Resonance, spreadCycle and stealthChop
-
@deckingman or maybe the printer shaking!

-
@matt3o said in Resonance, spreadCycle and stealthChop:
@deckingman or maybe the printer shaking!
When the carriage is stationary?
")
-
@deckingman it's that bad!
-
@matt3o said in Resonance, spreadCycle and stealthChop:
@deckingman it's that bad!
Are we talking about the entire printer rocking slowly or something else? I thought your problem was high frequency resonance (as per title) rather than a very low frequency wobble. If it's the latter, surely you should be looking at fitting some levelling feet and maybe stiffening the frame, rather than messing around with motor settings.
-
@deckingman I was kidding about the shaking. Sorry if it wasn't clear. It's a high frequency resonance that starts from the motor shaft and reaches the head carriage. No amount of weight on the head makes it any better.
-
@matt3o That isn't obvious from the video.
But moving on ....... I note from your first post that you are using 0.9 degree motors. This might sound completely counter intuitive but have you tried 1.8 degree motors? If so, was it better/worse/the same?
Perhaps post you configuration files too - maybe one of us might spot something that could have a bearing on what you are experiencing (although I can't think what off hand).
In any case, let us know how the alternative kinematics works out.
-
Oookay.
I finally tested the new kinematics as per picture of few posts above. Resonance is completely gone. From 1000mm/m to 20000mm/m seems all good. I get just a tiny bit of noise around 3000mm/m but no nasty vibrations. ( @garethky just FYI).
I feel the most likely cause is the length of the belt, but I'm no expert. I don't think the problem was with my corexy setup as I tried two completely different belt routing and they both had the same effect.
Anyway the new system will be overkill but works... so I just have to design a new head now.
@deckingman said in Resonance, spreadCycle and stealthChop:
But moving on ....... I note from your first post that you are using 0.9 degree motors. This might sound completely counter intuitive but have you tried 1.8 degree motors? If so, was it better/worse/the same?
yes I tried, the resonance just moves to another speed.
-
@matt3o Well you have a solution which I guess is the main thing. But I doubt the original cause was the belt length - primarily because my CoreXYUVAB (3 gantries) has a frame size of 600mm square (it's the one I posted a video of) and none of those CoreXY kinematic gantries exhibits the behaviour you describe. But hey - you've found a fix which is the main thing so who cares.
-
@deckingman what size is the belt on your printer?
-
@matt3o said in Resonance, spreadCycle and stealthChop:
@deckingman what size is the belt on your printer?
All 6mm (and a tad less than 5 metres long IIRC).
And before you ask......Nema 17s @2 amps on XY with a moving mass of about 1.5Kgs in the Y direction. Nema 23s @2.8 Amps on UV with a moving mass of about 3Kgs in Y. Nema 17s @2 amps again on AB (can't remember the mass off hand).
Default print speed is 80 mm/sec although I have printed at 300mm/sec with a 6 input hot end feeding equal amounts of filament via 6 Bondtech BMGs. Default non-print speed is 350mm/sec. Accelerations set to 2,000 mm/sec^2 (IIRC).
Never had any resonance issue and "ringing" just doesn't happen (I put that down to the mass and rigidity of the hot end and it's mounting arrangement).
But, when one starts throwing circa 5 Kgs around at 350mm/sec, it can make the entire printer rock around (hence the load balancing AB gantry which just moves lumps of lead in the opposite directions to the XY and UV gantries).
-
@deckingman I'm clueless, I really tried everything I could and wasted dozens of spools of filament to reprint parts.... corexy is not for me. But yeah mine is (was) a lightweight compared to yours.
Do you have a duet3 or duet2? Could it be the drivers?
-
@matt3o Can you post a video/photo of how you now have your belts configured? I'm still trying to work out what you have changed to!
-
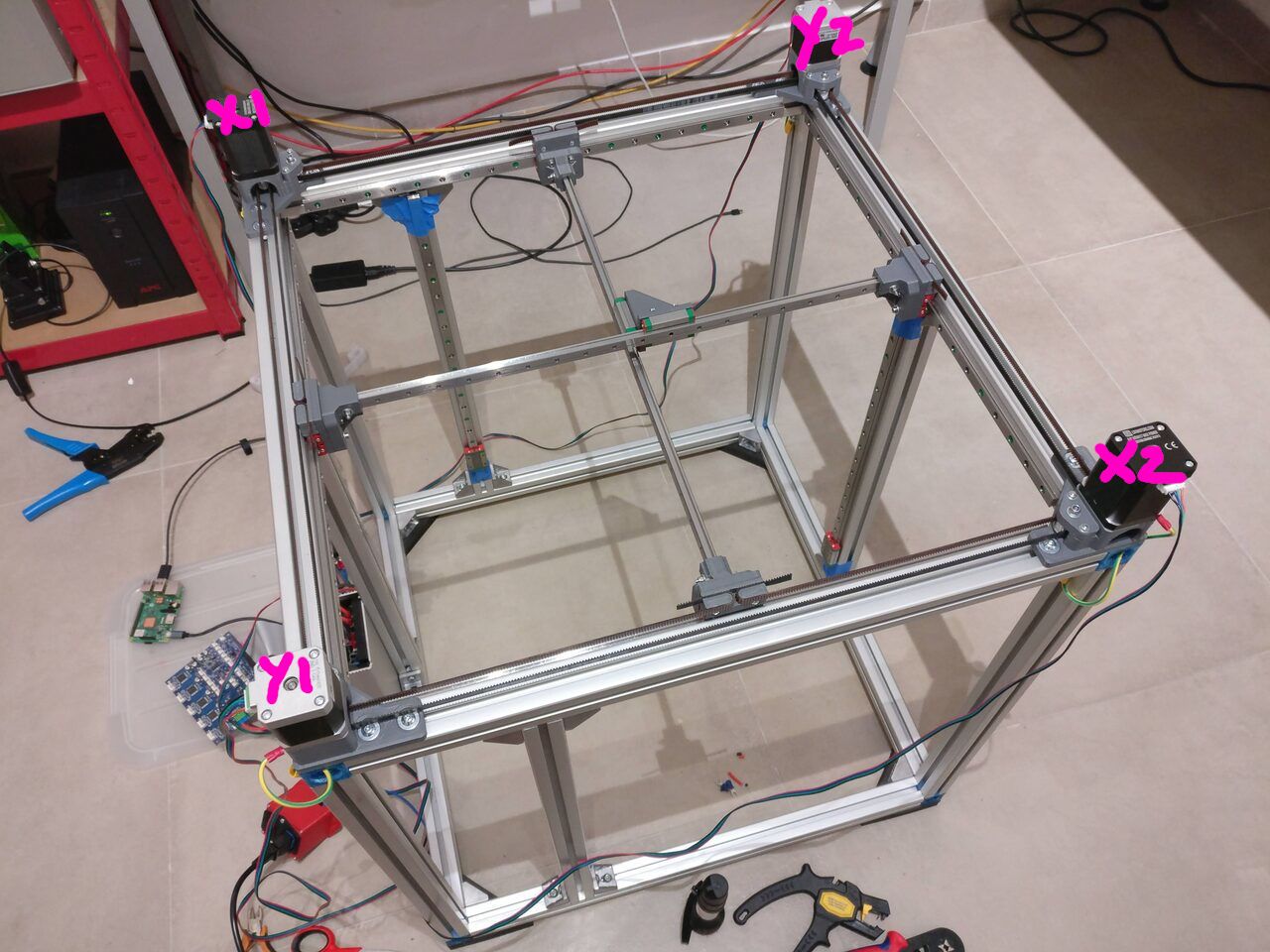
2 motors for X, 2 motors for Y. Simple cartesian in a box

The rails and the frame need to be super square or the gantries will grind. It's a very simple configuration at the end but it needs a lot of motors and a lot of rails.
-
Did your previous corexy setup have 4 motors?
-
@gloomyandy said in Resonance, spreadCycle and stealthChop:
Did your previous corexy setup have 4 motors?
no, it was a simple corexy with 2 motors for XY, but I noticed that resonance happened only when both motors were moving so I switched to this configuration where X and Y are independent.
-
@matt3o said in Resonance, spreadCycle and stealthChop:
@deckingman I'm clueless, I really tried everything I could and wasted dozens of spools of filament to reprint parts.... corexy is not for me. But yeah mine is (was) a lightweight compared to yours.
Do you have a duet3 or duet2? Could it be the drivers?
Mine is currently Duet 3 (Single 6HC main board and three 3HC expansion boards) Prior to that it was a Duet gen 2 Ethernet with Duex 5 expansion board. How about you? - I don't think you mentioned what board or firmware you are using.
Unlikely to be a driver issue I'd have thought, because you'd still have issues after changing the kinematics.
I'd be happy to look over the config.g file to see if I can spot anything which might have contributed to the problem.
-
@deckingman said in Resonance, spreadCycle and stealthChop:
Mine is currently Duet 3 (Single 6HC main board and three 3HC expansion boards) Prior to that it was a Duet gen 2 Ethernet with Duex 5 expansion board. How about you?
I was on the duet3 but I have a duet2 laying around and I'm experimenting with that. The toolboard gave me enough headache.
@deckingman said in Resonance, spreadCycle and stealthChop:
'd be happy to look over the config.g file to see if I can spot anything which might have contributed to the problem.
sure, I really appreciate your help! I made a lot of tests with currents and speeds but I believe the following is the latest version I used.
; _ _ ; ___ ___ ___ ___ ___ _| | |___ ; | _| . | _| -_|- _| | | | . | ; |___|___|_| |___|___|_|_|_|_|_| ; ; Duet 3 Configuration file ; ; General preferences ; -------------------------------------------------- G90 ; send absolute coordinates... M83 ; ... but relative extruder moves M550 P"corezilla" ; set printer name M669 K1 ; select CoreXY mode ; Drives ; -------------------------------------------------- M569 P0.0 S0 ; XY 1 M569 P0.1 S0 ; XY 2 M569 P0.2 S0 ; Z 1 M569 P0.3 S0 ; Z 2 M569 P0.4 S0 ; Z 3 M569 P20.0 S1 ; 1st Extruder on toolboard M584 X0.0 Y0.1 Z0.2:0.3:0.4 E20.0 ; set drive mapping M350 X16 Y16 Z16 E16 I1 ; configure microstepping with interpolation M92 X160.00 Y160.00 Z1600.00 E695.00 ; set steps per mm M906 X1360 Y1360 Z1300 E350 I60 ; set motor currents (mA) and motor idle factor M84 S30 ; Set idle timeout M566 X300.00 Y300.00 Z15.00 E120.00 ; set maximum instantaneous speed changes (jerk) (mm/min) M203 X11400.00 Y11400.00 Z600.00 E2400.00 ; set maximum speeds (mm/min) M201 X3000.00 Y3000.00 Z20.00 E600.00 ; set accelerations (mm/s^2) M593 F45 ; Dynamic Acceleration Adjustment ; Axis Limits ; -------------------------------------------------- M208 X0 Y0 Z0 S1 ; set axis minima M208 X392 Y410 Z360 S0 ; set axis maxima ; Leadscrews location M671 X23.7:218.7:413.7 Y401.0:61.0:401.0 S20 ; Endstops M574 X1 S3 ; configure sensorless endstop for low end on X M574 Y1 S3 ; configure sensorless endstop for low end on Y M915 P0:1 S0 R0 F0 H400 ; configure stall detection; Sensitivity 0, don’t take action, don’t filter, 400steps/sec ; Z-Probe ; -------------------------------------------------- M558 P8 C"^20.io0.in" H20 F120 T6000 ; set Z probe type to switch and the dive height + speeds G31 P500 X0 Y0 Z23.4 ; set Z probe trigger value, offset and trigger height M557 X20:370 Y20:370 S50 ; define mesh grid ; Heaters ; -------------------------------------------------- ; bed M308 S0 P"temp1" Y"thermistor" T100000 B3950 H-10 ; configure sensor 0 as thermistor on pin temp0 M950 H0 C"out1" T0 Q10 ; create bed heater output on out1 and map it to sensor 0 M307 H0 B0 S1.00 ; disable bang-bang mode for the bed heater and set PWM limit ;M307 H0 R0.729 C638.9 D4.16 S1.00 ; PID tuning M307 H0 R0.600 C700 D6 S1.00 ; PID tuning (manual) M140 H0 ; map heated bed to heater 0 M143 H0 S120 ; set temperature limit for bed heater ; 1st tool ;M308 S1 P"20.temp0" Y"thermistor" T100000 B4725 C7.06e-8 ; configure sensor 1 as thermistor on pin 1.temp0 (E3D) M308 S1 P"20.temp0" Y"thermistor" T500000 B4723 C1.19622e-7 H-13 ; configure sensor 1 as thermistor on pin 1.temp0 (Slice) M950 H1 C"20.out0" T1 ; create nozzle heater output on 1.out0 and map it to sensor 1 M307 H1 B0 S1.00 ; disable bang-bang mode for heater and set PWM limit M307 H1 R2.9 C204.0 D4.00 S1.00 V24 ; PID tuning (manual) M143 H1 S320 ; set temperature limit for hotend ; Fans ; -------------------------------------------------- M950 F0 C"20.out1" Q500 ; create fan 0 on toolboard out1 M106 P0 S0 H-1 ; set fan 0 value. Thermostatic control is turned off M950 F1 C"20.out2" Q500 ; create fan 1 on toolboard out2 M106 P1 S1 H1 T45 ; set fan 1 value. Thermostatic control is turned on ; Tools ; -------------------------------------------------- M563 P0 S"bondtech" D0 H1 F0 ; define tool 0 G10 P0 X0 Y0 Z0 ; set tool 0 axis offsets G10 P0 R0 S0 ; set initial tool 0 active and standby temperatures to 0C M572 D0 S0.035 ; pressure advance ; Closing ; -------------------------------------------------- T0 ; select tool -
@matt3o Nothing much leaps out at me from your config.g file. I note that you are using DAA (M593). Never had the need to use it myself - what happens if you take it out? Better/same/worse?
The motor currents look low if your motors are 2Amps but I seem to recall that you'd played around with different settings.
Unrelated to your resonance problem but your instantaneous speed change threshold (jerk) settings are low. That's likely to slow down segmented arc moves. (I use 900 as opposed to your 300). Your extruder jerk at 120 will play havoc with pressure advance if you start using that. Suggest you set it really high so that it can't interfere with print speeds (I use 3600).
Sorry that I can't be much more help with your vibration issues.
-
@deckingman thanks for your feedback, really appreciate all your help. I played with currents/speed/accel/jerk. I tried anything I could including DAA. Nothing really helps. Only setting amperage incredibly low (below 1A) somehow mitigates the problem.
Regarding the extruder, thanks for the heads up... I wish I was already optimizing the extruder

-
@matt3o Probably a bit late now, but I wonder if changing micro stepping to (say) 32x or 64X would have had any effect. Strange that reducing motor currents helped .......