Bl Touch won't Z home
-
Hi
I finally could get into my Duet Web Page, then I try to send home X and Y is doing fine, but when it move to Z the Bl Touch won't develop. I'm using Duet3 mini +5 and the Firmware 3.4.4 I also try 3.4.5 same thing.
I ran Yat and send code M997 S1 and it says Duetwifiserver Bin not found ???Is there an specific version that I should use for Bl touch ????
-
 undefined Polo marked this topic as a question
undefined Polo marked this topic as a question
-
Thanks for your help , I finally had the time to go back to the printer and check all the wires and YES there was a wire that was loose, so when the table moves to the corner it get disconnected, that's the reason stop working, I checked it many times I missed it.
Let see if now I can print at least the benchy

-
@Polo
You've described two different issues here.
Based on the post title, I suggest focusing on getting the BL Touch working with the firmware you currently have.Please post the following details.
Use the </> button above to make it easier to read- your entire
config.g - The output from sending
M122in the console - The output from sending
M98 P"config.g"from the console - your entire
homez.gfile
- your entire
-
undefined Polo marked this topic as a regular topic
-
undefined Polo marked this topic as a question
-
This post is deleted! -
; General preferences G90 ; send absolute coordinates... M83 ; ...but relative extruder moves M550 P"V-Core3" ; set printer name M669 K1 ; CoreXY G21 ; Set Units to Millimeters ; Network M552 S1 ; enable network M586 P0 S1 ; enable HTTP M586 P1 S0 ; disable FTP M586 P2 S0 ; disable Telnet ; Drives M569 P0.0 S0 ; physical drive 0.0 goes forwards M569 P0.1 S0 ; physical drive 0.1 goes forwards M569 P0.2 S0 ; physical drive 0.2 goes forwards M569 P0.3 S1 ; physical drive 0.3 goes forwards M569 P0.4 S1 ; physical drive 0.4 goes forwards M569 P0.5 S0 ; physical drive 0.5 goes forwards M584 X0.4 Y0.3 Z0.0:0.1:0.2 E0.5 ; set drive mapping M350 X16 Y16 Z16 E16 I1 ; configure microstepping with interpolation M92 X80.00 Y80.00 Z800.00 ; set steps per mm M906 X1600 Y1600 Z1600 I30 ; set motor currents (mA) and motor idle factor in per cent -- safe for Duet 3 mini 5+ M84 S30 ; Set idle timeout M566 X400.00 Y400.00 Z6.00 E120.00 P1 ; set maximum instantaneous speed changes (mm/min) M203 X10800.00 Y10800.00 Z1000.00 E3600.00 ; set maximum speeds (mm/min) M201 X3000.00 Y3000.00 Z100.00 E3600.00 ; set accelerations (mm/s^2) ; Axis Limits M208 X0 Y0 Z0 S1 ; set axis minima M208 X510 Y500 Z500 S0 ; set axis maxima ; Endstops M574 X1 S1 P"io0.in" ; configure active high endstops M574 Y2 S1 P"io1.in" ; configure active high endstops M671 X-4.5:250:504.5 Y-4.52:505:-4.52 S5 ; define positions of Z leadscrews or bed levelling screws M557 X30:280 Y30:280 P5 ; define 5x5 mesh grid ; Heaters M308 S0 P"temp0" Y"thermistor" T100000 B3950 A"Bed" ; configure sensor 0 as thermistor on pin temp0 M950 H0 C"out0" T0 Q11 ; create bed heater output on out5 and map it to sensor 0, lower switching frequency to 11Hz M307 H0 B0 S1.00 ; disable bang-bang mode for the bed heater and set PWM limit M140 H0 ; map heated bed to heater 0 M143 H0 S110 ; set temperature limit for heater 0 to 110C ;; Run Bed PID Tune!! Below is an example for a 300x300 bed ;; M307 H0 A303.1 C356.7 D1.4 S1.00 V24.0 B0 ; Fans M950 F0 C"out4" Q500 ; create fan 0 on pin out4 and set its frequency M106 P0 C"Layer Fan" S0 H-1 ; set fan 0 name and value. Thermostatic control is turned off M950 F1 C"out3" Q500 ; create fan 1 on pin out3 and set its frequency M106 P1 C"Hotend Fan" S0 H1 T45 ; set fan 1 name and value. Thermostatic control turned on for Hotend ; Tools M563 P0 D0 H1 F0 ; define tool 0 G10 P0 X0 Y0 Z0 ; set tool 0 axis offsets G10 P0 R0 S0 ; set initial tool 0 active and standby temperatures to 0C M950 H1 C"out1" T1 ; create nozzle heater output on out2 and map it to sensor 1 M307 H1 B0 S1.00 ; disable bang-bang mode for heater and set PWM limit M143 H1 S250 ; set the maximum temperature in C for heater ; EVA 2 / BMG / E3D V6 M92 E830 ; set extruder steps per mm, 0.9 angle/step (LDO Pancake) M906 E800 ; set extruder motor current (mA) and idle factor in per cent M308 S1 P"temp1" Y"thermistor" T100000 B4725 C7.060000e-8 A"Hotend" ;; Run Heater PID Tune!! ;; M307 H1 A751.5 C196.6 D4.7 S1.00 V23.9 B0 ; Z-Probe ;; Inductive Probe ; M558 P5 C"!io3.in" H5 F400 T5000 ; set Z probe type to unmodulated and the dive height + speeds ; G31 P500 X-30 Y-15 Z0.20 ; set Z probe trigger value, offset and trigger height, more Z means closer to the bed ;; BLTouch M950 S0 C"io2.out" ; Create a servo pin on io7 M558 P9 C"io2.in" H5 F240 T10800 A5 ; set Z probe type to unmodulated and the dive height + speeds G31 P25 X-28.00 Y-13.00 Z0.90 ; set Z probe trigger value, offset and trigger height, more Z means closer to the bed ; Select default tool T0 ; Pressure Advance ; M572 D0 S0.10 ----------------------- M98 P"config.g" HTTP is enabled on port 80 FTP is disabled TELNET is disabled --------------------- M122 === Diagnostics === RepRapFirmware for Duet 3 Mini 5+ version 3.4.4 (2022-10-20 16:18:28) running on Duet 3 Mini5plus WiFi (standalone mode) Board ID: 5PQ93-S296U-D65J0-40KMG-1A03Z-7DGLP Used output buffers: 1 of 40 (28 max) === RTOS === Static ram: 103684 Dynamic ram: 110256 of which 264 recycled Never used RAM 27508, free system stack 200 words Tasks: NETWORK(notifyWait,14.7%,237) HEAT(notifyWait,0.0%,340) Move(notifyWait,0.0%,363) CanReceiv(notifyWait,0.0%,942) CanSender(notifyWait,0.0%,336) CanClock(delaying,0.0%,339) TMC(notifyWait,1.2%,115) MAIN(running,83.2%,425) IDLE(ready,0.0%,30) AIN(delaying,0.9%,263), total 100.0% Owned mutexes: === Platform === Last reset 00:42:19 ago, cause: software Last software reset at 2023-05-06 13:38, reason: User, GCodes spinning, available RAM 27424, slot 2 Software reset code 0x0003 HFSR 0x00000000 CFSR 0x00000000 ICSR 0x00000000 BFAR 0xe000ed38 SP 0x00000000 Task MAIN Freestk 0 n/a Error status: 0x00 MCU revision 3, ADC conversions started 2539781, completed 2539781, timed out 0, errs 0 Step timer max interval 1472 MCU temperature: min 37.8, current 38.6, max 39.1 Supply voltage: min 26.9, current 27.0, max 27.1, under voltage events: 0, over voltage events: 0, power good: yes Heap OK, handles allocated/used 0/0, heap memory allocated/used/recyclable 0/0/0, gc cycles 0 Events: 0 queued, 0 completed Driver 0: standstill, SG min 0, read errors 0, write errors 0, ifcnt 37, reads 31813, writes 2, timeouts 0, DMA errors 0, CC errors 0 Driver 1: standstill, SG min 0, read errors 0, write errors 0, ifcnt 37, reads 31814, writes 2, timeouts 0, DMA errors 0, CC errors 0 Driver 2: standstill, SG min 0, read errors 0, write errors 0, ifcnt 37, reads 31814, writes 2, timeouts 0, DMA errors 0, CC errors 0 Driver 3: standstill, SG min 0, read errors 0, write errors 0, ifcnt 37, reads 31813, writes 2, timeouts 0, DMA errors 0, CC errors 0 Driver 4: standstill, SG min 2, read errors 0, write errors 0, ifcnt 37, reads 31813, writes 2, timeouts 0, DMA errors 0, CC errors 0 Driver 5: standstill, SG min 0, read errors 0, write errors 0, ifcnt 31, reads 31814, writes 2, timeouts 0, DMA errors 0, CC errors 0 Driver 6: standstill, SG min 0, read errors 0, write errors 0, ifcnt 29, reads 31816, writes 0, timeouts 0, DMA errors 0, CC errors 0 Date/time: 2023-05-06 14:20:56 Cache data hit count 4294967295 Slowest loop: 7.23ms; fastest: 0.13ms === Storage === Free file entries: 10 SD card 0 detected, interface speed: 22.5MBytes/sec SD card longest read time 3.2ms, write time 0.0ms, max retries 0 === Move === DMs created 83, segments created 0, maxWait 0ms, bed compensation in use: none, comp offset 0.000 === MainDDARing === Scheduled moves 0, completed 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1 === AuxDDARing === Scheduled moves 0, completed 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1 === Heat === Bed heaters 0 -1 -1 -1, chamber heaters -1 -1 -1 -1, ordering errs 0 Heater 1 is on, I-accum = 0.0 === GCodes === Segments left: 0 Movement lock held by null HTTP is idle in state(s) 0 Telnet is idle in state(s) 0 File is idle in state(s) 0 USB is idle in state(s) 0 Aux is idle in state(s) 0 Trigger is idle in state(s) 0 Queue is idle in state(s) 0 LCD is idle in state(s) 0 SBC is idle in state(s) 0 Daemon is idle in state(s) 0 Aux2 is idle in state(s) 0 Autopause is idle in state(s) 0 Code queue is empty === CAN === Messages queued 22613, received 0, lost 0, boc 0 Longest wait 0ms for reply type 0, peak Tx sync delay 0, free buffers 18 (min 18), ts 12563/0/0 Tx timeouts 0,0,12563,0,0,10050 last cancelled message type 30 dest 127 === Network === Slowest loop: 100.80ms; fastest: 0.06ms Responder states: HTTP(0) HTTP(0) HTTP(0) HTTP(0) FTP(0) Telnet(0) HTTP sessions: 1 of 8 = WiFi = Network state is active WiFi module is connected to access point Failed messages: pending 0, notready 0, noresp 2 WiFi firmware version 1.27 WiFi MAC address d8:bf:c0:14:e8:37 WiFi Vcc 3.38, reset reason Power up WiFi flash size 2097152, free heap 24968 WiFi IP address 192.168.1.134 WiFi signal strength -41dBm, mode 802.11n, reconnections 0, sleep mode modem Clock register 00002002 Socket states: 0 0 0 0 0 0 0 0; BLTouch ;M280 P0 S160 ; Precautionary alarm release ;M280 P0 S90 ; Ensure the pin is raised G91 ; Relative positioning G1 H2 Z5 F6000 ; Lift Z relative to current position G90 ; Absolute positioning G1 X250 Y250 F10000 ; Go to the center of the bed (300x300) ;G1 X200 Y200 F10000 ; Go to the center of the bed (400x400) ;G1 X250 Y250 F10000 ; Go to the center of the bed (500x500) G30 ; Home Z by probing the bed ; Uncomment the following lines to lift Z after probing ;G91 ; Relative positioning ;G1 Z5 F100 ; Lift Z relative to current position ;G90 ; Absolute positioningPlease Let me know if I'm missing something
Thanks
-
@Polo
I don't have a mini 3 to compare with but..
It looks like you've neglected too to define a Z end stop withM574.
The configuration tool gives me; Endstops M574 X1 S1 P"io0.in" ; configure switch-type (e.g. microswitch) endstop for low end on X via pin io0.in M574 Y1 S1 P"io1.in" ; configure switch-type (e.g. microswitch) endstop for low end on Y via pin io1.in M574 Z1 S2 ; configure Z-probe endstop for low end on Z ; Z-Probe M950 S0 C"io3.out" ; create servo pin 0 for BLTouch M558 P9 C"io3.in" H5 F120 T6000 ; set Z probe type to bltouch and the dive height + speeds G31 P500 X-28 Y-13 Z0.9 ; set Z probe trigger value, offset and trigger heightThe tool doesn't allow me to select io2.in as the pin to use for the BL Touch, but that may just be how it's programmed. As long as the BL Touch is wired correctly I see no reason why you couldn't use io2.in
Try adding
M574 Z1 S2 ; configure Z-probe endstop for low end on ZIf you still can't access DWC then it might be best that you back up the contents of your SD card and then run the configuration tool to create a fresh config and get the latest firmware.
That should ensure that other needed files likedeploypobe.gandretractprobe.gand present and properly configured
It seems like you've moved from an inductive probe, so these could be missing or incorrect as well. -
If you send M401 and M402 does the pin deploy and retract?
Does the pin deploy and retract during the startup self test?
io3 should be a fine port to use, can you show a photo of how it's connected? -
when I use M401 or M402 on my DWC it wont respond doesn't respond to my commands
Does the pin deploy and retract during the startup self test? YES it develop and retract
here is a picture
I guess is something wrong with my firmware. I check the wires many times and check continuity and sems to be fine.
-
I tried the M574 but still didn't work, Why when I do an Firmware update it only change on my machine specification and General tab stay last version ???? is this normal
Here is a picture
last week I did update and it works, but now again the same problem that's why I assume is something wrong with my Firmware ???
-
You have an error message there that says it's missing the macros folder from the root of the SD card. Can you show us a screenshot of your SD card folder structure?
If M401 and M402 do not work, can you confirm that you have deployprobe.g and retractprobe.g located in the sys folder on the SD card? What do you have in those files?
I also notice that your DWC version is 3.4.4 but firmware version is 3.4.5. So I suggest you try updating everything again this time by uploading this zip file to the system tab in DWC. That should get everything up to date.
https://github.com/Duet3D/RepRapFirmware/releases/download/3.4.5/Duet2and3Firmware-3.4.5.zip
-
Hi thanks to respond !!
My biggest mistake happen when by mistake I erase all the information from my SD card so I had to start all over again. I missing the macros folder.
I already change my Firmware and went back to 3.3.0 and finally the bl touch probe respond, I send it home and was fine then I run the bed leveling went to one of the corner of the bed and again stop responding and when this happen I can't make it to work again. I'm really confuse, this happened to me a few times. Here is some information of my SD card; deployprobe.g ; Called to deploy a physical Z probe ; M280 P0 S10 ; Deploy the BLTouch pin; retractprobe.g ; Called to retract a physical Z probe ; M280 P0 S90 ; Retract the BLTouch pin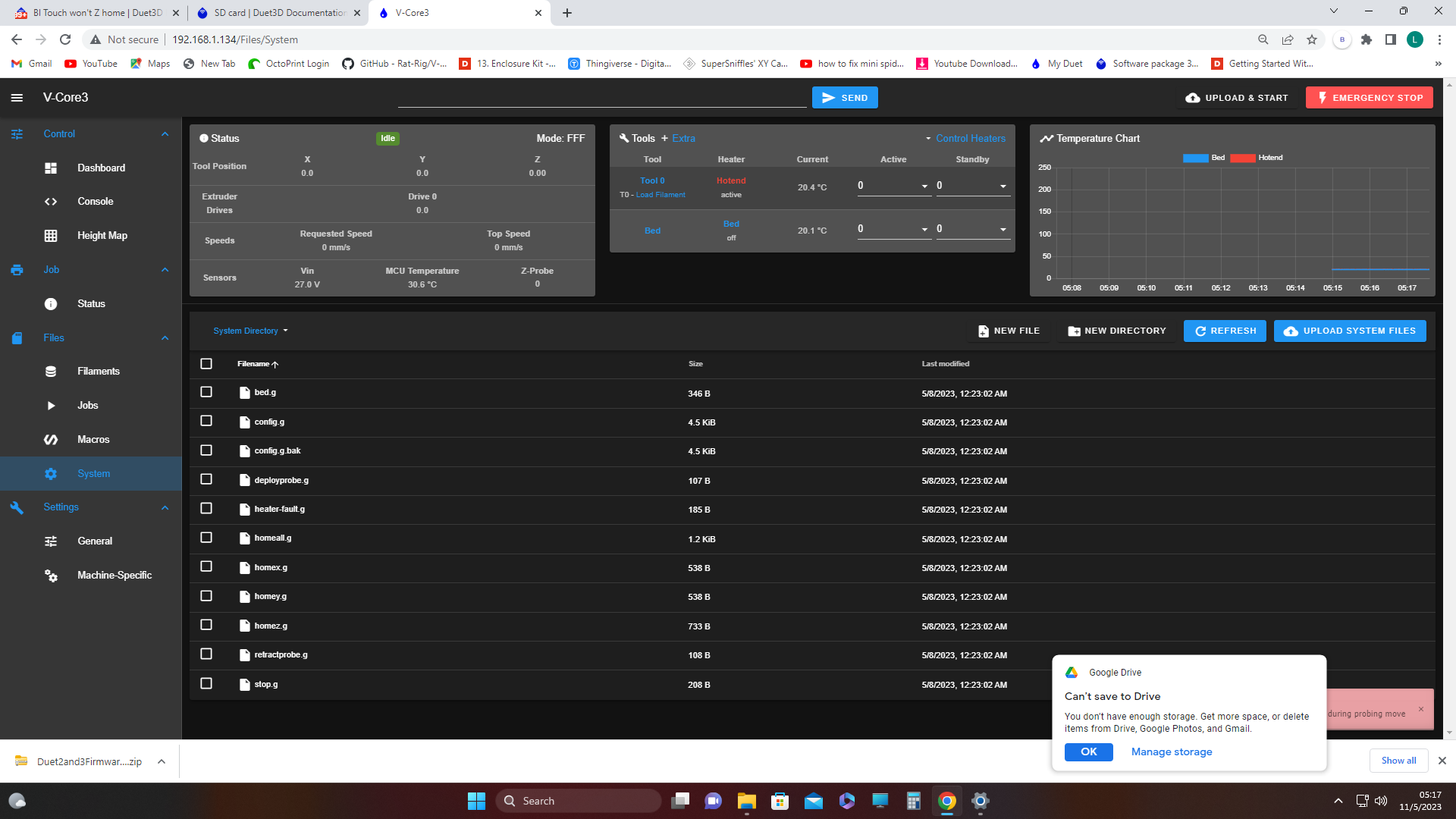
-
@Polo said in Bl Touch won't Z home:
I send it home and was fine then I run the bed leveling went to one of the corner of the bed and again stop responding and when this happen I can't make it to work again.
What exactly do you mean stop responding?
-
it goes to one corner of the bed and expand touch the bed then retract as normal, then go to the other corner and stay retracted it wont expand and then crash into the bed.
once that happen I turn the printer off and on send it home X and Y is ok then move to the center of the bed and Bl touch wont do anything. stay retracted . -
Check the cables of the BLTouch. Sounds like the servo wire may have a partial break.
-
Thanks for your help , I finally had the time to go back to the printer and check all the wires and YES there was a wire that was loose, so when the table moves to the corner it get disconnected, that's the reason stop working, I checked it many times I missed it.
Let see if now I can print at least the benchy
-
undefined Polo has marked this topic as solved