z probe not referenced
-
@axiom then post the contents of your homeall.g file
-
@jay_s_uk
this is a standard feature that came with the dashboard... where can i find the content? -
@axiom on the system tab on the left hand side
-
@axiom ; homeall.g
; called to home all axes
;
; generated by RepRapFirmware Configuration Tool v3.3.12 on Wed Aug 24 2022 12:56:11 GMT+0200 (Mitteleuropäische Sommerzeit)
G91 ; relative positioning
G1 H2 Z5 F6000 ; lift Z relative to current position
G1 H1 X-505 Y-505 F1800 ; move quickly to X and Y axis endstops and stop there (first pass)
G1 H2 X5 Y5 F6000 ; go back a few mm
G1 H1 X-505 Y-505 F360 ; move slowly to X and Y axis endstops once more (second pass)
G1 H1 Z705 F360 ; move Z up stopping at the endstop
G90 ; absolute positioning
G92 Z700 ; set Z position to axis maximum (you may want to adjust this); Uncomment the following lines to lift Z after probing
;G91 ; relative positioning
;G1 Z5 F100 ; lift Z relative to current position
;G90 ; absolute positioning -
@axiom said in z probe not referenced:
G1 H1 Z705 F360 ; move Z up stopping at the endstop
G90 ; absolute positioning
G92 Z700 ; set Z position to axis maximum (you may want to adjust this)you're trying to home using an endstop.
To home with a probe you need to move to the position you want to probe, usually the middle of the bed and then useG30
E.g.G1 X150 Y150 G30 -
@jay_s_uk
I commented out lines 6 and 10 and added lines 11 and 12.
Now the message appears: "G28 Error: Probe already triggered at start of probinge movehere the new code:
; homeall.g
; called to home all axes
;
; generated by RepRapFirmware Configuration Tool v3.3.12 on Wed Aug 24 2022 12:56:11 GMT+0200 (Mitteleuropäische Sommerzeit)
G91 ; relative positioning
;G1 H2 Z5 F6000 ; lift Z relative to current position
G1 H1 X-505 Y-505 F1800 ; move quickly to X and Y axis endstops and stop there (first pass)
G1 H2 X5 Y5 F6000 ; go back a few mm
G1 H1 X-505 Y-505 F360 ; move slowly to X and Y axis endstops once more (second pass)
;G1 H1 Z705 F360 ; move Z up stopping at the endstop
G1 X150 Y150
G30
G90 ; absolute positioning
G92 Z700 ; set Z position to axis maximum (you may want to adjust this); Uncomment the following lines to lift Z after probing
;G91 ; relative positioning
;G1 Z5 F100 ; lift Z relative to current position
;G90 ; absolute positioning -
@axiom said in z probe not referenced:
;G1 H2 Z5 F6000 ; lift Z relative to current position
this line is a good idea to have
@axiom said in z probe not referenced:
G92 Z700 ; set Z position to axis maximum (you may want to adjust this)
this line should be removed.
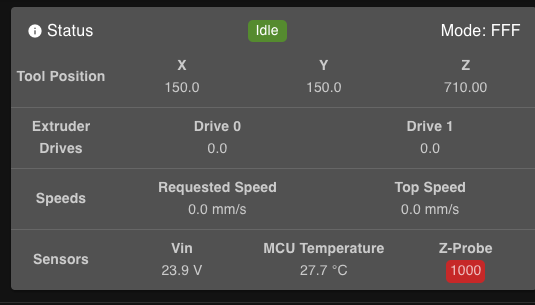
And what value does your probe show as having on the status screen?
Owns various duet boards and is the main wiki maintainer for the Teamgloomy LPC/STM32 port of RRF. Assume I'm running whatever the latest beta/stable build is
-
@jay_s_uk now comes the message:
Error: Failed to enable endstopsnwe code:
; homeall.g
; called to home all axes
;
; generated by RepRapFirmware Configuration Tool v3.3.12 on Wed Aug 24 2022 12:56:11 GMT+0200 (Mitteleuropäische Sommerzeit)
G91 ; relative positioning
G1 H2 Z5 F6000 ; lift Z relative to current position
G1 H1 X-505 Y-505 F1800 ; move quickly to X and Y axis endstops and stop there (first pass)
G1 H2 X5 Y5 F6000 ; go back a few mm
G1 H1 X-505 Y-505 F360 ; move slowly to X and Y axis endstops once more (second pass)
;G1 H1 Z705 F360 ; move Z up stopping at the endstop
G1 X150 Y150
G30
G90 ; absolute positioning
;G92 Z700 ; set Z position to axis maximum (you may want to adjust this); Uncomment the following lines to lift Z after probing
;G91 ; relative positioning
;G1 Z5 F100 ; lift Z relative to current position
;G90 ; absolute positioning -
-
@axiom that shows that your probe is triggered already. what type of probe is it?
-
@jay_s_uk
a capacitive proximity sensor:
https://www.amazon.de/Heschen-kapazitiver-Näherungsschalter-Sensor-LJC18-A3-H-Z-Normalöfnung/dp/B071J6PXD1/ref=sr_1_5?__mk_de_DE=ÅMÅŽÕÑ&crid=1NG0J5PZMIZC4&keywords=kapazitiver+sensor&qid=1661366023&sprefix=kapizativer+sensor%2Caps%2C138&sr=8-5i got the same for my little ender printer and it works since 2 years
-
@axiom you may need to invert the signal
e.g.M558 P1 C"!zprobe.in"
but you should test it before trying to home with it -
@jay_s_uk
now the z-axis moves down instead of up when homing...but it responds to my hand and stops -
@axiom you need to invert the direction of your Z axis then. It should be negative movement going up and positive going down
-
@jay_s_uk And how do I do that?
-
@axiom Change the S value in each M569 for the Z drivers. If its 0 change it to 1 and vice versa
-
@jay_s_uk how do i know which ones are for the z-axis...since i connected two, i don't want them to work in opposite directions...that might break the motors
-
@axiom you've mapped the driver numbers in M584
-
@jay_s_uk you are super! it works... thanks for your patience!
-
 undefined Phaedrux marked this topic as a question
undefined Phaedrux marked this topic as a question
-
undefined Phaedrux has marked this topic as solved