Z offset on Inductive sensors
-
@phaedrux the current reduction is only for the probing step, then current is retored to 100%
Also, Im using 30% but I hardly can stop the bed using my hand at that power. Both motors have a really strong arm. I did test and Im at risk of loosing steps at 20 %. So it is somehow not probable that im loosing steps at 30%.Still I did te test at 100% and the problem remains.
-
Can you post an image of what your mesh heightmap looks like displayed in DWC?
-
@tinchus said in Z offset on Inductive sensors:
the current reduction is only for the probing step, then current is retored to 100%
Out of curiosity why do you reduce the current?
Thanks.
Frederick
-
@fcwilt because I planned the printer to have eough power to have all the build plate full of print, and since it is a big volumen, theoretically I can have like 15 kgs if I print metal. So Z motors have enough power to move that mass.
BUT, if something goes wrong, the also have the power to destroy my hotenfd and bend the bed if the printhead crash against the bed at full powwer. By reducing to 30% while homing, if something goes wrong, they will start to loose steps before bending my bed. -
@tinchus said in Z offset on Inductive sensors:
So Z motors have enough power to move that mass.BUT, if something goes wrong, the also have the power to destroy my hotenfd and bend the bed
Wow.
What steppers are you using?
Thanks.
Frederick
-
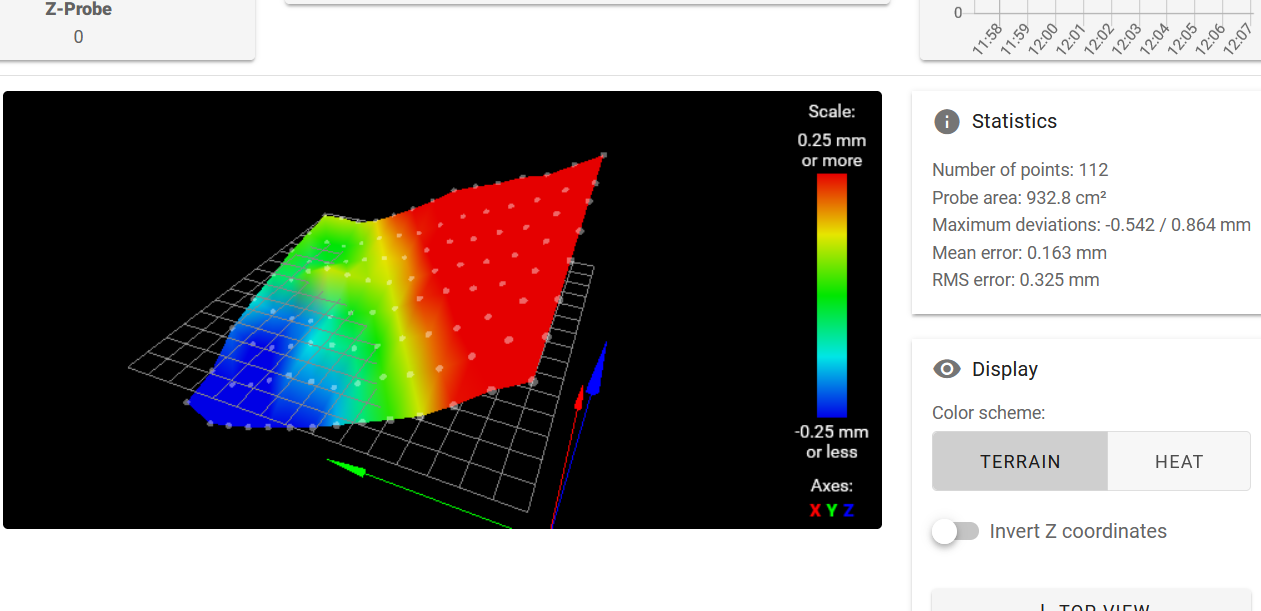
@phaedrux This is just from the oven: heighmap with print chamber at 120 degrees celsius:
-
@tinchus said in Z offset on Inductive sensors:
This is just from the oven: heighmap with print chamber at 120 degrees celsius:
That is not good.
But it does make me feel better about mine.
")
At what XY point are you setting the Z=0 datum with G30 prior to creating the heightmap?
Thanks.
Frederick
-
That's quite a lot of tilt. On the bright side it looks like the surface itself is mostly flat. Is there anyway you can square the bed and gantry a bit better?
-
@phaedrux What you are looking is the normal deformation an aluinium bed will have under 120 degrees celsius + yes there is some tilt to the front.
-
-
@tinchus said in Z offset on Inductive sensors:
@phaedrux What you are looking is the normal deformation an aluinium bed will have under 120 degrees celsius + yes there is some tilt to the front.
If that is "normal" for your setup I think you need to change the design - that is a lot of tilt - you are talking about 7 to 14 layers of compensation required.
And the nozzle-to-bed relationship will likely have a negative effect on print quality.
-
@fcwilt You are loosing the focus: compensation is working OK. The problem is the Z offset reported, is not realistic.
-
Try this, when measuring your G30 S-1 after touching down your nozzle to the bed, job the probe so that it's over that same point. If there is enough tilt there will be a difference in height between where the nozzle is and the probe is. Just like the triangle formed by the ski jumper leaving the ramp.
-
@tinchus said in Z offset on Inductive sensors:
@fcwilt You are loosing the focus: compensation is working OK. The problem is the Z offset reported, is not realistic.
What do you mean by realistic?
It's accurate so isn't that "real"?
Frederick