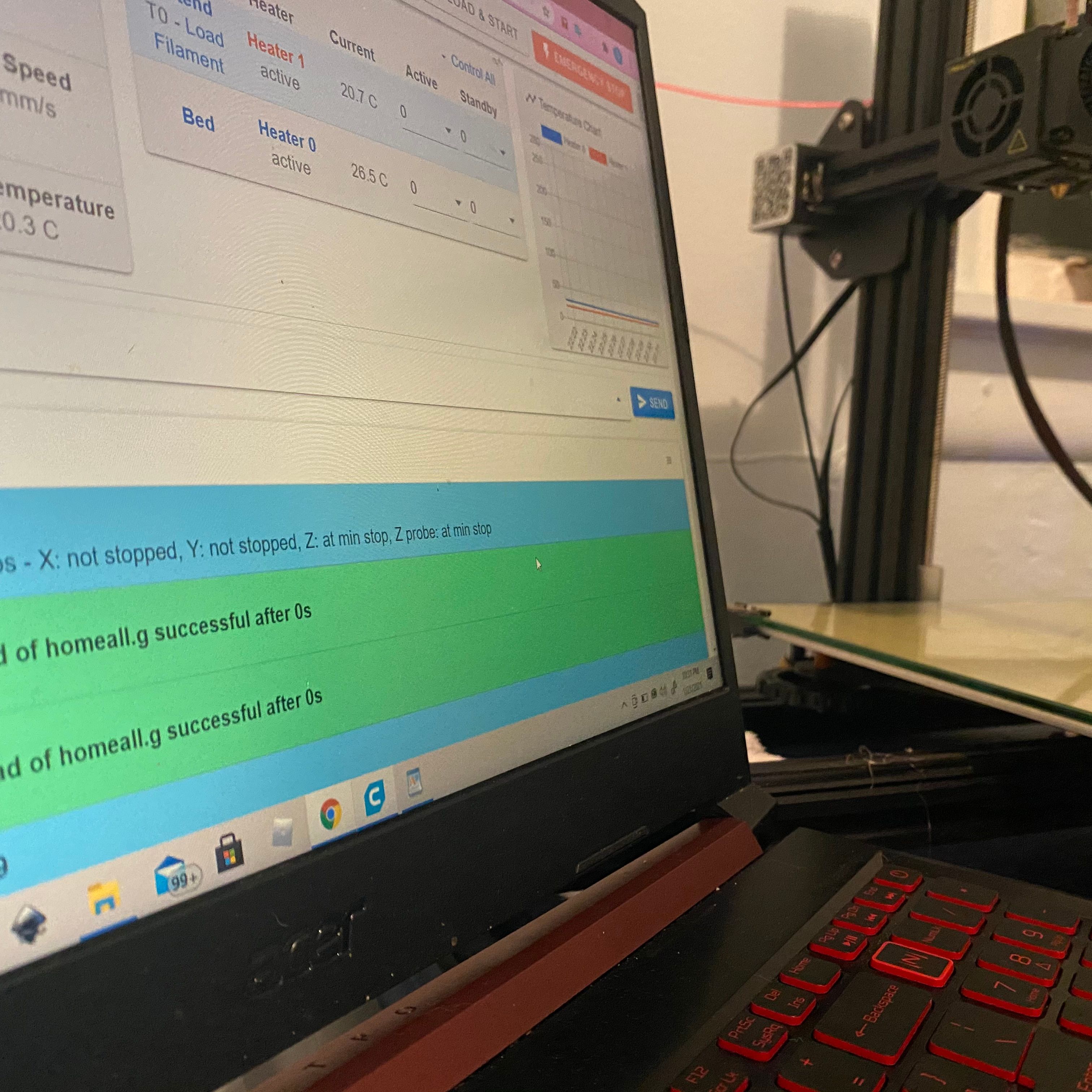
Endstops - X: not stopped, Y: at min stop, Z: at min stop, Z probe: at min stop
Y is triggered but Z is not at the moment and it still reads as "triggered". .
-
@Phaedrux They are all moving correctly . im about to move it to the center to see if its still triggered. .
m119
Endstops - X: not stopped, Y: not stopped, Z: not stopped, Z probe: at min stopYAYYYYYY
-
@Phaedrux
1/21/2021, 5:04:08 PM G28
Error: G0/G1: insufficient axes homedDoes this mean i have to home them all individually at this point?
G1 (H1) Z18 F480000 ; lift Z relative to current position
would this work? -
@gabrealek said in New to the duet COMPLETE NEWBIE:
So just the first H2 right?
Nope, just the one for the XY axis move.
G1 H2 X5 Y5 F480000 ; go back a few mm -
@Phaedrux So do i change the value for F480000?
As in go back a few MM i took it down toG91 ; relative positioning
G1 Z18 F480000 ; lift Z relative to current position
G1 H1 X-300 Y-300 F3000 ; move quickly to X and Y axis endstops and stop there (first pass)
G1 H2 X5 Y5 F480000 ; go back a few mm
G1 H1 X-300 Y-300 F3600 ; move slowly to X and Y axis endstops once more (second pass)
G1 H1 Z-400 F3600 ; move Z down stopping at the endstop
G90 ; absolute positioning
G92 Z0 ; set Z position to axis minimum (you may want to adjust this)So now when i try to homeall i cannot, it gives me
G28
Error: G0/G1: insufficient axes homedSo now its
G91 ; relative positioning
G1 Z18 F480000 ; lift Z relative to current position
G1 H1 X-300 Y-300 F3000 ; move quickly to X and Y axis endstops and stop there (first pass)
G1 X5 Y5 F480000 ; go back a few mm
G1 H1 X-300 Y-300 F3600 ; move slowly to X and Y axis endstops once more (second pass)
G1 H1 Z-400 F3600 ; move Z down stopping at the endstop
G90 ; absolute positioning
G92 Z0 ; set Z position to axis minimum (you may want to adjust this) -
@gabrealek said in New to the duet COMPLETE NEWBIE:
I think this should work. Since you have a Z end stop you can start by homing Z.
My printers don't allow for homing X and Y at the same time - so I don't even know if it is possible. If not just do them one axis at a time.
Add/Adjust F params as desired.
JOOC where did the 480,000 value come from? That is rather fast.
G91 G1 H1 Z-400 F3000 G92 Z0 ; change Z0 to match the actual Z co-ordinate at which the Z end stop triggers G1 Z10 G1 H1 X-300 Y-300 G1 X5 Y5 G1 H1 X-6 Y-6 F300 G90 Frederick
-
@fcwilt they were generated with the config tool . . what should it be set to?
-
@gabrealek said in New to the duet COMPLETE NEWBIE:
G91 ; relative positioning
G1 Z18 F480000 ; lift Z relative to current position
G1 H1 X-300 Y-300 F3000 ; move quickly to X and Y axis endstops and stop there (first pass)
G1 H2 X5 Y5 F480000 ; go back a few mm
G1 H1 X-300 Y-300 F3600 ; move slowly to X and Y axis endstops once more (second pass)
G1 H1 Z-400 F3600 ; move Z down stopping at the endstop
G90 ; absolute positioningThe reason for the error is because you've taken the H2 off of the Z move at the start and end. Those were ok. I just wanted you to remove it from the XY move in the middle.
This would work, but @fcwilt provided a better option anyway that homes the Z axis first.
G91 ; relative positioning G1 H2 Z18 F6000 ; lift Z relative to current position G1 H1 X-300 Y-300 F3000 ; move quickly to X and Y axis endstops and stop there (first pass) G1 X5 Y5 F6000 ; go back a few mm G1 H1 X-300 Y-300 F3600 ; move slowly to X and Y axis endstops once more (second pass) G1 H1 Z-400 F3600 ; move Z down stopping at the endstop G1 Z5 ; back off G1 H1 Z-400 F600 ; home z again slowly G90 ; absolute positioning F480000 is 8000mm/s which is really fast. But it wouldn't actually be able to use that speed because the max speed limit set in config.g is 6000mm/min which is a good cruising around speed (100mm/s)
-
@Phaedrux Okay.
With both of them my z wont go any lower than the middle. i cant get close to the bed at all . . -
If you send just
G1 H1 Z-400 F600in the console does it move the z axis down to the endstop or does it just sit there and change the z axis position to 0? -
@Phaedrux said in New to the duet COMPLETE NEWBIE:
G1 H1 Z-400 F600
It just sits there. when i press home z it goes higher. when i try to bring it back down it does nothing.
-
@Phaedrux
; homeall.g
; called to home all axes
;
; generated by RepRapFirmware Configuration Tool v3.2.1 on Tue Jan 19 2021 17:33:25 GMT-0500 (Eastern Standard Time)G91 ; relative positioning
G1 H2 Z18 F6000 ; lift Z relative to current position
G1 H1 X-300 Y-300 F3000 ; move quickly to X and Y axis endstops and stop there (first pass)
G1 X5 Y5 F6000 ; go back a few mm
G1 H1 X-300 Y-300 F3600 ; move slowly to X and Y axis endstops once more (second pass)
G1 H1 Z-400 F3600 ; move Z down stopping at the endstop
G1 Z5 ; back off
G1 H1 Z-400 F600 ; home z again slowly
G90 ; absolute positioning; homez.g
; called to home the Z axis
;
; generated by RepRapFirmware Configuration Tool v3.2.1 on Tue Jan 19 2021 17:33:25 GMT-0500 (Eastern Standard Time)
G91 ; relative positioning
G1 H2 Z18 F6000 ; lift Z relative to current position
G1 H1 Z-405 F6000 ; move Z down until the endstop is triggered
G92 Z0 ; set Z position to axis minimum (you may want to adjust this)
; set Z position to axis minimum (you may want to adjust this) -
And does it set the current position to Z0?
Check M119 again please. It sounds like the endstop is already triggered at the start, so it won't move any further.
-
@Phaedrux said in New to the duet COMPLETE NEWBIE:
M119
M119
Endstops - X: not stopped, Y: not stopped, Z: at min stop, Z probe: at min stop -
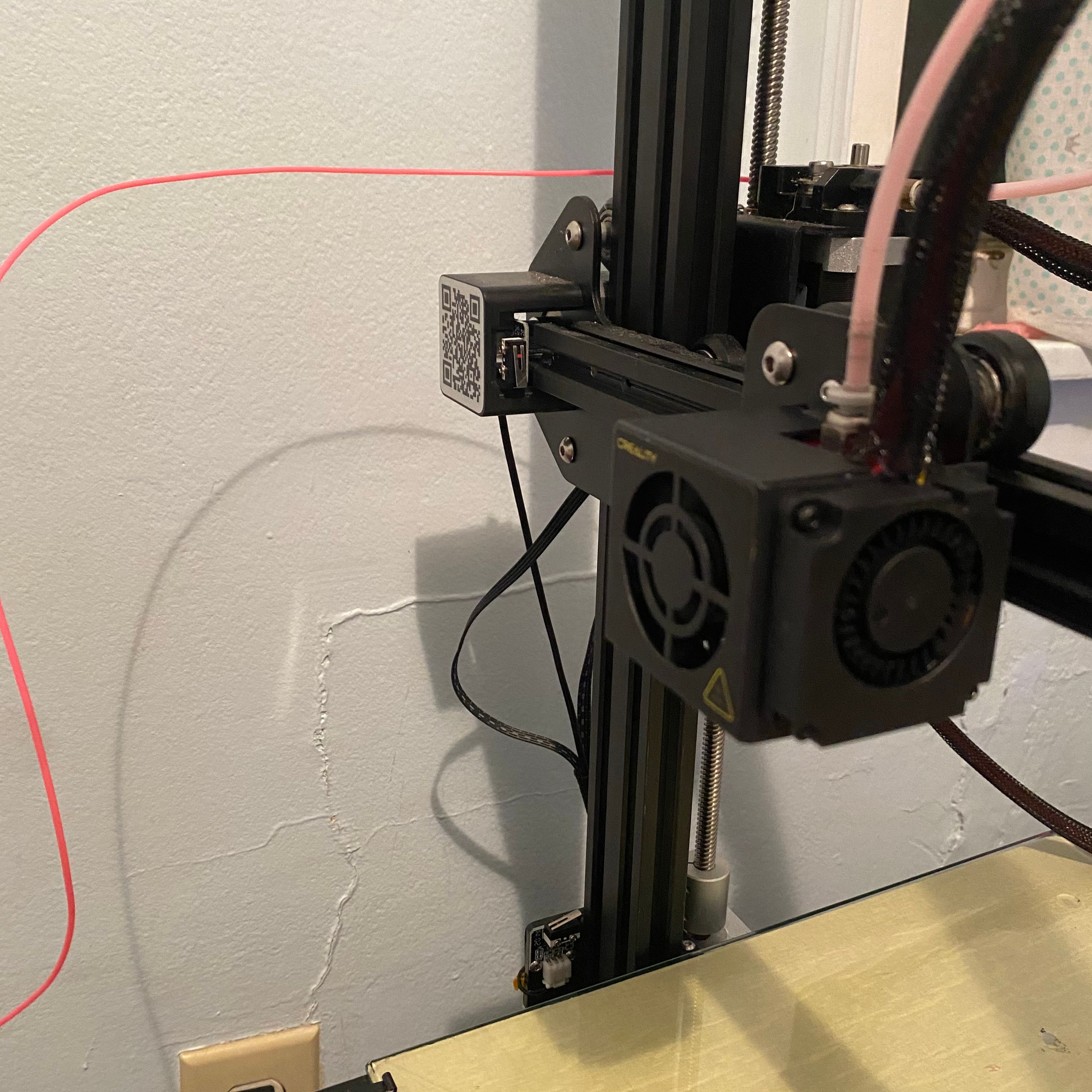
And just to be clear, when you sent M119 the z endstop wasn't actually pressed, right?
Quick photo of the z endstop?Maybe you DO need the
!to invert the Z endstop? -
-
@Phaedrux I inverted it and it went down so far it cracked the glass .
-
@gabrealek said in New to the duet COMPLETE NEWBIE:
@Phaedrux I inverted it and it went down so far it cracked the glass .
When configuring a printer for the first time you need to take certain precautions.
For instance you can trigger an end stop switch by hand to verify that it stops the movement of the axis when it should.
In this case you would start from far the bed, being homing, hit the end stop switch and confirm movement stops.
If it didn't you can kill power before something breaks - like you piece of glass.
Also you can force very slow speeds by editing your M203 command to something like
M203 X500 Y500 Z500
which gives you more time to observe and react if something starts to go wrong.
Did you use my homing code?
We can get things working - just take it one step at a time.
Frederick
-
@fcwilt yes . . I did use the homing code .. the way my setup is right now i have to reach around to kill the power. . im going to to change things once i print some supports for the new things . . Thank you. I appreciate your help. Im going to post all of my homes to see if you can find anything. . At this point im staring at the computer . . kind of scared to turn it back on . . I may need to take a break.
; Configuration file for Duet WiFi (firmware version 3)
; executed by the firmware on start-up
;
; generated by RepRapFirmware Configuration Tool v3.2.1 on Tue Jan 19 2021 17:33:25 GMT-0500 (Eastern Standard Time); General preferences
G90 ; send absolute coordinates...
M83 ; ...but relative extruder moves
M550 P"Creola" ; set printer name; Network
M552 S1 ; enable network
M586 P0 S1 ; enable HTTP
M586 P1 S0 ; disable FTP
M586 P2 S0 ; disable Telnet; Drives
M569 P0 S0 ; physical drive 0 goes backwards
M569 P1 S0 ; physical drive 1 goes backwards
M569 P2 S1 ; physical drive 2 goes forwards
M569 P3 S0 ; physical drive 3 goes backwards
M584 X0 Y1 Z2 E3 ; set drive mapping
M350 X16 Y16 Z16 E16 I1 ; configure microstepping with interpolation
M92 X80.00 Y80.00 Z400.00 E97.08 ; set steps per mm
M566 X900.00 Y900.00 Z60.00 E120.00 ; set maximum instantaneous speed changes (mm/min)
M203 X6000.00 Y6000.00 Z600.00 E1200.00 ; set maximum speeds (mm/min)
M201 X500.00 Y500.00 Z120.00 E250.00 ; set accelerations (mm/s^2)
M906 X800 Y800 Z800 E800 I30 ; set motor currents (mA) and motor idle factor in per cent
M84 S30 ; Set idle timeout; Axis Limits
M208 X0 Y0 Z0 S1 ; set axis minima
M208 X300 Y300 Z400 S0 ; set axis maxima; Endstops
M574 X1 S1 P"xstop" ; configure active-high endstop for low end on X via pin xstop
M574 Y1 S1 P"ystop" ; configure active-high endstop for low end on Y via pin ystop
M574 Z1 S1 P"!zstop" ; configure active-high endstop for low end on Z via pin !zstop; Z-Probe
M558 P0 H18 F120 T480000 ; disable Z probe but set dive height, probe speed and travel speed
M557 X10:220 Y10:220 S20 ; define mesh grid; Heaters
M308 S0 P"bedtemp" Y"thermistor" T98801 B4185 ; configure sensor 0 as thermistor on pin e0temp
M950 H0 C"bedheat" T0 ; create bed heater output on e0heat and map it to sensor 0
M307 H0 B0 S1.00 ; disable bang-bang mode for the bed heater and set PWM limit
M140 H0 ; map heated bed to heater 0
M143 H0 S80 ; set temperature limit for heater 0 to 80C
M308 S1 P"e1temp" Y"thermistor" T98801 B4185 ; configure sensor 1 as thermistor on pin e1temp
M950 H1 C"e1heat" T1 ; create nozzle heater output on e1heat and map it to sensor 1
M307 H1 B0 S1.00 ; disable bang-bang mode for heater and set PWM limit
M143 H1 S280 ; set temperature limit for heater 1 to 280C; Fans
M950 F0 C"fan0" Q20 ; create fan 0 on pin fan0 and set its frequency
M106 P0 C"PartCool" S0 H-1 ; set fan 0 name and value. Thermostatic control is turned off
M950 F1 C"fan1" Q20 ; create fan 1 on pin fan1 and set its frequency
M106 P1 S1 H T45 ; set fan 1 value. Thermostatic control is turned on; Tools
M563 P0 S"Hotend" D0 H1 F0 ; define tool 0
G10 P0 X0 Y0 Z0 ; set tool 0 axis offsets
G10 P0 R0 S0 ; set initial tool 0 active and standby temperatures to 0C; Custom settings are not defined
; Miscellaneous
M501 ; load saved parameters from non-volatile memory
M911 S21 R23 P"M913 X0 Y0 G91 M83 G1 Z3 E-5 F1000" ; set voltage thresholds and actions to run on power loss
T0 ; select first tool///
; homeall.g
; called to home all axes
;
; generated by RepRapFirmware Configuration Tool v3.2.1 on Tue Jan 19 2021 17:33:25 GMT-0500 (Eastern Standard Time)G91
G1 H1 Z-400 F3000
G92 Z0 ; change Z0 to match the actual Z co-ordinate at which the Z end stop triggers
G1 Z10
G1 H1 X-300 Y-300
G1 X5 Y5
G1 H1 X-6 Y-6 F300
G90; set Z position to axis minimum (you may want to adjust this)
; Uncomment the following lines to lift Z after probing
;G91 ; relative positioning
;G1 Z18 F8000 ; lift Z relative to current position
;G90 ; absolute positioning///
; homex.g
; called to home the X axis
;
; generated by RepRapFirmware Configuration Tool v3.2.1 on Tue Jan 19 2021 17:33:25 GMT-0500 (Eastern Standard Time)
G91 ; relative positioning
G1 H2 Z18 F480000 ; lift Z relative to current position
G1 H1 X-305 F3000 ; move quickly to X axis endstop and stop there (first pass)
G1 H2 X5 F480000 ; go back a few mm
G1 H1 X-305 F3600 ; move slowly to X axis endstop once more (second pass)
G1 H2 Z-18 F480000 ; lower Z again
G90 ; absolute positioning///
; homey.g
; called to home the Y axis
;
; generated by RepRapFirmware Configuration Tool v3.2.1 on Tue Jan 19 2021 17:33:25 GMT-0500 (Eastern Standard Time)
G91 ; relative positioning
G1 H2 Z18 F3000 ; lift Z relative to current position
G1 H1 Y-305 F3000 ; move quickly to Y axis endstop and stop there (first pass)
G1 H2 Y5 F3000 ; go back a few mm
G1 H1 Y-305 F3600 ; move slowly to Y axis endstop once more (second pass)
G1 H2 Z-18 F3000 ; lower Z again
G90 ; absolute positioning////
; homez.g
; called to home the Z axis
;
; generated by RepRapFirmware Configuration Tool v3.2.1 on Tue Jan 19 2021 17:33:25 GMT-0500 (Eastern Standard Time)G91 ; relative positioning
G1 H2 Z18 F480000 ; lift Z relative to current position
G1 H1 Z-405 F3000 ; move Z down until the endstop is triggered
G92 Z0 ; set Z position to axis minimum (you may want to adjust this); Uncomment the following lines to lift Z after probing
;G91 ; relative positioning
;G1 Z18 F8000 ; lift Z relative to current position
;G90 ; absolute positioningThank you all for your help, it is greatly appreciated. I feel a lot better with you all helping me, THERE IS STILL HOPE