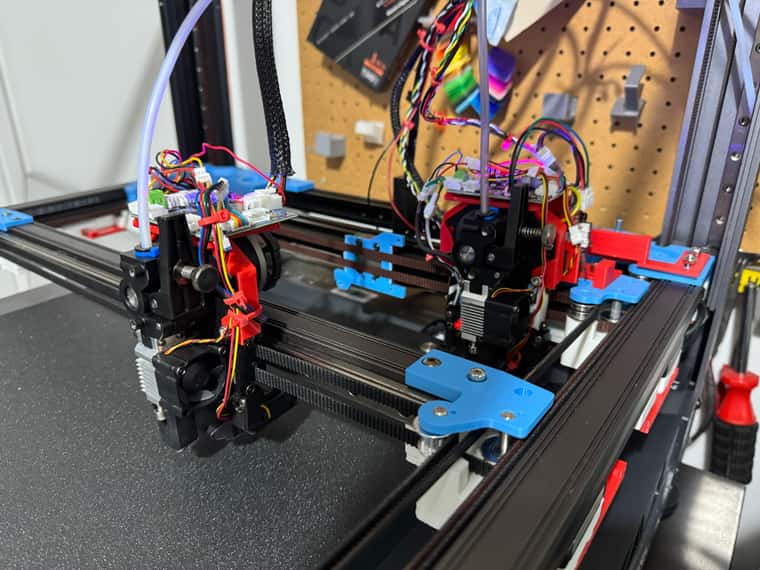
Sovol SV08 Multiple Motion System Upgrade.
-
End stops now working on U & V axis - so the next thing I need to work out is how to home Z - I have 2 x Z probes and depending on how the Flying Gantry has settled either one or the other triggers first.
Ideally I would like a way of Z homing where it tries to home - and stops if either of the probes are triggered, perhaps with one gantry right at the front and the other at the back.
I tried specifying both as switches in a M574 - but it didn't like it.
Then I guess what I would like to do is then joggle around the front and rear Z axis motors until both probes trigger very close to each other.
I can't work out how to do this at the moment, so in the meantime I think I will Z home on the rear probe, but move it is close to the front probe first - so that the front gantry doesn't hit the bed if it is lower.
Will then try 4 Z motor adjustment.
Probably also need to put in some basic method of avoid the heads or gantries being able to move in to each other in normal ad hoc moves if that's possible.
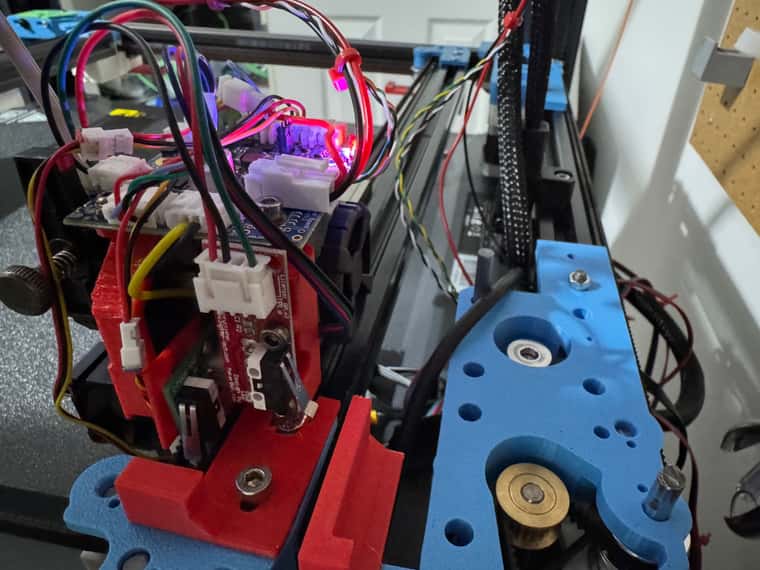
U & V end stops both put in the 1LC driver board - which saves on wiring - but does mean U has to be homed first - otherwise the V end stop won't hit the plate I setup for it.
-
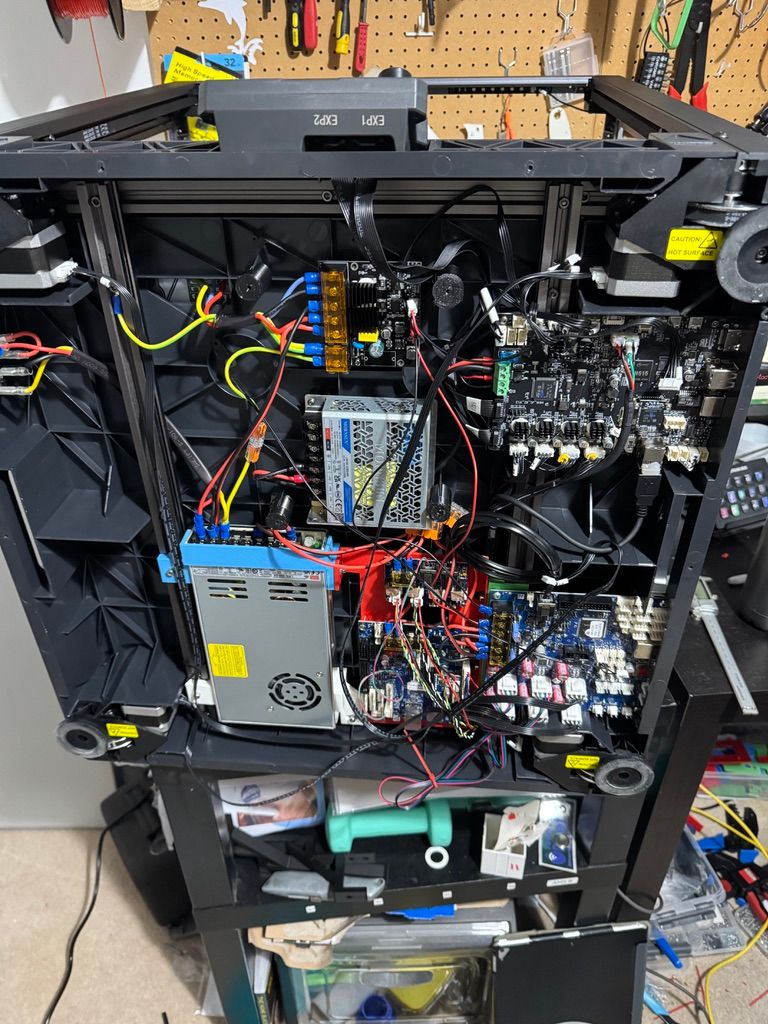
@dwuk Upgrade PSU to a meanwell one - I can see why people seem to like them - its almost silent, rather than being really noisy like the previous one.
I think I might be getting somewhere with my homing
Based on here
https://docs.duet3d.com/User_manual/Connecting_hardware/Z_probe_auto_levelling#axis-levelling-using-endstopsI think I might have to split my 4xZ motors in to 2 separate AXIS (back and front), then move the two gantries to the back and front, then allocate the two probes to the two separated Z Axis, and then move down on both axis down at the same time - and hopefully it will move down until both probes are triggered.
-
Think I have figured a way to get the Z motors level.
Step 1 - Define an extra AXIS A in Config.g with same parameters as Z - but set to a dummy drive and switch.
Step 2 - Align Back and Forward.
Move front gantry to near front centre and rear gantry to near rear centre
;Set Z axis to Probe 0 - front gantry
M574 Z1 S2 K0
;Set A axis to Probe 1 - rear gantry
M574 A1 S2 K1
;Split Gantries - front and back
M584 Z2:5 A0:1 P6
;Move both gantries down until they hit their probes
G91
G1 H1 Z-999 A-999Step 3 - Align Left and Right
; Now Move Gantries close to each other in the centre of the bed,
; Plus move rear gantry print head to near to the left and front to near to the right; Resplit Axis - with A left and Z right
M584 Z1:5 A0:2 P6; Now Move down to end stops again
G91
G1 H1 Z-999 A-999; Now all 4 z's are I think closer to alignment.
Step 4 - Re Merge Z
M584 Z1:2:0:5 P5 -
Homing working -
See short video demo
https://youtube.com/shorts/oHtVsdHTPQc?si=w-lnOgmzNzxqfvRK
Lots of refinements to do - but basic homing and 4 AXIS levelling done
-
Tuned heaters today. The heads worked ok, got this from the print bed
28/01/2025, 11:29:21 Warning: heater behaviour was not consistent during tuning
Auto tuning heater 0 completed after 3 idle and 25 tuning cycles in 4667 seconds. This heater needs the following M307 command:
M307 H0 R0.527 K0.163:0.000 D5.70 E1.35 S1.00 B0
Edit the M307 H0 command in config.g to match this. Omit the V parameter if the heater is not powered from VIN.Will try using it anyway to see what happens.
Also decided to try backing up settings today - tried various methods and ended up using FTP with VSCODE. Annoyingly I some how ended up losing my HomeX,Y,Z and All settings - so had to re do them.
Improved the Z homing as part of this.Now ready to try some mesh levelling.
-
Gradually getting there with bed levelling.
Found my two probes trigger at slightly different heights, plus the nozzles are also at different heights too - so will add some manual adjustment capability in before trying first print.I can't get auto 4 axis calibration to work - it keeps saying it is not supported for the kinematics. I've tried coreXY too and it still says the same thing.
So I have settled for now on probing and a level of auto adjustment in bed.g that seems to work.
My HomeZ does still seem to mess up the gantry levelling, and I am getting some issues with probes getting stuck on in the software.
But I think with this bed.g I now have a pretty flat Z axis after a few iterations.
M671 X410:-60:-60:410 Y420:-10:420,-10 M400 while true G1 X300 Y200 F20000 G30 P0 X300 Y200 Z-99999 ; probe near a leadscrew var adjust1 = (sensors.probes[0].lastStopHeight) G1 X20 Y20 F20000 G30 P1 X20 Y20 Z-99999 ; probe near a leadscrew var adjust2 = (sensors.probes[0].lastStopHeight) G1 X20 Y200 F20000 G30 P2 X20 Y200 Z-99999 ; probe near a leadscrew var adjust0 = (sensors.probes[0].lastStopHeight) G1 X300 Y20 F20000 G30 P3 X300 Y20 Z-99999 S-1 ; probe near a leadscrew and calibrate 4 motors var adjust5 = (sensors.probes[0].lastStopHeight) echo var.adjust1, var.adjust2, var.adjust0, var.adjust5 if (abs(var.adjust1) < 0.01 && abs(var.adjust2) < 0.01 && abs(var.adjust0) < 0.01 && abs(var.adjust5) < 0.01) || iterations > 6 break G91 if abs(var.adjust1) < 1 set var.adjust1 = var.adjust1 * 2 if abs(var.adjust2) < 1 set var.adjust2 = var.adjust2 * 2 if abs(var.adjust1) < 1 set var.adjust0 = var.adjust0 * 2 if abs(var.adjust1) < 1 set var.adjust5 = var.adjust5 * 2 M584 A1 P6 G1 A{var.adjust1} M584 A2 P6 G1 A{var.adjust2} M584 A0 P6 G1 A{var.adjust0} M584 A5 P6 G1 A{var.adjust5} M400 G1 Z0 F2000 G92 Z2.55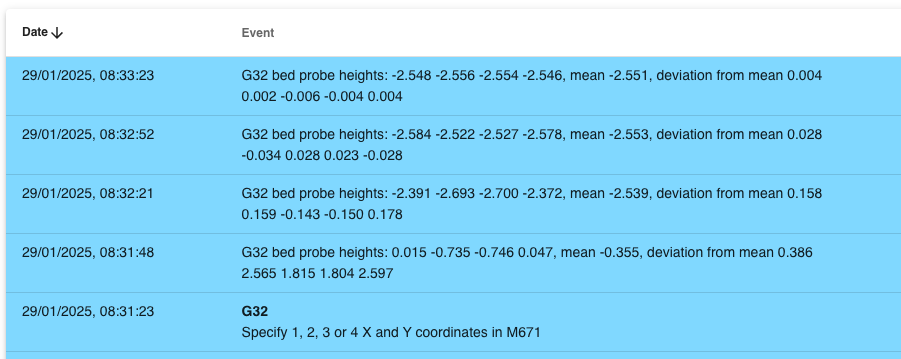
-
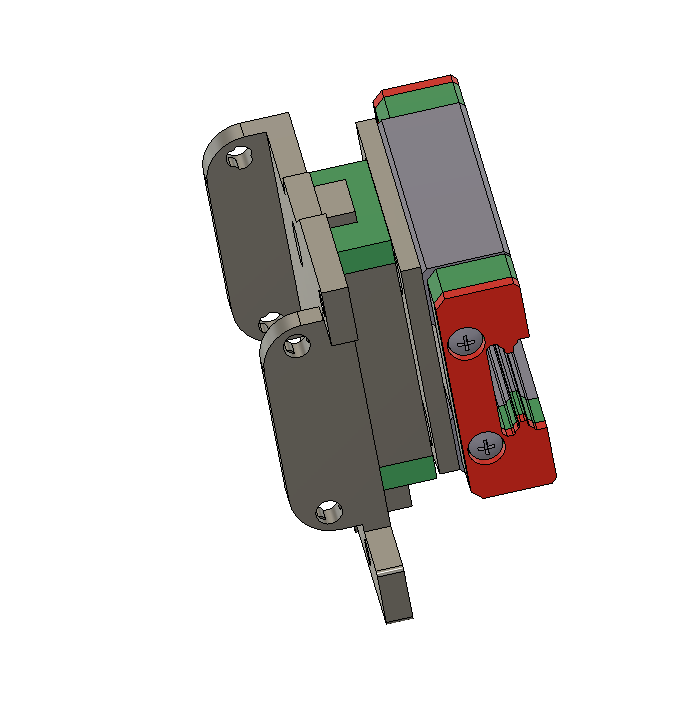
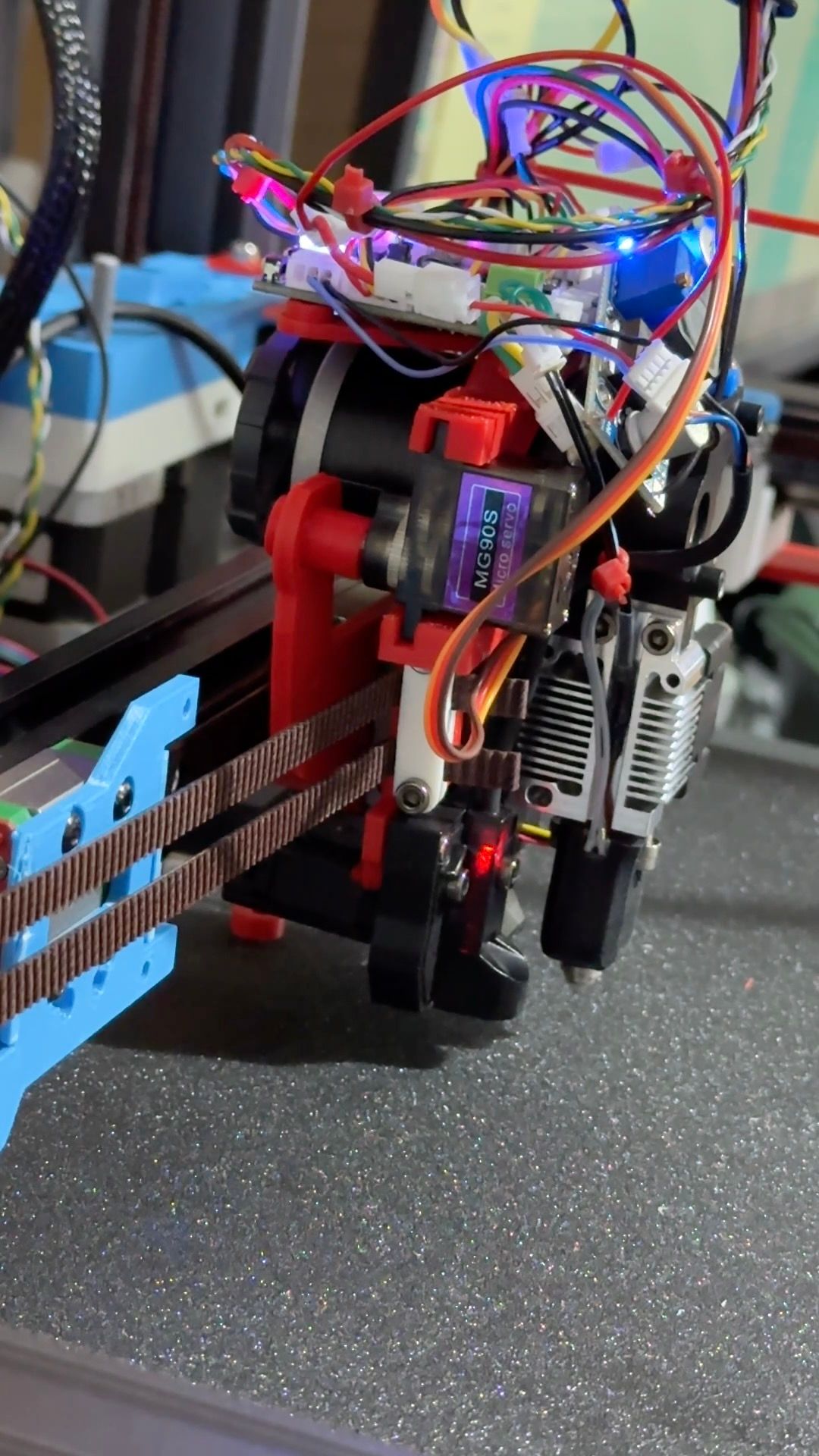
Current thinking on first Z Hopper prototype
an MG90S servo - for Z offset, first layer meshing and Z hopping only for other layers.
The mechanism will unfortunately add another around 10mm to the depth of the extruder due to the tiny MGN7 linear rail.
I don't think the 1LC board 5V can handle the stall current of about 700ma - so will add a buck convertor onto the 24v input supply. Will put the servo on IO-0.out on the 1LC.
-
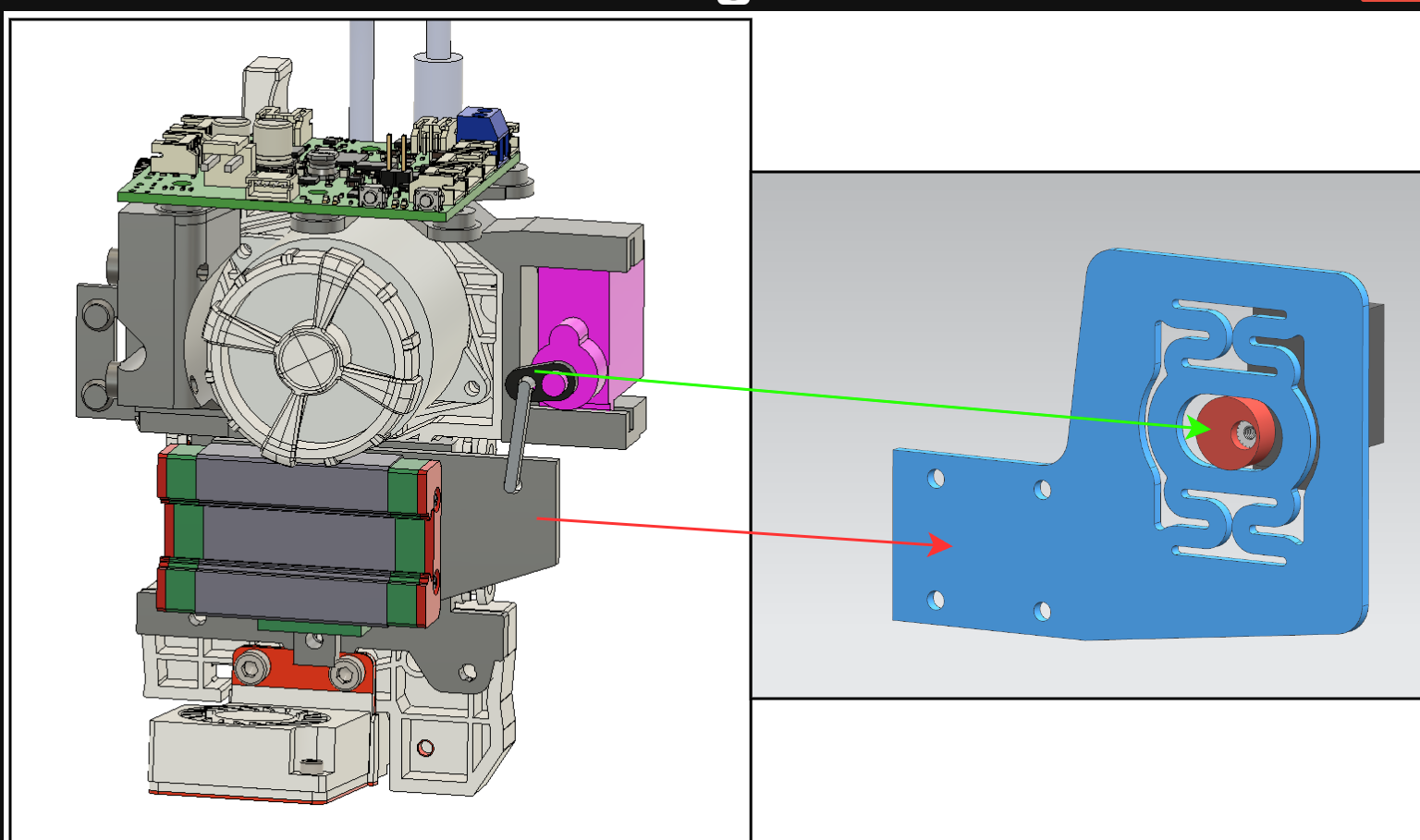
@dwuk Hi David,
I did a quick sketch to show you the cam concept. I can't upload a photo, so I put the link below. You should erase the spaces.
I tried to use arrows to explain which part is which.
You should add a mechanical switch to limit the lower Z position of the extruder. When the extruder reaches the lower Z limit, the spring should have slight tension—this will likely provide sufficient accuracy.
Additionally, if you add a screw to adjust the lower Z limit, you can fine-tune the adjustment to ensure both extruders are on the same plane.
https :// freeimage . host / i/2Qk9jcl
-
@_MRT_ Thanks very clever- like it.
Especially the fact that is should allow more precision and also the servo motor will not need to take the full weight in its rotational axis. Will add limit switch in too as you suggest.
Have added a screenshot of your photo below.
-
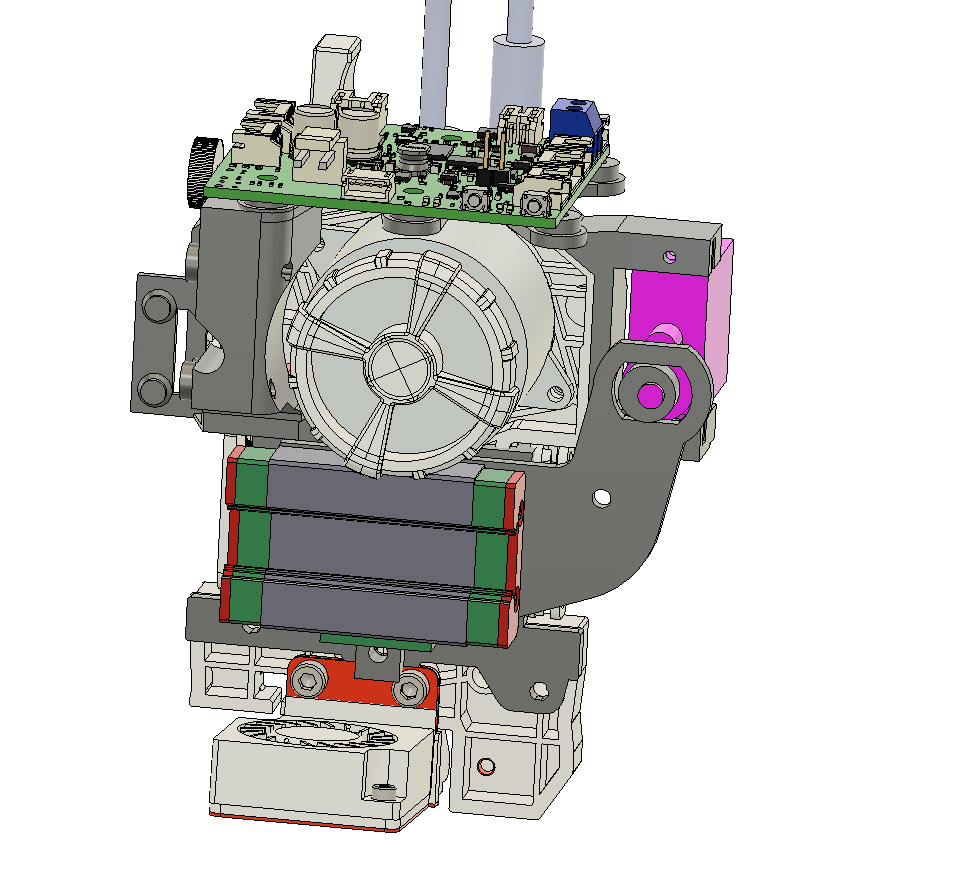
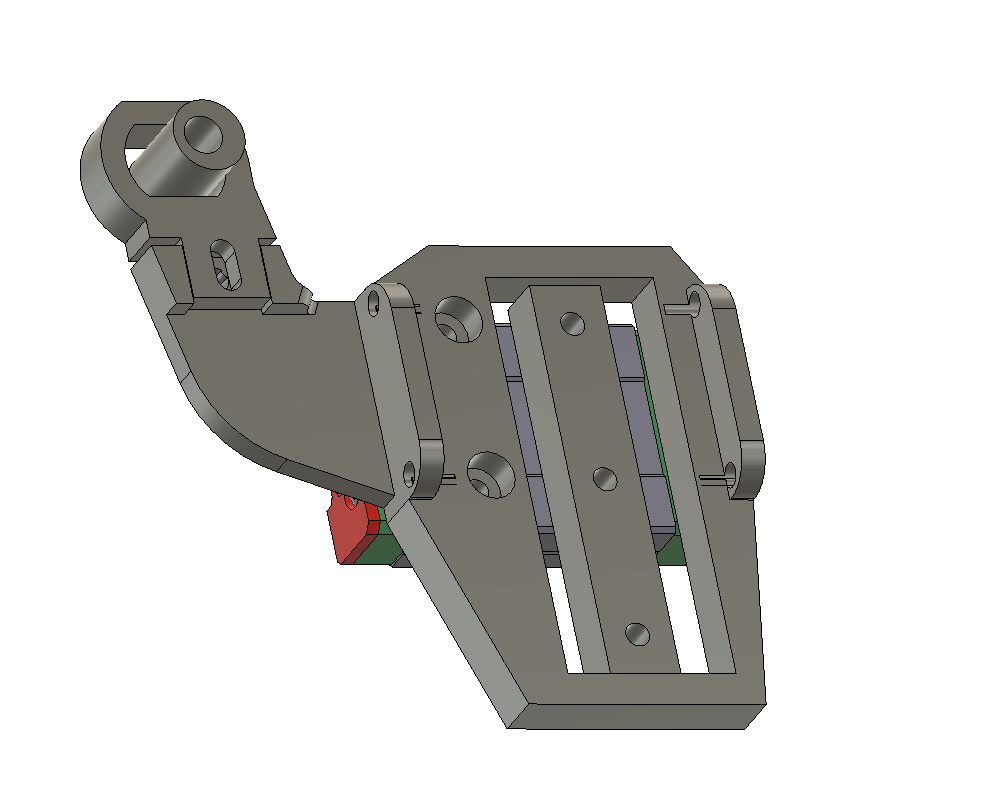
@dwuk Basic rigid Cam version created for first test.
Will then experiment with adding springs as suggested by @_MRT_
Need however to limit the width as much as possible to avoid clashes with the other head on the same gantry. I guess I could move the servo and cam onto the other side and reposition the X end stop.
The Cam is offset 0.75mm from the centre of the shaft - so I am guessing this means about 1.4mm of movement within the range of about 140 degrees of the servo.
Will add in screw height adjustment and end stop later.
-
@dwuk Servo wired up and tested. On the 1LC board io_0.out, with an LM2596 DC to DC convertor to bring down the 24V input to 5V for the servo.
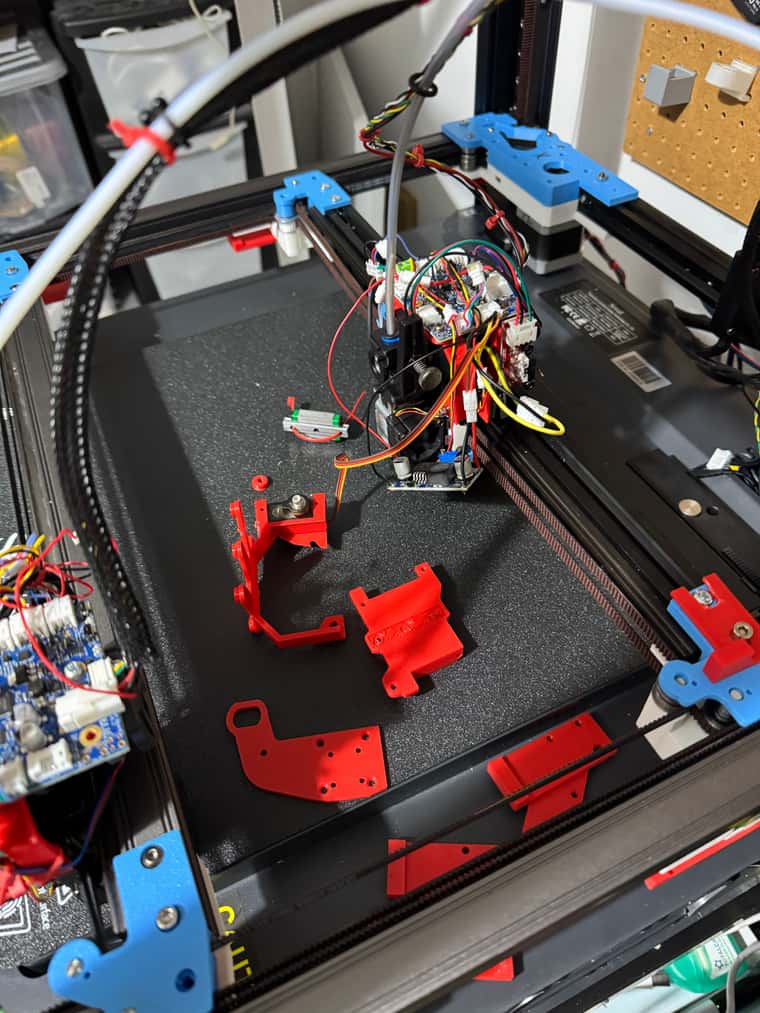
Prototype parts printed - just need to install them and test them - might be a few days due to other commitments.
-
Back from holiday - lots of deliveries while I was away - so ready for IDEX.
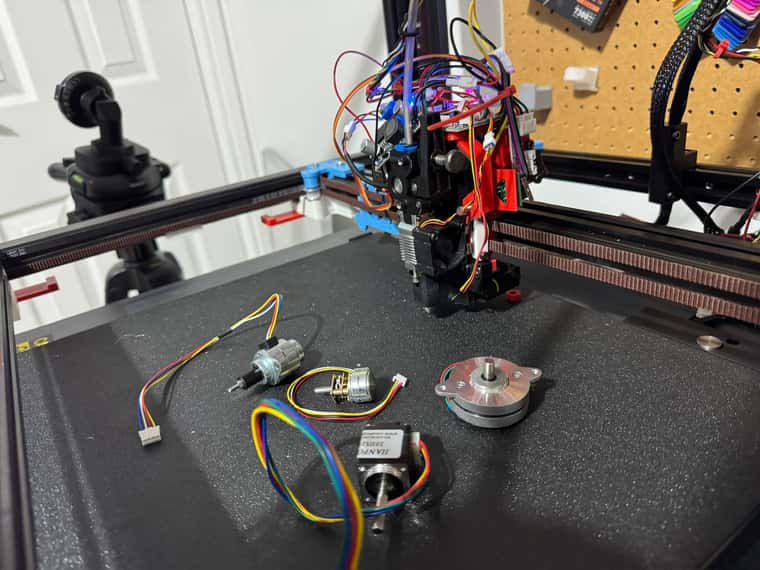
Made mistake with Order I think and bought 30 Buck Convertors instead of the 3 more I need - but only about £12 for all of them. All got a nice variety of end stops - both optical and mechanical.

Also now have various different stepper motors to try for z hopping in addition to servo. Think a stepper motor might be easier to control as will be able to set it as an AXIS which will move in line with head moves when doing bed mesh adjustments. I think the tiny geared stepper motor in the middle from ThePiHut with a cam is probably the best solution. But the larger linear stepper also a possibility.
First test of servo lifter - need to make some changes - probably to move belts to be on fixed part rather than moving part. Also should probably move servo back a bit plus add a bearing to the cam,.
But anyway it works - see short video.
https://youtube.com/shorts/AQexkpbFp64?si=ysh9GKfc63iHuNRg -
@dwuk said in Sovol SV08 Multiple Motion System Upgrade.:
add a bearing to the cam
That's what I meant before when I said use excenter bearings. Three of them in a planetary gear fashion could also replace the mgn-linear guide and have a wider footprint.
I'm not good with CAD or napkin drawings, otherwise I'd sketch up an example. Probably best suited for a pancake stepper. -
@o_lampe Thanks - I thought It was probably getting closer to what you were suggesting - but I am afraid I still don't really understand the planetary gear suggestion, especially how it would eliminate any side to side movement - but it sounds interesting if it can eliminate the need for the linear rail and if possible remove some depth from the solution.
I am thinking I am going to need some sort of gearing to have enough power to lift the print head.
-
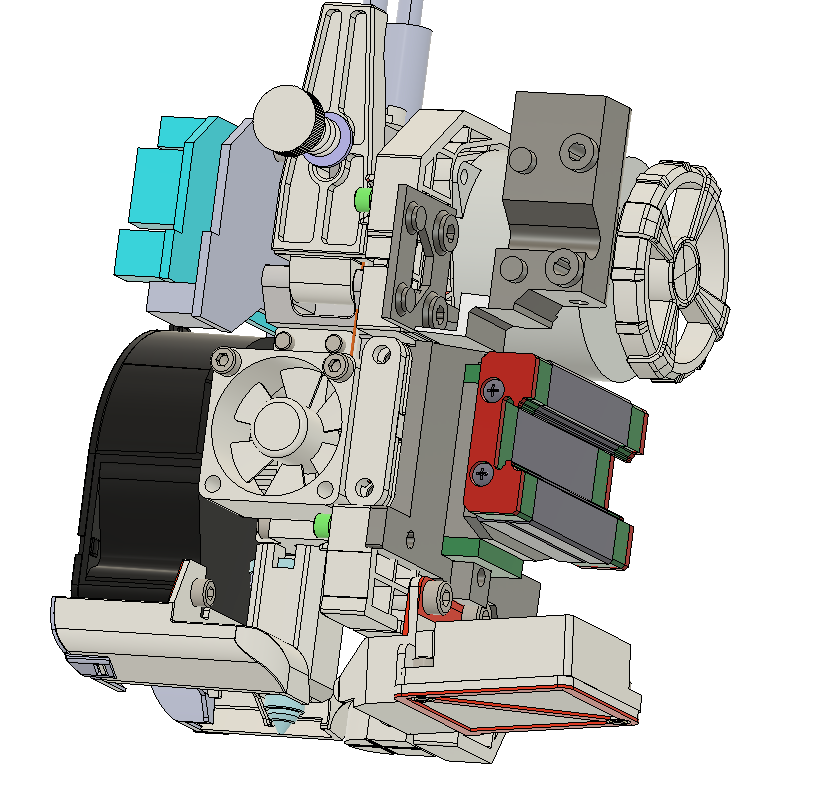
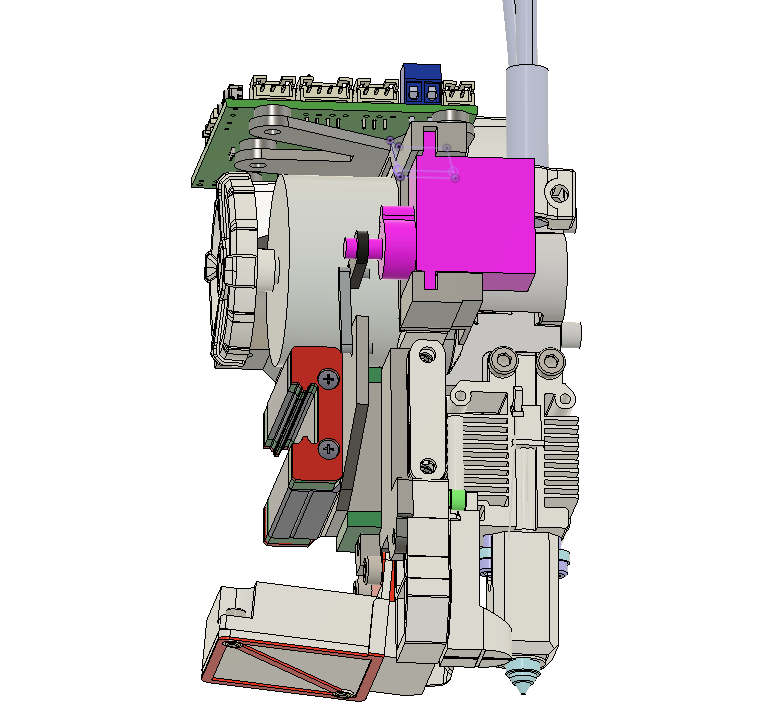
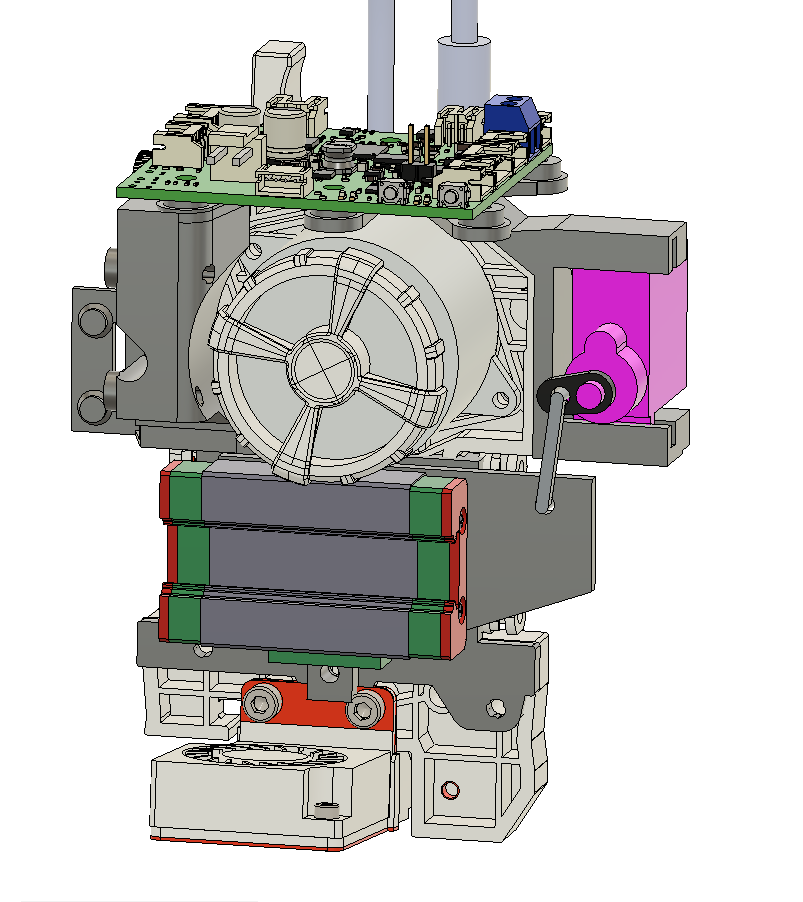
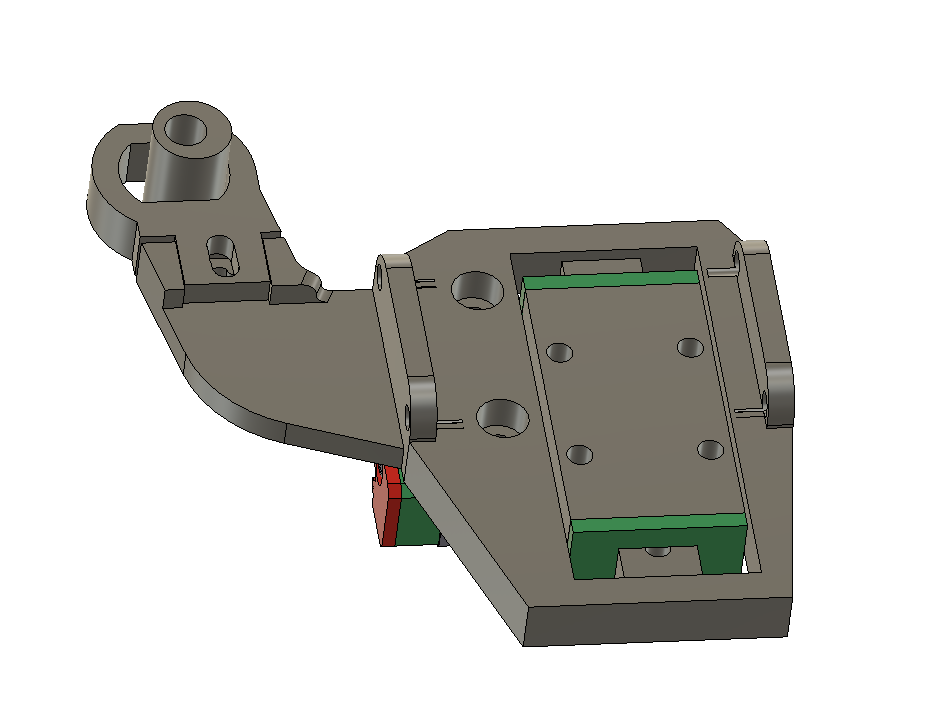
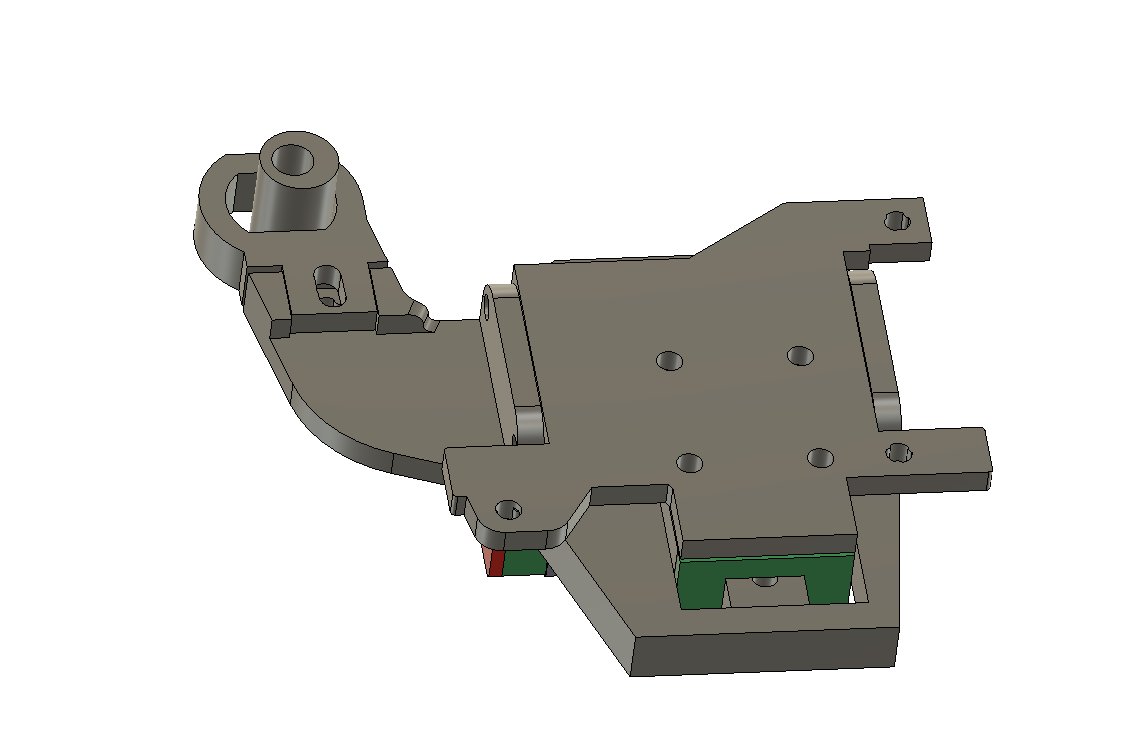
Not getting consistent Z heights with the new 'z-hopper' extruder, so remodelled it with a bigger linear rail (MGN9 vs MGN7), plus also made the rail bolt directly onto the back of the main X carriage - this will hopefully eliminate a lot of the wobbles.
Also corrected the issue with the belts being on the moving side, rather than the fixed side.
Also improved G32 / bed.g macro a bit - but would really like to get G30 S4 working properly - rather than having to the do calculations myself.
-
@dwuk One point of concern is the tiny screw that connects the excenter with the servo. It has to hold the whole weight of the tool?
There is also a big distance between tool-COG and the anchor point of the excenter, which adds the tendency to tilt the extruder rather than lift it. (risk of racking?)I just thought: worm gear! The smallest motor will be able to lift the tool and it comes with inbuild self locking.
-
@o_lampe Good point - may have to strengthen that part up - I just wanted to make it slightly adjustable/easy to print a small extra bit.
I can't get the servo any closer if I mount it on the side - but may be able to move it behind somewhere - especially if I attach it to the rail part rather than the extruder.
The new design will be easier to take apart and put back together to try out different options.
One of the motor options I bought - the linear stepper is worm/lead screw based so will try that out at some point.
-
Managed to get proper G32 4x Z motor levelling to work
G32
Leadscrew adjustments made: -0.435 -0.410 -0.334 -0.474, points used 4, (mean, deviation) before (-0.421, 0.027) after (0.000, 0.000)Not sure why the adjustments are so large - but the Z height seems to be quite consistent across the bed now on Gantry A.
I found the problem by looking at the code in GitHub and trying to work out the reasons for the 'Kinematics not supported' message coming out - in the end I found this line section - and thought numLeadscrews might not be set - and the condition of xSize not matching ySize was the problem - as I had specified a comma instead of a colon in my M670 for the lead screw positions.
M671 X410:-60:-60:410 Y420:-10:420,-10I see now that M98 P"config.g" would have found this problem - so need to run that more often.
if (seenX && seenY && xSize == ySize) { for (float& v : lastCorrections) { v = 0.0; } numLeadscrews = xSize; reprap.MoveUpdated(); return false; // successful configuration } -
@dwuk said in Sovol SV08 Multiple Motion System Upgrade.:
servo lifter
Just as a potentially useful datapoint. the very first iterations of e3d toolchanger used a metal gear hobby servo (not that one, I think more powerful one), as the tool lock motor. They quickly swapped to a small servo motor because of longevity. If this is doing Z hops then it will probably have several orders of magnitude more activations per print than a tool change in a toolchanger so I would look carefully as the service life of those servos.
-
@T3P3Tony Thanks - I am mainly just initially using the hobby servo to get the 2nd print head level with the first one - so I can do my first print, plus for some initial tests with z hopping and mesh levelling.
I've got a couple of small geared stepper motors that I think are going to work better in terms of the gcode at least - as I should be able to assign them to axis and get the movement to better synchronise with the X & Y movements. But the point about longevity might apply to those too.
I've also got some bigger ones - a Nema8 and Nema14 pancake to try too - but will need a lead screw with them probably as they are not geared.
Will have a look into what Servo Motors they used for the e3d tool changer too - so thanks.