My 6HC seems to think I have a CAN connected which I do not
-

-
Just a few minutes later and it is:

-
@darylprice the response from M122 B1 is as expected because there is no board on your bus.
The red led blinking is normal operation.
With those lines I asked you to remove out of your config.g, what does M122 report after a reset?
-

-
I am wondering if I have a bad board?
-
My X,Y , and Z axis' all work. The endstops do not. They are setup for NC.
Any help would be appreciated
-
When and where did you purchase the 6HC?
Is this a new build? Has it ever worked correctly?Can you send M122 and M98 P"config.g" in the gcode console of DWC and copy and paste the results here?
-
@Phaedrux
M122
=== Diagnostics ===
RepRapFirmware for Duet 3 MB6HC version 3.5.3 (2024-09-18 11:27:36) running on Duet 3 MB6HC v1.02 or 1.02a (SBC mode)
Board ID: 0JD2M-9P9DA-F0PSD-6J1F6-3S46Q-14SM2
Used output buffers: 1 of 40 (17 max)
=== RTOS ===
Static ram: 155352
Dynamic ram: 87412 of which 0 recycled
Never used RAM 103228, free system stack 214 words
Tasks: SBC(2,ready,0.3%,841) HEAT(3,nWait 6,0.0%,353) Move(4,nWait 6,0.0%,335) CanReceiv(6,nWait 1,0.0%,939) CanSender(5,nWait 7,0.0%,334) CanClock(7,delaying,0.0%,336) TMC(4,nWait 6,9.1%,67) MAIN(2,running,89.5%,444) IDLE(0,ready,1.1%,29), total 100.0%
Owned mutexes: HTTP(MAIN)
=== Platform ===
Last reset 00:00:54 ago, cause: power up
Last software reset at 2025-01-29 19:40, reason: User, Gcodes spinning, available RAM 103228, slot 0
Software reset code 0x6003 HFSR 0x00000000 CFSR 0x00000000 ICSR 0x00400000 BFAR 0x00000000 SP 0x00000000 Task SBC Freestk 0 n/a
Error status: 0x00
MCU temperature: min 21.3, current 31.0, max 31.0
Supply voltage: min 24.2, current 24.2, max 24.3, under voltage events: 0, over voltage events: 0, power good: yes
12V rail voltage: min 12.1, current 12.3, max 12.5, under voltage events: 0
Heap OK, handles allocated/used 0/0, heap memory allocated/used/recyclable 0/0/0, gc cycles 0
Events: 0 queued, 0 completed
Driver 0: standstill, SG min n/a, mspos 8, reads 39186, writes 14 timeouts 0
Driver 1: standstill, SG min n/a, mspos 8, reads 39186, writes 14 timeouts 0
Driver 2: standstill, SG min n/a, mspos 8, reads 39187, writes 14 timeouts 0
Driver 3: standstill, SG min n/a, mspos 8, reads 39187, writes 14 timeouts 0
Driver 4: standstill, SG min n/a, mspos 8, reads 39190, writes 11 timeouts 0
Driver 5: standstill, SG min n/a, mspos 8, reads 39190, writes 11 timeouts 0
Date/time: 2025-01-29 22:23:42
Slowest loop: 1.62ms; fastest: 0.08ms
=== Storage ===
Free file entries: 20
SD card 0 not detected, interface speed: 37.5MBytes/sec
SD card longest read time 0.0ms, write time 0.0ms, max retries 0
=== Move ===
DMs created 125, segments created 0, maxWait 0ms, bed compensation in use: none, height map offset 0.000, max steps late 0, min interval 0, bad calcs 0, ebfmin 0.00, ebfmax 0.00
no step interrupt scheduled
Moves shaped first try 0, on retry 0, too short 0, wrong shape 0, maybepossible 0
=== DDARing 0 ===
Scheduled moves 0, completed 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1
=== DDARing 1 ===
Scheduled moves 0, completed 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1
=== Heat ===
Bed heaters -1 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1, chamber heaters -1 -1 -1 -1, ordering errs 0
=== GCodes ===
Movement locks held by null, null
HTTP* is doing "M122" in state(s) 0
Telnet is idle in state(s) 0
File is idle in state(s) 0
USB is idle in state(s) 0
Aux is idle in state(s) 0
Trigger* is idle in state(s) 0
Queue is idle in state(s) 0
LCD is idle in state(s) 0
SBC is idle in state(s) 0
Daemon is idle in state(s) 0
Aux2 is idle in state(s) 0
Autopause is idle in state(s) 0
File2 is idle in state(s) 0
Queue2 is idle in state(s) 0
Q0 segments left 0, axes/extruders owned 0x0000000
Code queue 0 is empty
Q1 segments left 0, axes/extruders owned 0x0000000
Code queue 1 is empty
=== CAN ===
Messages queued 275, received 0, lost 0, errs 261140, boc 0
Longest wait 0ms for reply type 0, peak Tx sync delay 0, free buffers 50 (min 50), ts 275/0/0
Tx timeouts 0,0,274,0,0,0 last cancelled message type 30 dest 127
=== SBC interface ===
Transfer state: 5, failed transfers: 0, checksum errors: 0
RX/TX seq numbers: 1297/1297
SPI underruns 0, overruns 0
State: 5, disconnects: 0, timeouts: 0 total, 0 by SBC, IAP RAM available 0x24d04
Buffer RX/TX: 0/0-0, open files: 0
=== Duet Control Server ===
Duet Control Server version 3.5.3 (2024-09-19 12:16:06, 64-bit)
HTTP+Executed:Executing M122
Code buffer space: 4096
Configured SPI speed: 8000000Hz, TfrRdy pin glitches: 0
Full transfers per second: 0.13, max time between full transfers: 66.8ms, max pin wait times: 43.4ms/3.7ms
Codes per second: 0.00
Maximum length of RX/TX data transfers: 4359/688The M98 command ran and the block truned green. I assumed it worked correctly
-
This is a new build, so it has never functioned. I purchased in December from :
https://www.filastruder.com/collections/electronics
I sent the files you requested. I am currently away from the machine and will not be back at the shop until tomorrow morning. USA,Oregon PST time -
@darylprice ignore the CAN errors, they just mean that the time sync messages being broadcast at regular intervals are not being acknowledged because there are no devices connected to the CAN bus.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42 thanks, I created a new config.g with the config tool. I will be able to test tomorrow about 11:00am.
-
@dc42 @Phaedrux
The following is my new config.g.
After installing this, the only function I have is x,y,and z movements. No endstops, BLtouch does not work. I do not have any sensors or heaters attached yet. I am trying to get my endstops to work.
I am beginning to think I have a bad board. If I let the machine run for 30 minutes, just setting the CAN errors raise to over 30 million.
I will be away for two hours.; Configuration file for RepRapFirmware on Duet 3 Main Board 6HC
; executed by the firmware on start-up
;
; generated by RepRapFirmware Configuration Tool v3.5.10 on Wed Jan 29 2025 09:43:57 GMT-0800 (Pacific Standard Time); General
G90 ; absolute coordinates
M83 ; relative extruder moves
M550 P"Duet 3" ; set hostname; Smart Drivers
M569 P0.0 S1 D2 ; driver 0.0 goes forwards (X axis)
M569 P0.1 S1 D2 ; driver 0.1 goes forwards (Y axis)
M569 P0.2 S1 D2 ; driver 0.2 goes forwards (Z axis)
M569 P0.3 S1 D2 ; driver 0.4 goes forwards (z axis)
M569 P0.4 S1 D2 ; driver 0.3 goes forwards (extruder 0); Motor Idle Current Reduction
M906 I30 ; set motor current idle factor
M84 S30 ; set motor current idle timeout; Axes
M584 X0.0 Y0.1 Z0.2 'z0.4 ; set axis mapping
M350 X16 Y16 Z16 'z16 I1 ; configure microstepping with interpolation
M906 X1400 Y3200 Z1400 'z1400 ; set axis driver currents
M92 X662 Y662 Z662 'z662 ; configure steps per mm
M208 X0:550 Y0:550 Z0:400 'z0:400 ; set minimum and maximum axis limits
M566 X900 Y900 Z12 'z900 ; set maximum instantaneous speed changes (mm/min)
M203 X1080000 Y1080000 Z60000 'z60000 ; set maximum speeds (mm/min)
M201 X500 Y500 Z20 'z20 ; set accelerations (mm/s^2); Extruders
M584 E0.3 ; set extruder mapping
M350 E16 I1 ; configure microstepping with interpolation
M906 E1400 ; set extruder driver currents
M92 E420 ; configure steps per mm
M566 E120 ; set maximum instantaneous speed changes (mm/min)
M203 E3600 ; set maximum speeds (mm/min)
M201 E250 ; set accelerations (mm/s^2); Kinematics
M669 K0 ; configure Cartesian kinematics; Probes
M558 K0 P9 C"io3.in" H5 F120 T6000 ; configure BLTouch probe via slot #0
G31 P500 X0 Y0 Z0.7 ; set Z probe trigger value, offset and trigger height
M950 S0 C"!io3.out" ; create servo #0 for BLtouch; Endstops
M574 X2 P"io8.in" S1 ; configure X axis endstop
M574 Y2 P"io6.in" S1 ; configure Y axis endstop
M574 Z1 S2 ; configure Z axis endstop
M574 'z1 S2 ; configure z axis endstop; Sensors
M308 S0 P"temp0" Y"thermistor" A"Heated Bed" T100000 B4725 C7.06e-8 ; configure sensor #0
M308 S1 P"temp1" Y"thermistor" A"Nozzle" T100000 B4725 C7.06e-8 ; configure sensor #1; Heaters
M950 H0 C"out0" T0 ; create heater #0
M143 H0 P0 T0 C0 S140 A0 ; configure heater monitor #0 for heater #0
M307 H0 R2.43 D5.5 E1.35 K0.56 B1 ; configure model of heater #0
M950 H1 C"out1" T1 ; create heater #1
M143 H1 P0 T1 C0 S285 A0 ; configure heater monitor #0 for heater #1
M307 H1 R2.43 D5.5 E1.35 K0.56 B0 ; configure model of heater #1
M950 H2 C"out2" T1 ; create heater #2
M143 H2 P0 T1 C0 S285 A0 ; configure heater monitor #0 for heater #2
M307 H2 R2.43 D5.5 E1.35 K0.56 B0 ; configure model of heater #2; Heated beds
M140 P0 H0 ; configure heated bed #0; Fans
M950 F0 C"out3" ; create fan #0
M106 P0 S0 L0 X1 B0.1 ; configure fan #0
M950 F1 C"out4" ; create fan #1
M106 P1 S0 B0.1 H1 T45 ; configure fan #1; Tools
M563 P0 D0 H1 F0 ; create tool #0
M568 P0 R0 S0 ; set initial tool #0 active and standby temperatures to 0C -
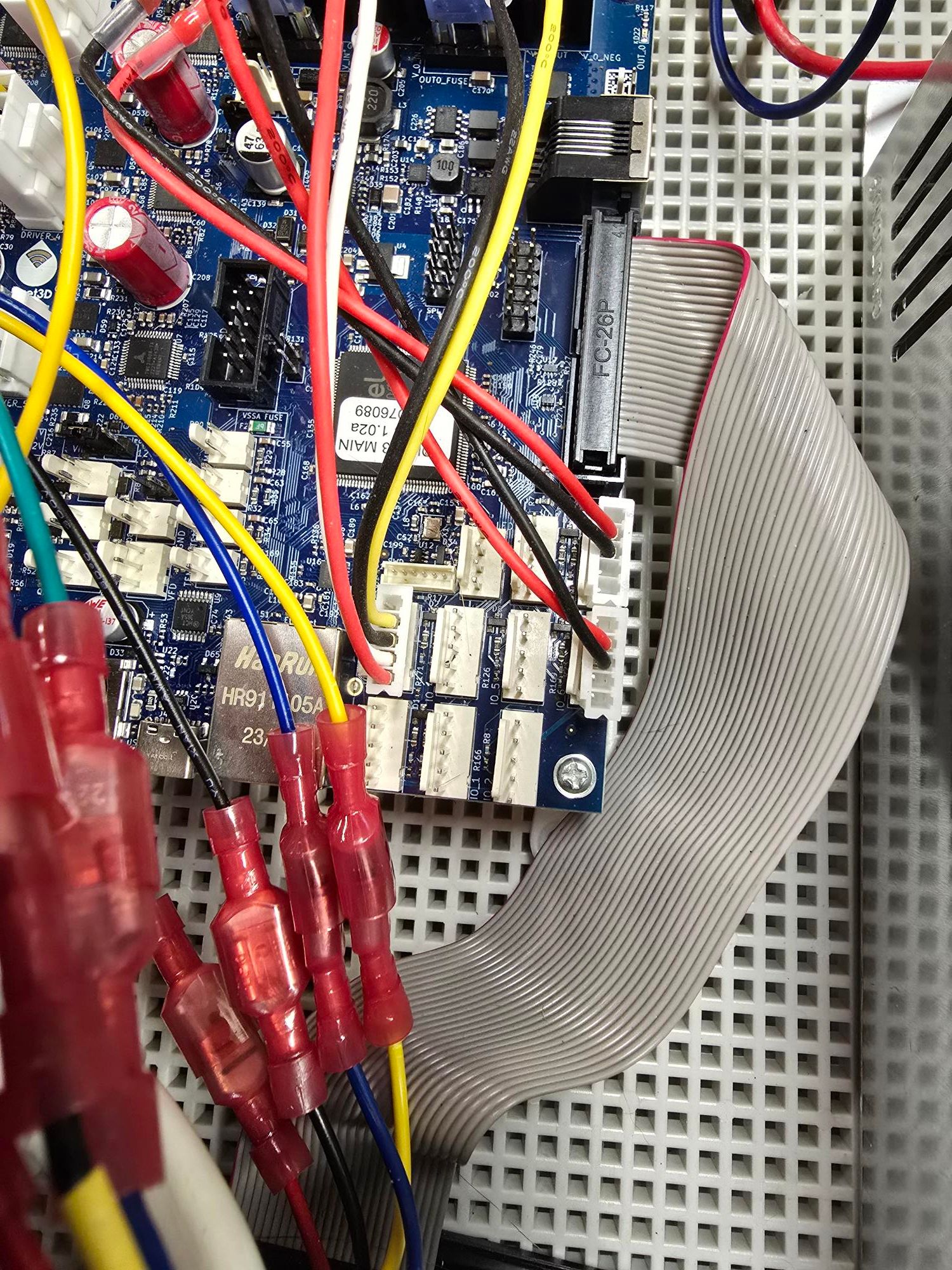
@darylprice can you post a photo of your wiring for each endstop please?
-
This shows the two wires forthe micro switches for X and Y
The other side is the BLTouch. -
@darylprice said in My 6HC seems to think I have a CAN connected which I do not:
If I let the machine run for 30 minutes, just setting the CAN errors raise to over 30 million.
You're still getting CAN errors with the new config.g?
Can you share your homing files? homex.g homey.g homez.g homeall.g
How are you testing the endstops?
-
As dc42 already mentioned the can errors are not significant because you do not have any can devices.
-
-
@T3P3Tony
I have been just moving the x axis and pushing the switch manually so if it failed it would not cause any damage -
@darylprice from your image it looks like the following:
IO3: connections in 5V, out,gnd, in
IO6: io6.in and GND
IO8: io8.in and GNDFrom config.g
M574 X2 P"io8.in" S1 ; configure X axis endstop
M574 Y2 P"io6.in" S1 ; configure Y axis endstopWhich on first inspection looks correct.
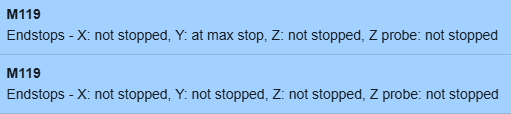
You can check if the endstops trigger sending M119 when they are triggered and untriggered. E.g, here is an example with the Y endstop:
-
@T3P3Tony
I get the samething. When I press Y endstop I get Y: at max stop, same with X.
I will return 1100am PST US