z probe not referenced
-
@jay_s_uk now comes the message:
Error: Failed to enable endstopsnwe code:
; homeall.g
; called to home all axes
;
; generated by RepRapFirmware Configuration Tool v3.3.12 on Wed Aug 24 2022 12:56:11 GMT+0200 (Mitteleuropäische Sommerzeit)
G91 ; relative positioning
G1 H2 Z5 F6000 ; lift Z relative to current position
G1 H1 X-505 Y-505 F1800 ; move quickly to X and Y axis endstops and stop there (first pass)
G1 H2 X5 Y5 F6000 ; go back a few mm
G1 H1 X-505 Y-505 F360 ; move slowly to X and Y axis endstops once more (second pass)
;G1 H1 Z705 F360 ; move Z up stopping at the endstop
G1 X150 Y150
G30
G90 ; absolute positioning
;G92 Z700 ; set Z position to axis maximum (you may want to adjust this); Uncomment the following lines to lift Z after probing
;G91 ; relative positioning
;G1 Z5 F100 ; lift Z relative to current position
;G90 ; absolute positioning -
-
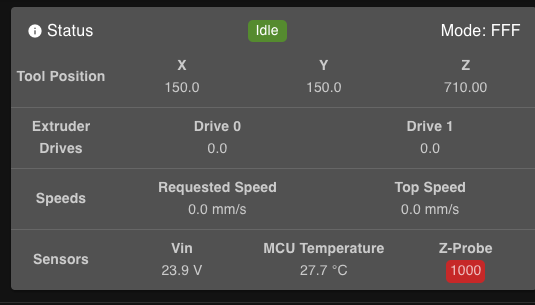
@axiom that shows that your probe is triggered already. what type of probe is it?
-
@jay_s_uk
a capacitive proximity sensor:
https://www.amazon.de/Heschen-kapazitiver-Näherungsschalter-Sensor-LJC18-A3-H-Z-Normalöfnung/dp/B071J6PXD1/ref=sr_1_5?__mk_de_DE=ÅMÅŽÕÑ&crid=1NG0J5PZMIZC4&keywords=kapazitiver+sensor&qid=1661366023&sprefix=kapizativer+sensor%2Caps%2C138&sr=8-5i got the same for my little ender printer and it works since 2 years
-
@axiom you may need to invert the signal
e.g.M558 P1 C"!zprobe.in"
but you should test it before trying to home with it -
@jay_s_uk
now the z-axis moves down instead of up when homing...but it responds to my hand and stops -
@axiom you need to invert the direction of your Z axis then. It should be negative movement going up and positive going down
-
@jay_s_uk And how do I do that?
-
@axiom Change the S value in each M569 for the Z drivers. If its 0 change it to 1 and vice versa
-
@jay_s_uk how do i know which ones are for the z-axis...since i connected two, i don't want them to work in opposite directions...that might break the motors
-
@axiom you've mapped the driver numbers in M584
-
@jay_s_uk you are super! it works... thanks for your patience!
-
 undefined Phaedrux marked this topic as a question
undefined Phaedrux marked this topic as a question
-
undefined Phaedrux has marked this topic as solved