BL-Touch V3.1 not automatically deploying
-
Hi.
I am currently configuring a custom 3D printer and so far have overcome all of the other problems and am now at my wits end regarding my BL-Touch...-
->Problem description:
When turning on my machine, the Probe does its automatical restract-and-deploy test 2 times, like it should. Afterwards, it turns red (constant, not blinking). M401 and M402 do what the should do. But when I call G30 OR G29 to home, the Pin won't deploy on its own, so if I wouldnt hit the Emergency-Stop, the hotend would crash down into the bed (since Z-axis is moving). -
my M115 says Reprap 3.2.2

I would be extremely grateful for your help as I am under time pressure; and since this is the last thing to adjust before a first testprint, I am quite unnerved.


Looking forward to your answers
")
EDIT:
I forgot to mention quite a few things:
I am using Duet 3 MB6HC and the reprapfirmware-online-configtoolAlso I did the wiring according to this guide on duet dozuki:
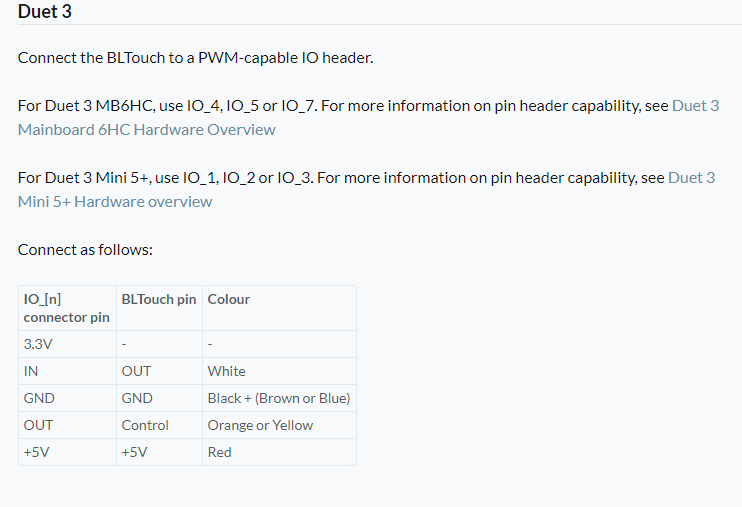
so my black (endstopground) and brown (powerground) cable are connected immediatly after the bl touch (not quite sure if this could give me a problem, thats why im mentioning it here)EDIT END
-
-
It's very strange that M401 and M402 work to deploy and retract but not when G30 and G29 are sent.
Can you please provide the results of sending M122 and M98 P"config.g" in the gcode console?
Please post the contents of your deploy and retract macros. Also ensure they are located in the system folder and not the macros folder.
How are you sending G30 and G29?
-
Hi phaedrux, thank you very much for your time
- my m122 sends me:
m122
=== Diagnostics ===
RepRapFirmware for Duet 3 MB6HC version 3.2.2 running on Duet 3 MB6HC v1.01 or later (standalone mode)
Board ID: 08DJM-9P63L-DJMSS-6JTD6-3SD6L-KUDZ9
Used output buffers: 1 of 40 (11 max)
=== RTOS ===
Static ram: 149788
Dynamic ram: 92940 of which 16 recycled
Never used RAM 116088, free system stack 200 words
Tasks: NETWORK(ready,210) ETHERNET(blocked,110) HEAT(blocked,300) CanReceiv(blocked,927) CanSender(blocked,371) CanClock(blocked,352) TMC(blocked,53) MAIN(running,1105) IDLE(ready,19)
Owned mutexes:
=== Platform ===
Last reset 00:00:41 ago, cause: power up
Last software reset at 2021-05-26 17:21, reason: User, GCodes spinning, available RAM 116136, slot 1
Software reset code 0x0003 HFSR 0x00000000 CFSR 0x00000000 ICSR 0x00400000 BFAR 0x00000000 SP 0x00000000 Task MAIN Freestk 0 n/a
Error status: 0x00
Aux0 errors 0,0,0
Aux1 errors 0,0,0
MCU temperature: min 40.5, current 45.2, max 45.4
Supply voltage: min 23.7, current 23.8, max 23.9, under voltage events: 0, over voltage events: 0, power good: yes
12V rail voltage: min 12.1, current 12.2, max 12.7, under voltage events: 0
Driver 0: position 0, standstill, reads 38227, writes 14 timeouts 0, SG min/max 0/0
Driver 1: position 0, standstill, reads 38227, writes 14 timeouts 0, SG min/max 0/0
Driver 2: position 0, standstill, reads 38227, writes 14 timeouts 0, SG min/max 0/0
Driver 3: position 0, standstill, reads 38227, writes 14 timeouts 0, SG min/max 0/0
Driver 4: position 0, standstill, reads 38230, writes 11 timeouts 0, SG min/max 0/0
Driver 5: position 0, standstill, reads 38231, writes 11 timeouts 0, SG min/max 0/0
Date/time: 2021-05-27 10:51:18
Slowest loop: 13.91ms; fastest: 0.05ms
=== Storage ===
Free file entries: 10
SD card 0 detected, interface speed: 25.0MBytes/sec
SD card longest read time 2.4ms, write time 0.0ms, max retries 0
=== Move ===
DMs created 125, maxWait 0ms, bed compensation in use: none, comp offset 0.000
=== MainDDARing ===
Scheduled moves 0, completed moves 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1
=== AuxDDARing ===
Scheduled moves 0, completed moves 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1
=== Heat ===
Bed heaters = 0 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1, chamberHeaters = -1 -1 -1 -1
=== GCodes ===
Segments left: 0
Movement lock held by null
HTTP is idle in state(s) 0
Telnet is idle in state(s) 0
File is idle in state(s) 0
USB is idle in state(s) 0
Aux is idle in state(s) 0
Trigger is idle in state(s) 0
Queue is idle in state(s) 0
LCD is idle in state(s) 0
SBC is idle in state(s) 0
Daemon is idle in state(s) 0
Aux2 is idle in state(s) 0
Autopause is idle in state(s) 0
Code queue is empty.
=== Network ===
Slowest loop: 2.28ms; fastest: 0.02ms
Responder states: HTTP(0) HTTP(0) HTTP(0) HTTP(0) HTTP(0) HTTP(0) FTP(0) Telnet(0), 0 sessions Telnet(0), 0 sessions
HTTP sessions: 1 of 8
- Ethernet -
State: active
Error counts: 0 0 1 0 0
Socket states: 5 2 2 2 2 0 0 0
=== CAN ===
Messages queued 166, send timeouts 373, received 0, lost 0, longest wait 0ms for reply type 0, free buffers 48
-
I am using duet web control and the RRF-configtool and when i send M98 P"config.g" over the web control, it sends <M98 P"config.g" HTTP request timed out> and then the overlay says that the connection is lost and tries to reconnect. After that, a restart of the machine is needed and its back to normal.
-
retractprobe:
; retractprobe.g
; called to retract a physical Z probe
;
; generated by RepRapFirmware Configuration Tool v3.2.3 on Wed May 26 2021 12:43:50 GMT+0200 (Mitteleuropäische Sommerzeit)
M280 P0 S90 ; retract BLTouch -
deployprobe:
; deployprobe.g
; called to deploy a physical Z probe
;
; generated by RepRapFirmware Configuration Tool v3.2.3 on Wed May 26 2021 12:43:50 GMT+0200 (Mitteleuropäische Sommerzeit)
M280 P0 S10 ; deploy BLTouch -
i am sending everything through the duet web control overlay
-
also, I am using the latest BL-Touch (V3.1)
-
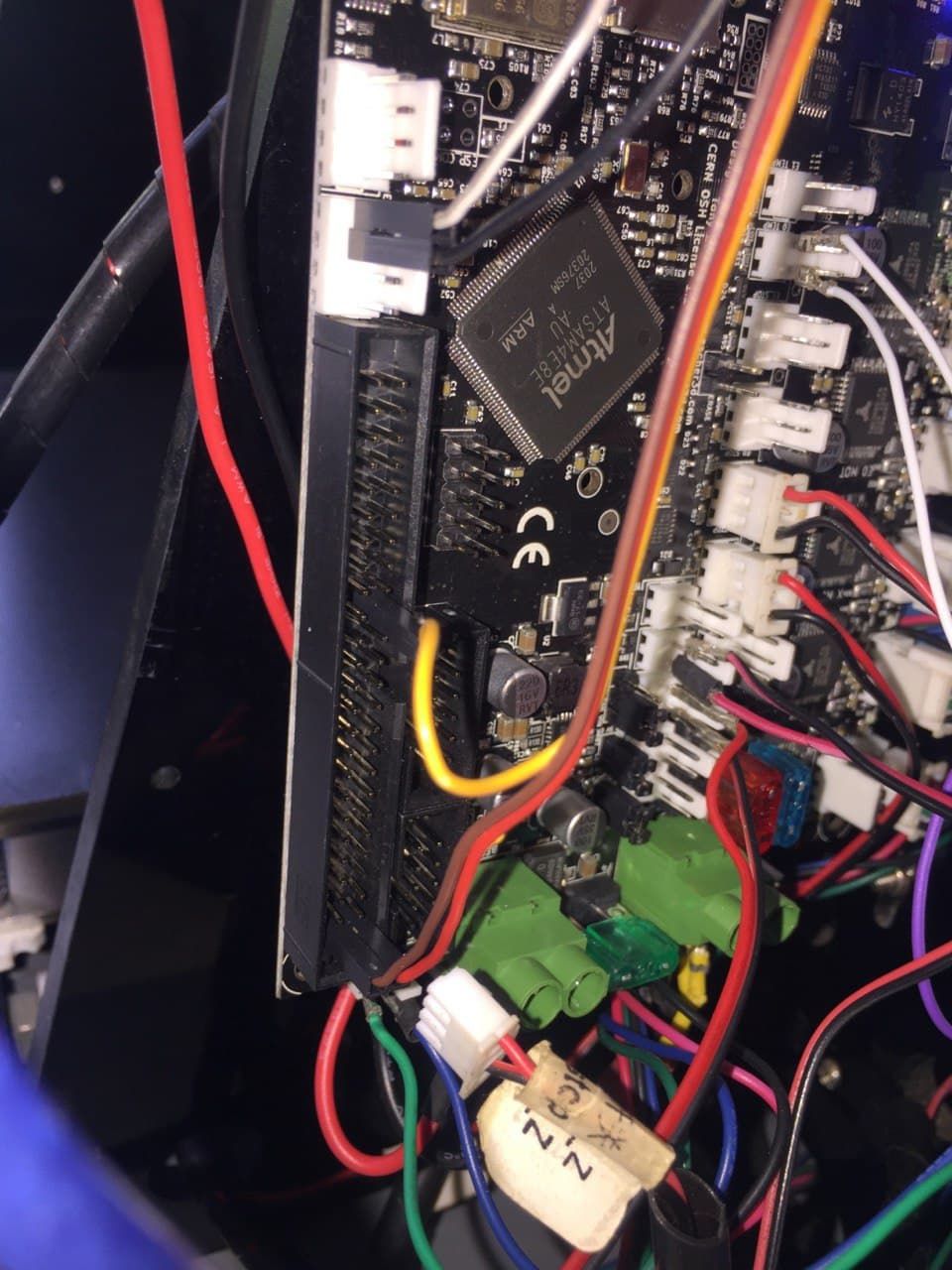
Here is a picture of my (temporary) wiring of the BL (connected to Duet 3 MB6HC, IO-Port 7). Is this wrong? I may be dumb.

-
Another important thing: if I first manually deploy the probe with M280 P0 S10 and then home, it works andthe z-axis goes up as soon as the bl touch touches the surface (but the pin does not retract here). So, when I command a G29 AFTER that, it will say: "error: zprobe not triggered during probing" or something like that. So in conclusion, the first homing works after deploying the pin with M280 P0 S10 and after that, it doesnt work at all.
Greetings
- my m122 sends me:
-
@chris-0, it may not help, but you should remove the ^ from this line:
M558 P9 C"^io7.in" H7 F120 T600 ; set Z probe type to bltouch and the dive height + speeds
The pullup resistor never needs to be enabled when using Duet 3 IOx.IN pins, and doing so worsens the noise margin.
Also, please send M558 without parameters, and check that the values it reports are the ones you set in config.g.
-
@chris-0 said in BL-Touch V3.1 not automatically deploying:
I am using duet web control and the RRF-configtool and when i send M98 P"config.g" over the web control, it sends <M98 P"config.g" HTTP request timed out> and then the overlay says that the connection is lost and tries to reconnect. After that, a restart of the machine is needed and its back to normal.
Are you sending that command from the gcode console tab? or from the little bar at the top?
-
@phaedrux @ dc42
Hi y'all and sorry for not responding this long I was very busy the last week.
But in the last days I decided to switch on a capacitive sensor because nothing seemed to work with my BL-Touch-scenario. So this matter is closed.
But still, I wanna thank you very much for being so kind as to wanna help me with my problem!
Greetings from Austria
-
I have very similar issue, so decided not to start a new topic but post here instead. For 2 days now I can't make my 3DTouch work on Duet2 Wifi 1.4 with RRF3.3 Whatever I try it just wouldn't probe the bed and as a result Z goes all the way down. When turned on sensor would deploy and retract, but after unsuccessful homing it doesn't react to M401/M402 commands any more until next reset. Connected to Heater 7, all wiring was double and triple checked. I just switched to RRF from Marlin so maybe there are some errors in configs as I was trying to set things up basing on information from 2 older posts,
Re: Bl touch Install Success.
Re: Bl touch issues not homing z with bl touch .
These helped me to set up homing movement but probe just doesn't work...config.g
; Endstops
M574 X1 S1 P"!xstop" ; configure active-low endstop for low end on X via pin xstop
M574 Y1 S1 P"!ystop"
M574 Z0 P"!zstop" ; configure active-low endstop for low end on Z via pin zstop; Z-Probe
M950 S0 C"exp.heater7" ; create servo pin 0 for BLTouch
M558 P9 C"^zprobe.in" H5 F120 T12000 ; set Z probe type to bltouch and the dive height + speeds
G31 P500 X-32 Y0 Z3 ; set Z probe trigger value, offset and trigger height
M557 X20:200 Y20:200 S40 ; define mesh gridhomeall.g
; generated by RepRapFirmware Configuration Tool v3.2.3 on Mon Jul 12 2021 06:15:47 GMT+0700 (Indochina Time)
G91 ; relative positioning
G1 H2 Z5 F12000 ; lift Z relative to current position
G1 H1 X-258 Y-235 F8000 ; move quickly to X and Y axis endstops and stop there (first pass)
G1 H2 X5 Y5 F12000 ; go back a few mm
G1 H1 X-258 Y-235 F460 ; move slowly to X and Y axis endstops once more (second pass)
G90
G1 X142 Y120 F9000 ; move X and Y to bed center
G30 ; move Z down stopping at the endstop ; absolute positioning
;G92 Z0 ; set Z position to axis minimum (you may want to adjust this); Uncomment the following lines to lift Z after probing
G91 ; relative positioning
G1 Z5 F200 ; lift Z relative to current position
G90 ; absolute positioninghomez.g
; generated by RepRapFirmware Configuration Tool v3.2.3 on Mon Jul 12 2021 06:15:47 GMT+0700 (Indochina Time)
G91 ; relative positioning
G1 H2 Z5 F12000 ; lift Z relative to current position
;G1 H1 Z-245 F1800 ; move Z down until the endstop is triggered
;G92 Z0 ; set Z position to axis minimum (you may want to adjust this)
G90
G1 X143 Y120 F2000 ; put head over the center of the bed, or wherever you want to probe
G30 ; lower head, stop when probe triggered and set Z to trigger heightM558 returns this: Z Probe 0: type 9, input pin zprobe.in, output pin nil, dive height 5.0mm, probe speeds 120,120mm/min, travel speed 12000mm/min, recovery time 0.00 sec, heaters normal, max taps 1, max diff 0.03
m122
=== Diagnostics ===
RepRapFirmware for Duet 2 WiFi/Ethernet version 3.3 (2021-06-15 21:44:54) running on Duet WiFi 1.02 or later
Board ID: 0JD0M-9X6JA-JUNSS-6J1FG-3SD6P-1AKVU
Used output buffers: 3 of 24 (11 max)
=== RTOS ===
Static ram: 23876
Dynamic ram: 75276 of which 0 recycled
Never used RAM 15264, free system stack 184 words
Tasks: NETWORK(ready,14.0%,237) HEAT(delaying,0.0%,330) Move(notifyWait,0.1%,364) MAIN(running,85.7%,445) IDLE(ready,0.1%,29), total 100.0%
Owned mutexes:
=== Platform ===
Last reset 00:17:41 ago, cause: reset button or watchdog
Last software reset at 2021-07-13 03:09, reason: User, GCodes spinning, available RAM 12056, slot 2
Software reset code 0x0003 HFSR 0x00000000 CFSR 0x00000000 ICSR 0x0041f000 BFAR 0xe000ed38 SP 0x00000000 Task MAIN Freestk 0 n/a
Error status: 0x00
Step timer max interval 0
MCU temperature: min 46.5, current 47.4, max 47.9
Supply voltage: min 23.8, current 24.0, max 24.2, under voltage events: 0, over voltage events: 0, power good: yes
Heap OK, handles allocated/used 0/0, heap memory allocated/used/recyclable 0/0/0, gc cycles 0
Driver 0: position 0, standstill, SG min/max not available
Driver 1: position 0, standstill, SG min/max not available
Driver 2: position 0, standstill, SG min/max not available
Driver 3: position 0, standstill, SG min/max not available
Driver 4: position 0, standstill, SG min/max not available
Driver 5: position 0
Driver 6: position 0
Driver 7: position 0
Driver 8: position 0
Driver 9: position 0
Driver 10: position 0
Driver 11: position 0
Date/time: 2021-07-13 06:22:41
Cache data hit count 4294967295
Slowest loop: 42.43ms; fastest: 0.17ms
I2C nak errors 0, send timeouts 0, receive timeouts 0, finishTimeouts 0, resets 0
=== Storage ===
Free file entries: 10
SD card 0 detected, interface speed: 20.0MBytes/sec
SD card longest read time 2.0ms, write time 22.9ms, max retries 0
=== Move ===
DMs created 83, maxWait 0ms, bed compensation in use: none, comp offset 0.000
=== MainDDARing ===
Scheduled moves 0, completed moves 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1
=== AuxDDARing ===
Scheduled moves 0, completed moves 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1
=== Heat ===
Bed heaters = 0 -1 -1 -1, chamberHeaters = -1 -1 -1 -1
Heater 1 is on, I-accum = 0.0
=== GCodes ===
Segments left: 0
Movement lock held by null
HTTP is idle in state(s) 0
Telnet is idle in state(s) 0
File is idle in state(s) 0
USB is idle in state(s) 0
Aux is idle in state(s) 0
Trigger is idle in state(s) 0
Queue is idle in state(s) 0
LCD is idle in state(s) 0
Daemon is idle in state(s) 0
Autopause is idle in state(s) 0
Code queue is empty.
=== Network ===
Slowest loop: 218.41ms; fastest: 0.00ms
Responder states: HTTP(2) HTTP(0) HTTP(0) HTTP(0) FTP(0) Telnet(0), 0 sessions
HTTP sessions: 1 of 8- WiFi -
Network state is active
WiFi module is connected to access point
Failed messages: pending 0, notready 0, noresp 0
WiFi firmware version 1.23
WiFi MAC address e8:dc:84:a8:3b:de
WiFi Vcc 3.36, reset reason Turned on by main processor
WiFi flash size 4194304, free heap 24288
WiFi IP address 192.168.1.117
WiFi signal strength -65dBm, mode none, reconnections 0, sleep mode modem
Clock register ffffffff
Socket states: 0 0 0 0 0 0 0 0
- WiFi -
-
@commie Please post your deployprobe.g and retractprobe.g files.
Also post the results of sending M98 P"config.g"Does the probe deploy and retract when you send the M280 P0 servo commands that should be in your deploy and retract macros?
-
@phaedrux said in BL-Touch V3.1 not automatically deploying:
M98 P"config.g
Thank you.
M98 P"config.g"
HTTP is enabled on port 80
FTP is disabled
TELNET is disableddeployprobe and retractprobe files are single line M280 P0 S10 and M280 P0 S90 accordingly. Probe does react to these commands.
-
@commie said in BL-Touch V3.1 not automatically deploying:
deployprobe and retractprobe files are single line M280 P0 S10 and M280 P0 S90 accordingly. Probe does react to these commands.
Yet M401 and M402 don't work? Where are those macros located? They should be in the system folder alongside config.g
-
Checked again, at the moment 401 and 402 do work. Unfortunately I don't remember at which stage that problem occurred and what I changed since - it was a lot of hit and miss attempts yesterday. However, Z still wouldn't stop when probe touches the bed. Macros are where web interface stores them, in the root.
-
Ok, so M401 and M402 work. That's good. You should be able to run through this.
https://duet3d.dozuki.com/Wiki/Test_and_calibrate_the_Z_probe
When you send G30 the pin should deploy and touching the pin should cause it to trigger. If that doesn't happen, check the white wire. That's the trigger signal wire.
-
@phaedrux
G30 doesn't deploy the probe. All wiring was checked. Sensor itself is 100% working taken off another printer. -
@Commie If M401 and M402 work to deploy and retract the probe, then G30 should as well. Please verify.
Macros are where web interface stores them, in the root.
I'm not sure what that means. deployprobe.g and retractprobe.g should be in the /sys/ folder on the SD card alongside config.g. Or found in DWC in the system tab. Is that the case?
-
deployprobe.g and retractprobe.g are in the /sys/ folder, I thought you were asking about user created macros (which I made with same commands)
Anyway, when I reset the printer after lash Z crash, homed X and Y and ran G30 probe deploys, goes all the way down and... keeps going, probe stays deployed. Luckily my printer is Anet A8 and these experiments don't cause any damage to the bed or Z axis. -
@commie In that case it definitely seems like the trigger signal wire isn't making a connection.
Instead of letting it crash, try the testing method here: https://duet3d.dozuki.com/Wiki/Test_and_calibrate_the_Z_probe
-
Yeah I tried that too putting something in probe's way, same result (ie no result). Wire integrity was checked with multimeter, all good. There's 5V on red and 3.4V on white wires. Just in case here's my connection pic attached.
I'm also a bit concerned about M558 returning "output pin nil", not sure if it's needed. -
@commie the output pin nil is correct. However, you may need a nonzero recovery time for BLTouch. This is the M558 R parameter. Otherwise you may see message "Z probe was already triggered at start of probing move". AFAIR a value of R0.2 is sufficient.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42 said in BL-Touch V3.1 not automatically deploying:
Otherwise you may see message "Z probe was already triggered at start of probing move". AFAIR a value of R0.2 is sufficient.
Thanks, I will set that. But so far all I see for now is "Z probe wasn't deployed during homing" or something along these lines
 Changing to heater 3 made no effect, too. I have 2 3D Touch sensors and I tried swapping them etc, no luck. Both do work on another printer (stock Geeetech A20). No idea what else to do.
Changing to heater 3 made no effect, too. I have 2 3D Touch sensors and I tried swapping them etc, no luck. Both do work on another printer (stock Geeetech A20). No idea what else to do.
PS For some reason when I set Z0 manually using G92 Z0 web interface shows Z100, not Z0. -
@commie You could try moving the white wire from the zprobe input to the z_stop pin and changing the pinname in M558 as well.
It's a clone probe on a clone duet, so sometimes things don't work as expected?
