3.5.0-rc.1 Brakes not engaging
-
@p8blr i found the same result , but reboot printer take some MS to active brake and the head go down during this time

-
@dc42
this is still persistent in 3.5.2my brake is on
out8of Duet3 6HC in SBC modeProduct Short Name Version Duet 3 MB6HC MB6HC 3.5.2 Duet 3 Expansion MB6XD MB6XD 3.5.2 Duet Software Framework DSF 3.5.2 Duet Web Control DWC 3.5.2the brake is configured with
M569.7 P2 C"out8"brake is engaged when not powered
brake is disengaged when powered- after power on, the brake is engaged (not powered)
M569.7 P2 C"out8"in config.g - after G92 Z300, nothing changed
- after G91 G1 Z-0.05, the brake is disengaged (powered)
- after M17 Z, the brake is still disengaged (powered)
- after M18 Z, the brake is still disengaged (powered)
- after doing
M569.7 P2 C"out8"again, the brake is now engaged (not powered) - so the logic is now inverted - after M18 Z, the brake is still engaged (not powered)
- after G92 Z300, still engaged
- after G91 G1 Z-0.05 still engaged (it is not possible to move the axis or disengage the brake)
- reapplying
M569.7 P2 C"out8"will not change the logic again - applying
M569.7 P2 C"!out8"will change the logic again
so it seams, that the functions
EngageBrakeandDisengageBrakeare not working as expected.
I've tried to find the bug in the code, but was unable to get it. The functions are pretty straigt forward. The only thing that caught my attention was the pin access modePinAccess::write0and the new PWM voltage divider.if (!brakePorts[driver].AssignPort(gb, reply, PinUsedBy::gpout, PinAccess::write0)) { return GCodeResult::error; }but anyhow I don't know if this should be PinAccess::pwm
Another thing is the following inside EngageBrake
#if SUPPORT_BRAKE_PWM currentBrakePwm[driver] = 0.0; #endifif this is not forwared to the Spin() Method - the brake will get disengaged again.
- after power on, the brake is engaged (not powered)
-
-
@timschneider thanks for the update. I have created https://github.com/Duet3D/RepRapFirmware/issues/1023.
closed M17 doesn't re-engage motor brake #1023
-
Also @Amagatth, regarding your thread https://forum.duet3d.com/topic/35935/controle-nema-23-brake, see @dc42's post above.
Ian
Bed-slinger - Mini5+ WiFi/1LC | RRP Fisher v1 - D2 WiFi | Polargraph - D2 WiFi | TronXY X5S - 6HC/Roto | CNC router - 6HC | Tractus3D T1250 - D2 Eth
-
-
@timschneider thx i try to put your file but i am on 3.5.2 it work ?
-
@Amagatth
yes this is for 3.5.2 and the brake connected to MB6HCanyhow, I've applied the patch from @dc42 on RRF to use WriteAnalog and this works.

src/Platform/Platform.cpp | 4 +++- 1 file changed, 3 insertions(+), 1 deletion(-) diff --git a/src/Platform/Platform.cpp b/src/Platform/Platform.cpp index 874b75ac..f3c2f560 100644 --- a/src/Platform/Platform.cpp +++ b/src/Platform/Platform.cpp @@ -2732,8 +2732,10 @@ void Platform::EngageBrake(size_t driver) noexcept { #if SUPPORT_BRAKE_PWM currentBrakePwm[driver] = 0.0; -#endif + brakePorts[driver].WriteAnalog(0.0); +#else brakePorts[driver].WriteDigital(false); // turn the brake solenoid off to engage the brake +#endif } void Platform::DisengageBrake(size_t driver) noexcept@p8blr
this is the file for the 6XD with WriteAnalog(0.0)
Duet3Firmware_MB6XD.bin -
@timschneider thx for the file i apply it
-
@Amagatth it work ! now m18 engage break !
-
-
@timschneider I tried that file but it seems to have messed everything up. Now what do I do?
@dc42 When will this issue be fixed? I've also noticed that remapping drives do different axes messes up the brake control as well. Only a reboot will fix.
-
@p8blr
hi maybe you try the 3.5.3 rc-1 the fix is includedhttps://github.com/Duet3D/RepRapFirmware/releases/tag/3.5.3-rc.1
M17 did not energise the motor brake solenoid (issue 1023) -
@timschneider I just setup a new image again and M997 S2 F"unstable" doesn't work, sudo apt update, sudo apt upgrade doesn't update the firmware, neither does M997 B0. How do I do this? I don't see any documentation of the sort.
-
@dc42 M997 S2 V"3.5.3-rc.1" gives "could not find reprapfirmware package....." on a brand new image. Why is this happening?
-
have you switched from the stable to the unstable package feed?
-
@jay_s_uk Isn't that what M997 S2 F"unstable" does?
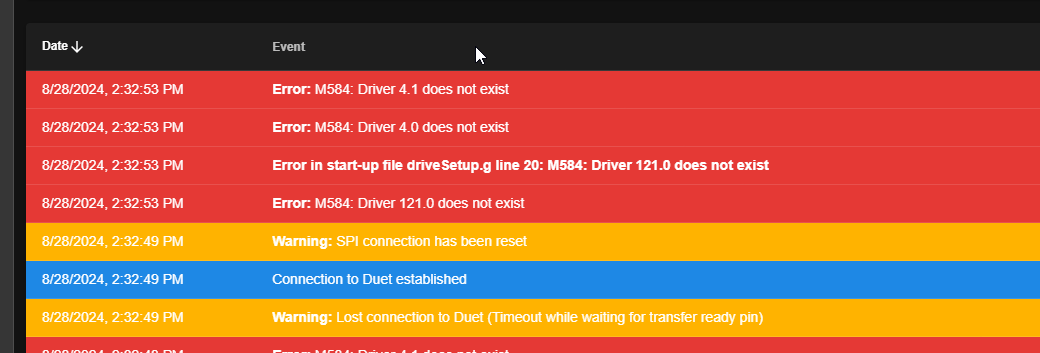
@dc42 I ditched the Raspberry Pi for the moment, and connected via usb and used a SD card and YAT to update to the 3.5.3-RC-1, that worked fine. All board up to date, but after I connected my raspberry pi, and uploaded my original config file, now I get the same errors I had after updating in my last post. SPI connection reset, lost connection to duet. Keep in mind the printer was working fine with the same config file for ages up until the upgrade and there have been no hardware changes. Also in SBC mode my can bus lights don't blink right.
-
@p8blr said in 3.5.0-rc.1 Brakes not engaging:
M997 S2 V"3.5.3-rc.1"
I think that should beI'm wrong, sorry!M997 S2 V"3.5.3.rc.1"Ian
-
@p8blr yes, the F should switch you over (not tried it though)
-
@p8blr
can you send us the output of
M98 P"config.g"maybe there is a bug in the config, as it appears to me, that was created for an older version of RRF. As stated in the config, it was created for
Firmware Version 3.5.0 Release Candidate 1, since then there have been a few incompatible changes.
