Toolboard 1LC "Port must be on mainboard"
-
Almost finished setting up my new Duet 3 Toolboard 1LC, but having trouble . i have everything wired and most peripherals working, but I get "Port must be on mainboard" error. Ive attached a wiring picture, my config.g, and the output of M98 P"config.g" and M122 B121:
M98 P"config.g"
9/30/2022, 3:33:11 PM Warning: Heater 0 predicted maximum temperature at full power is 328°C Error: Port must be on main board Warning: the height map was loaded when the current Z=0 datum was not determined by probing. This may result in a height offset. Warning: Macro file config-override.g not foundM122 B121
9/30/2022, 3:34:16 PM M122 B121 Diagnostics for board 121: Duet TOOL1LC rev 1.1 or later firmware version 3.4.2 (2022-09-13 15:06:56) Bootloader ID: SAMC21 bootloader version 2.3 (2021-01-26b1) All averaging filters OK Never used RAM 2592, free system stack 62 words Tasks: Move(notifyWait,0.0%,153) HEAT(notifyWait,0.2%,115) CanAsync(notifyWait,0.0%,61) CanRecv(notifyWait,0.0%,76) CanClock(notifyWait,0.0%,65) ACCEL(notifyWait,0.0%,61) TMC(delaying,3.0%,57) MAIN(running,91.8%,349) IDLE(ready,0.0%,26) AIN(delaying,4.9%,142), total 100.0% Last reset 00:04:02 ago, cause: power up Last software reset data not available Driver 0: pos 0, 80.0 steps/mm,standstill, SG min 0, read errors 0, write errors 0, ifcnt 11, reads 55790, writes 11, timeouts 0, DMA errors 0, CC errors 0, steps req 0 done 0 Moves scheduled 0, completed 0, in progress 0, hiccups 0, step errors 0, maxPrep 0, maxOverdue 0, maxInc 0, mcErrs 0, gcmErrs 0 Peak sync jitter -3/8, peak Rx sync delay 207, resyncs 0/0, no step interrupt scheduled VIN voltage: min 24.0, current 24.1, max 24.1 MCU temperature: min 23.4C, current 33.5C, max 33.5C Last sensors broadcast 0x00000002 found 1 209 ticks ago, 0 ordering errs, loop time 0 CAN messages queued 4938, send timeouts 0, received 2248, lost 0, free buffers 37, min 37, error reg 0 dup 0, oos 0/0/0/0, bm 0, wbm 0, rxMotionDelay 0 Accelerometer: LIS3DH, status: 00 I2C bus errors 0, naks 3, other errors 0Config.g
; General preferences G90 ; send absolute coordinates... M83 ; ...but relative extruder moves M550 P"V-Core3" ; set printer name M669 K1 ; CoreXY G21 ; Set Units to Millimeters ; Network M552 S2 ; enable network M586 P0 S1 ; enable HTTP M586 P1 S0 ; disable FTP M586 P2 S0 ; disable Telnet G4 S2 ; wait for expansion boards to start ; Drives M569 P0.0 S0 D2 ; Left Z physical drive 0.0 goes forwards M569 P0.1 S0 D2 ; Rear Z physical drive 0.1 goes forwards M569 P0.2 S0 D2 ; Right Z physical drive 0.2 goes forwards M569 P0.3 S1 D2 ; Right physical drive 0.3 goes forwards M569 P0.4 S1 D2 ; Left physical drive 0.4 goes forwards M569 P121.0 S1 D2 ; Extruder physical drive 0.5 goes forwards M584 X0.4 Y0.3 Z0.0:0.1:0.2 E121.0 ; set drive mapping M350 X16 Y16 Z16 E16 I1 ; configure microstepping with interpolation M92 X80.00 Y80.00 Z800.00 E400 ; set steps per mm M906 X1400 Y1400 Z1400 E600 I30 ; set motor currents (mA) and motor idle factor in per cent -- safe for Duet 3 mini 5+ M84 S30 ; Set idle timeout M566 X1000.00 Y1000.00 Z6.00 E120.00 P1 ; set maximum instantaneous speed changes (mm/min) M203 X30000.00 Y30000.00 Z1000.00 E3600.00 ; set maximum speeds (mm/min) M201 X12000.00 Y12000.00 Z100.00 E3600.00 ; set accelerations (mm/s^2) ; Axis Limits M208 X0 Y0 Z0 S1 ; set axis minima M208 X310 Y310 Z300 S0 ; set axis maxima ; Endstops M574 X1 S1 P"121.io2.in" ; configure active high endstops M574 Y2 S1 P"io1.in" ; configure active high endstops M671 X-4.5:150:304.5 Y-4.52:305:-4.52 S5 ; define positions of Z leadscrews or bed levelling screws M557 X20:280 Y20:280 P5 ; define 5x5 mesh grid ; Heaters M308 S0 P"temp0" Y"thermistor" T100000 B3950 A"Bed" ; configure sensor 0 as thermistor on pin temp0 M950 H0 C"out0" T0 Q10 ; Define Heater0 as the heated bed, bind to Sensor0 M140 H0 P0 ; Define Heated Bed M307 H0 A303.1 C356.7 D1.4 S1.00 V24.0 B0 ;M307 H0 R0.860 C439.9 D11.80 S1.00 B0 ; PID Tuning for Heater0, Heated Bed (45C) M143 H0 S110 ; Set temperature limit for Heater0 to 120C M308 S1 P"121.temp0" Y"thermistor" T100000 B4725 C7.060000e-8 A"Hotend" M950 H1 C"121.out0" T1 Q100 ; Define Heater1 as Extruder0 heater, bind to Sensor1 M307 H1 R3.075 K0.558:0.000 D4.86 E1.35 S1.00 B0 V24.0 ;M307 H1 R2.794 C119.4:105.8 D3.09 S1.00 V24.1 B0 ; PID Tuning for Heater1, Extruder0 (200C) ;M307 H1 A751.5 C196.6 D4.7 S1.00 V23.9 B0 M143 H1 S285 ; Set temperature limit for heater 1 to 285C ;M308 S2 P"temp2" Y"thermistor" A"Chamber" T100000 B4725 C7.060000e-8; Define Sensor2 as Chamber temperature (Semitec 104GT2) M308 S3 Y"mcu-temp" A"MCU" ; Define Sensor3 as the integrated MCU temperature sensor M308 S4 Y"drivers" A"TMC Drivers" ; Define Sensor4 as the TMC overheat sensor ; Fans M308 S2 Y"drivers" A"4028 Power" ; configure sensor 0 as thermistor on pin temp0 M950 H2 C"!out2" T2 Q10 ; Define Heater2 as the 4028 fan power, bind to Sensor2 M143 H2 P2 S200 ;M307 H2 I1 S1 ;M106 P2 C"4028 Power" S0 H-1 ; 4028 power using spare heater ;M950 F0 C"121.out1" Q500 ; create fan 0 on pin out4 and set its frequency M950 F0 C"!121.out1+out1.tach" Q25000 M106 P0 C"Layer Fan" S0 L0.0 X1.0 H-1 ;M106 P0 C"Layer Fan" S0 H-1 ; set fan 0 name and value. Thermostatic control is turned off ;M950 F1 C"out3" Q500 ; create fan 1 on pin out3 and set its frequency M950 F1 C"121.out2+out2.tach" Q500 ; Fan 1 uses out3, and using out3.tach as a tacho input M106 P1 C"Hotend Fan" S0 H1 T45 ; set fan 1 name and value. Thermostatic control turned on for Hotend ;M950 F1 C"out5" Q500 ; create fan 1 on pin out5 and set its frequency ;M106 P1 C"Hotend Fan" S0 H1 T45 ; set fan 1 name and value. Thermostatic control turned on for Hotend ; Tools M563 P1 D0 H1 F0 S"Mosquito Magnum" ; define tool 0 G10 P1 X0 Y0 Z0 ; set tool 0 axis offsets G10 P1 R190 S0 ; set initial tool 0 active 60C and standby temperatures to 0C ;M563 P0 H0 F0 S"Keenevo 600W Bed" ;G10 P0 X0 Y0 Z0 ;G10 P0 R50 S0 ; EVA 2 / BMG / E3D V6 ;M92 E400 ; set extruder steps per mm, 0.9 angle/step (LDO Pancake) ;M906 E800 ; set extruder motor current (mA) and idle factor in per cent ;M308 S1 P"temp1" Y"thermistor" T100000 B4725 C7.060000e-8 A"Hotend" ;; Run Heater PID Tune!! ;; M307 H1 A751.5 C196.6 D4.7 S1.00 V23.9 B0 ; Z-Probe ;; Inductive Probe ;M558 P5 C"io3.in" H5 F400 T5000 ; set Z probe type to unmodulated and the dive height + speeds M558 P8 C"121.io0.in" H5 F400 T5000 ; set Z probe type to unmodulated and the dive height + speeds G31 P1000 X-28 Y-15 Z0.79 ; set Z probe trigger value, offset and trigger height, more Z means closer to the bed ;G31 P500 X-30 Y-15 Z0 ;; BLTouch ; M950 S0 C"io7.out" ; Create a servo pin on io7 ; M558 P9 C"io7.in" H5 F240 T10800 A5 ; set Z probe type to unmodulated and the dive height + speeds ; G31 P25 X-28.00 Y-13.00 Z0.78 ; set Z probe trigger value, offset and trigger height, more Z means closer to the bed ;Accelerometer M955 P0 C"121.io2.out+121.io2.in" I54 ;Input Shaper ;M593 P"zvd" F41.9 ; for 10k acceleration ;M593 P"mzv" F41.9 ; for 15k acceleration ; Select default tool T0 ;Filament Sensor0 M591 D0 P3 C"121.io1.in" S1 M591 D0 L24 ;PanelDue 5i M575 P1 S1 B57600 ; Custom settings are not configured G29 S1 M572 D0 S0.10; set Pressure Advance K-factor M501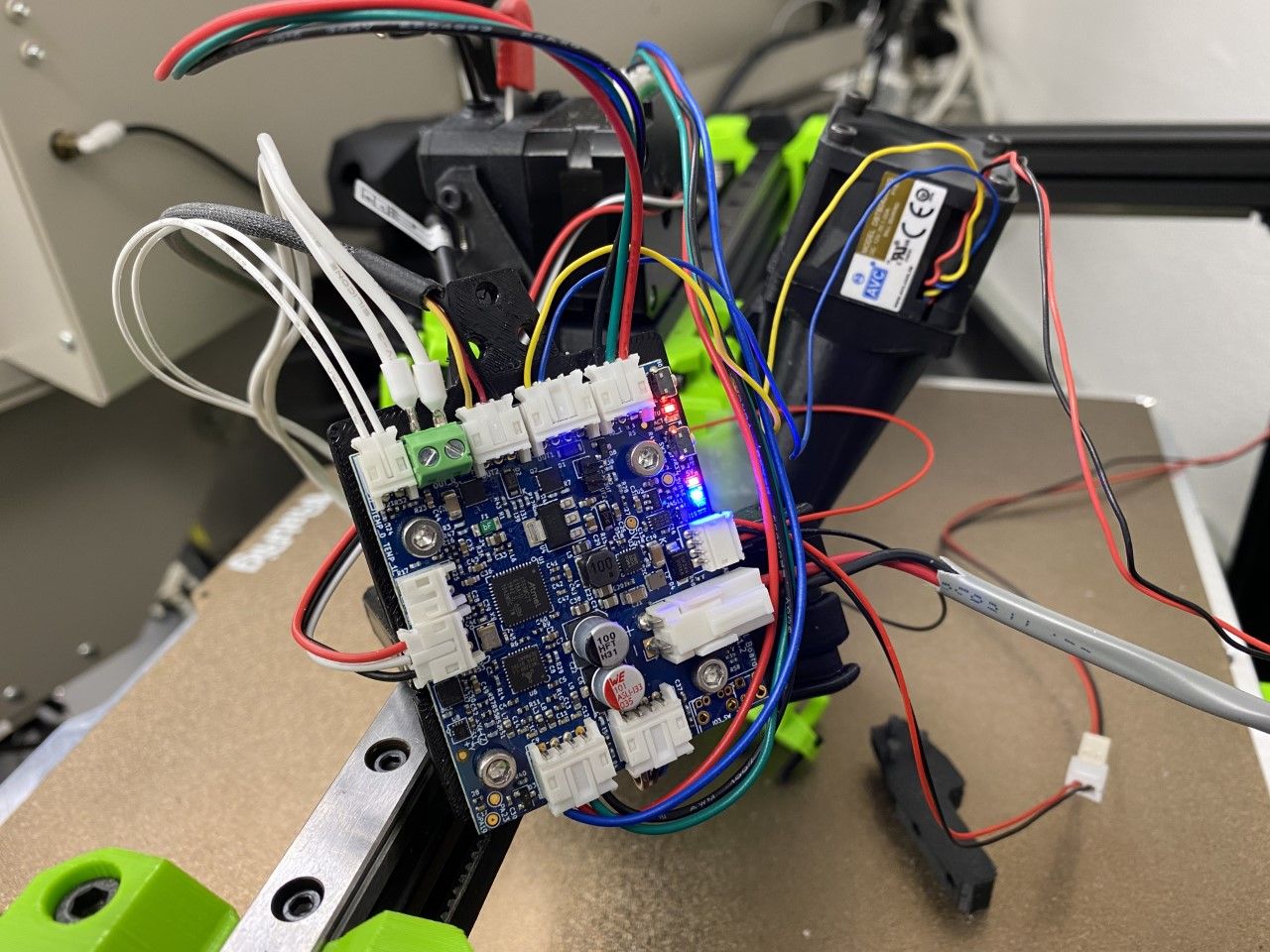
-
@rogerpodacter said in Toolboard 1LC "Port must be on mainboard":
M955 P0 C"121.io2.out+121.io2.in" I54
That is not how you configure the accelerometer built into the toolboard. From the docs:
To use an accelerometer on a CAN-connected expansion board, use the form Pboard-address.device-number for example P22.0.So in your case:
M955 P221.0 I54Should hopefully work. See: https://docs.duet3d.com/User_manual/Reference/Gcodes#notes-144
-
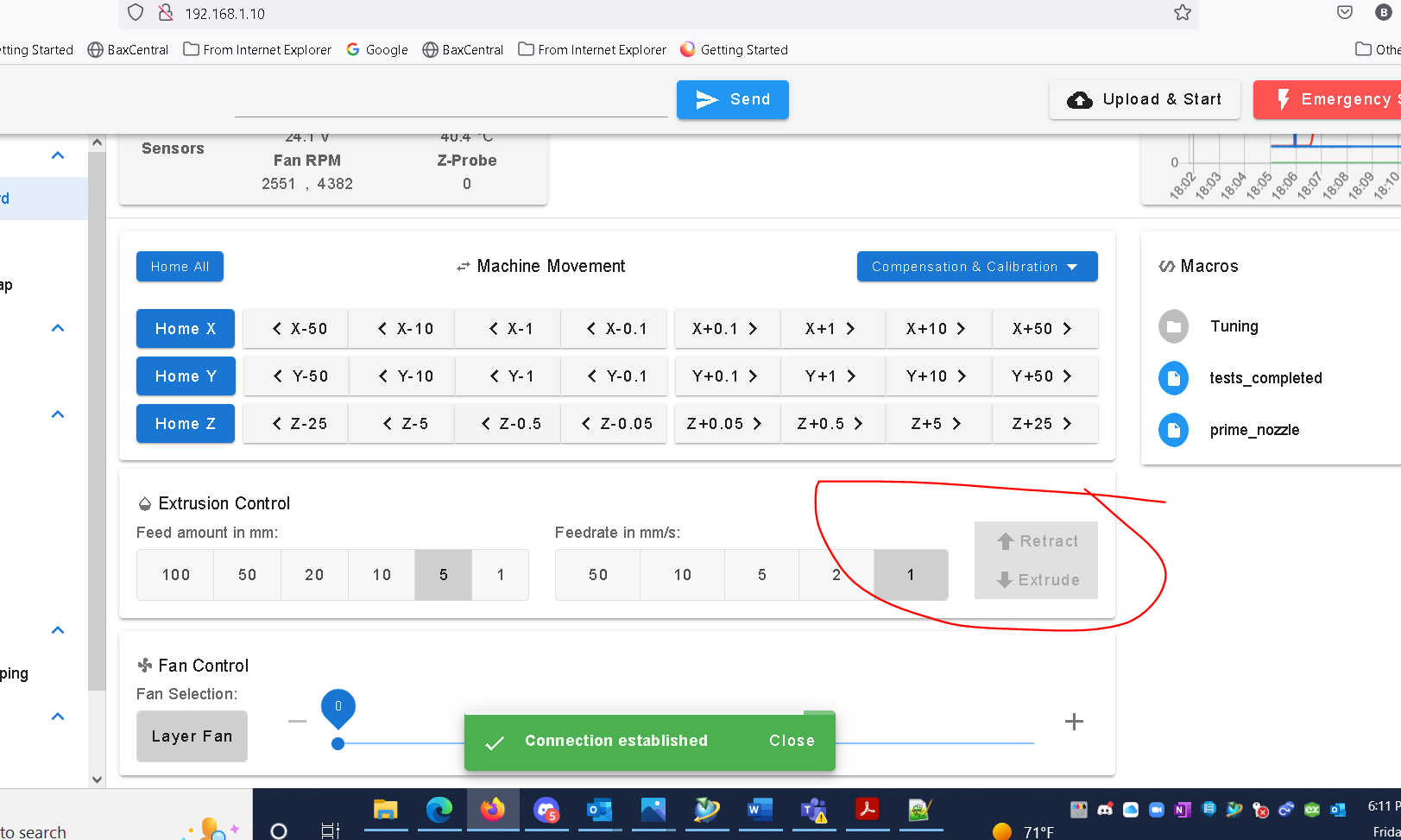
@gloomyandy Thanks, that removed that error but gave another one. but i wasnt clear in my original post. My extruder is the issue which does not work. When i bring up to temperature, i cannot extrude anything as the buttons are not active. Screenshot is below.
Also, the new error is now this:
EDIT: nevermind i fixed the accelerometer error by using M955 P121.0 I54. but i still have no extruder working.M98 P"config.g"
9/30/2022, 6:05:59 PM Error: Response timeout: CAN addr 93, req type 6034, RID=42 Warning: the height map was loaded when the current Z=0 datum was not determined by probing. This may result in a height offset. Warning: Macro file config-override.g not found
-
EDIT: deleted my config.g backup and the issue resolved itself. i've experienced that on a few occasions. i make a change and it does not take effect even after a reboot. one or 2 times later it finally takes hold.
@rogerpodacter now its even stranger. i ran a print job, and the extruder ran backwards, even though my wiring is identical to when it was connected to the mainboard.
M569 P121.0.0 S1 D2
So then i switched to this, and it still ran backwards.
M569 P121.0.0 S0 D2Either one of those run backwards, how is that possible?
-
@rogerpodacter is the toolboard running the right firmware?
Post the output ofM115andM115 B121 -
@rogerpodacter most likely the main board is starting up and sending commands to the tool board before the tool board has finished starting up.
-
Check that in config.g you have a delay command such as G4 S2 before the first command that refers to board 121 (which is probably your M569 command).
-
Also use M122 B121 to check which bootloader version the tool board has.
-