New XZmotors problem
-
; Configuration file for Duet WiFi (firmware version 3)
; executed by the firmware on start-up
;
; generated by RepRapFirmware Configuration Tool v3.3.10 on Mon Dec 06 2021 21:58:20 GMT+0100 (Central European Standard Time); General preferences
M575 P1 S1 B57600 ; enable support for PanelDue
G90 ; send absolute coordinates...
M83 ; ...but relative extruder moves
M550 P"TazmanSW" ; set printer name
M669 K2 X1:0:1 Y0:1:0 Z1:0:-1 ; select CoreXZ mode; Network
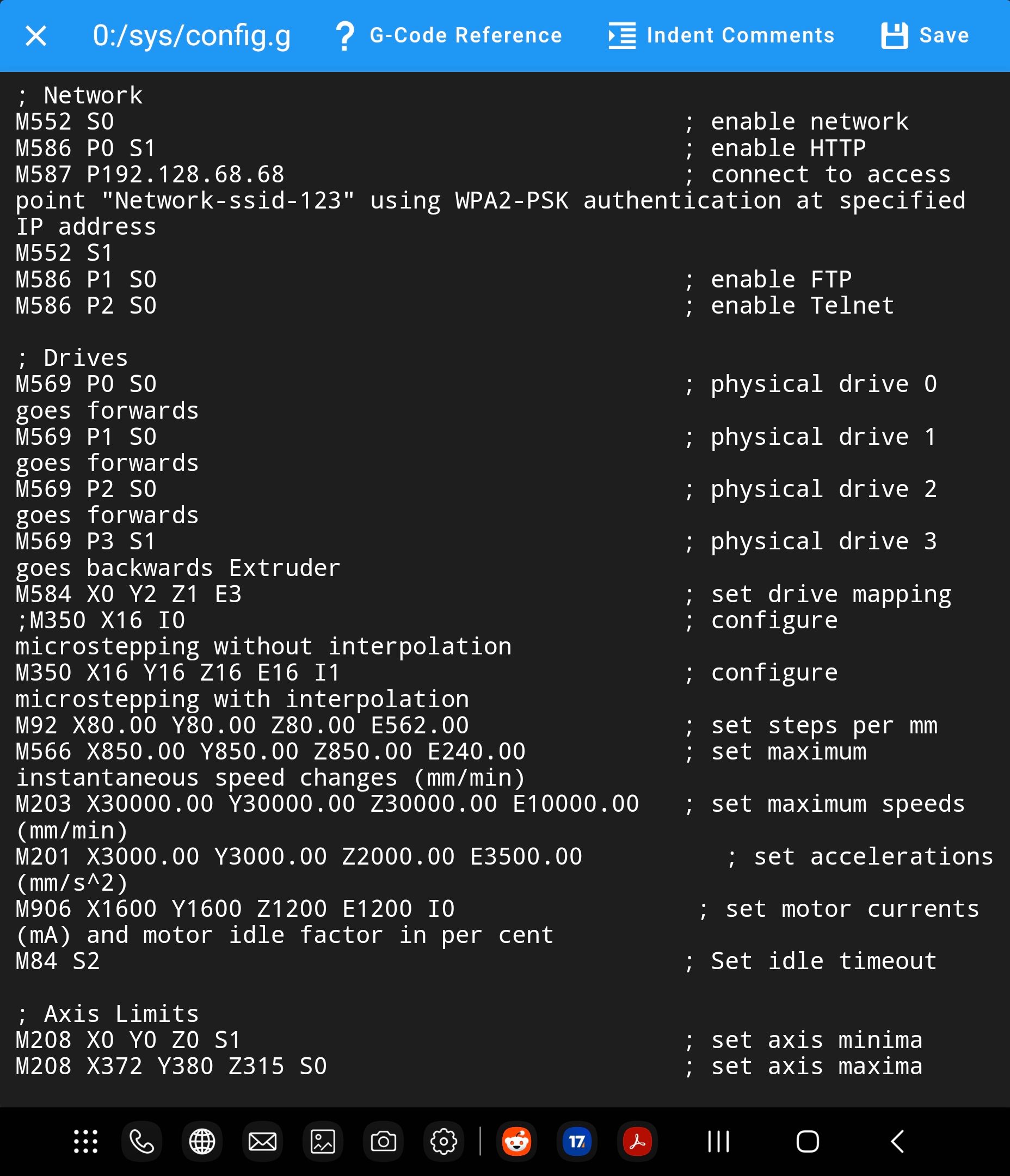
M552 S0 ; enable network
M586 P0 S1 ; enable HTTP
M587 P192.128.68.68 ; connect to access point "Network-ssid-123" using WPA2-PSK authentication at specified IP address
M552 S1
M586 P1 S0 ; enable FTP
M586 P2 S0 ; enable Telnet; Drives
M569 P0 S0 ; physical drive 0 goes forwards
M569 P1 S0 ; physical drive 1 goes forwards
M569 P2 S0 ; physical drive 2 goes forwards
M569 P3 S1 ; physical drive 3 goes backwards Extruder
M584 X0 Y2 Z1 E3 ; set drive mapping
;M350 X16 I0 ; configure microstepping without interpolation
M350 X16 Y16 Z16 E16 I1 ; configure microstepping with interpolation
M92 X80.00 Y80.00 Z80.00 E562.00 ; set steps per mm
M566 X150.00 Y150.00 Z150.00 E240.00 ; set maximum instantaneous speed changes (mm/min)
M203 X30000.00 Y30000.00 Z30000.00 E10000.00 ; set maximum speeds (mm/min)
M201 X900.00 Y900.00 Z900.00 E3500.00 ; set accelerations (mm/s^2)
M906 X1200 Y1200 Z1200 E1200 I0 ; set motor currents (mA) and motor idle factor in per cent
M84 S2 ; Set idle timeout; Axis Limits
M208 X0 Y0 Z0 S1 ; set axis minima
M208 X372 Y380 Z315 S0 ; set axis maxima; Endstops
M574 X1 S1 P"!xstop" ; configure switch-type (e.g. microswitch) endstop for low end on X via pin !xstop
M574 Y1 S1 P"!ystop" ; configure switch-type (e.g. microswitch) endstop for low end on Y via pin !ystop
;M574 Z1 S1 P"!zstop" ; configure switch-type (e.g. microswitch) endstop for low end on Z via pin !zstop
M574 Z1 S2 ; configure Z-probe endstop for low end on Z; Z-Probe
M950 S0 C"exp.heater3" ; create servo pin 0 for BLTouch
M558 P9 C"^zprobe.in" H10 F1200:420 T6000 ; set Z probe type to bltouch and the dive height + speeds
;G31 P25 X-30 Y-15 Z2.90 ; set Z probe trigger value, offset and trigger height
M557 X50:370 Y50:380 S50 ; define mesh grid
M280 P0 S160 I1 ; Probe reset; Heaters
M308 S0 P"bedtemp" Y"thermistor" T100000 B4138 ; configure sensor 0 as thermistor on pin bedtemp
M950 H0 C"bedheat" T0 ; create bed heater output on bedheat and map it to sensor 0
M307 H0 B1 S1.00 ; enable bang-bang mode for the bed heater and set PWM limit
M140 H0 ; map heated bed to heater 0
M143 H0 S120 ; set temperature limit for heater 0 to 100C
M308 S1 P"e0temp" Y"thermistor" T100000 B4138 ; configure sensor 1 as thermistor on pin e0temp
M950 H1 C"e0heat" T1 ; create nozzle heater output on e0heat and map it to s ensor 1
M307 H1 B0 S0.75 ; disable bang-bang mode for heater and set PWM limit
M143 H1 S280 ; set temperature limit for heater 1 to 250C; Fans
M950 F0 C"fan0" Q255 ; create fan 0 on pin fan0 and set its frequency
M106 P0 S0 H-1 ; set fan 0 value. Thermostatic control is turned off
M950 F1 C"fan1" Q150 ; create fan 1 on pin fan1 and set its frequency
M106 P1 S1 H1 T55 ; set fan 1 value. Thermostatic control is turned on; Tools
M563 P0 D0 H1 F0 S"Mosquito" ; define tool 0
;G10 P0 X0 Y0 Z0 ; set tool 0 axis offsets
G10 P0 R0 S0 ; set initial tool 0 active and standby temperatures to 0C
M563 P1 D0 H1 F0
G10 P1 R0 S0
M563 P2 D0 H1 F0
G10 P2 R0 S0
M563 P3 D0 H1 F0
G10 P3 R0 S0; Custom settings
;M572 D0 S0.3
M564 H0
M501
M302 P1
M950 P1 C"exp.heater4" ; allocate GPIO port1 to heater4 on expansion connector, 500Hz;M955 P0 C"spi.cs4+spi.cs3" ; all wires connected to temp DB connector, no temperature daughterboard
M593 P"zvdd" F56 ; use ZVD input shaping to cancel ringing at 40.5HzM98 P"load_variables.g" ; Runs the macro in the file load_variables.g
-
@aceranic I had to change direction as I was getting Phase warnings....
Also I have 2 motors on Y axis, connected to 2 Z axis drivers. -
@aceranic it could be a result of the fairly low jerk (M556) settings you have.
Your acceleration settings are also very low (M201) -
@jay_s_uk Ok, I didnt have such issue before with same settings. They are set higher is slicer.
-
Increased current and accwl, jerk, still the same.
-
Incresed all values but still no luck
-
@aceranic i guess its mechanical issue
-
@jay_s_uk Not sure still. After board restart it was moving fine few times full X travel. Then I started the print and same issue again.
I tried one older print large size, same. -
Are you using mesh compensation? Can you try disabling it if you are?
-
@Phaedrux Hi. Will try. Only thing I didnt try yet.
-
Yep. It seems that 25mm grid was too much to chew. Thanks!!!!
By the way Phaedrux, I ordered BTT extension for 3 drivers for my MMU. Will need help with that

-
@aceranic said in New XZmotors problem:
I ordered BTT extension for 3 drivers for my MMU.
If it's this board https://github.com/bigtreetech/BTT-Expansion-module/blob/master/BTT EXP-MOT/BTT EXP-MOT V1.0User Guide.pdf then I think you can only use two of the drivers with Duet 2 WiFi, as it has to be connected in STEP/DIR mode, not UART or SPI mode. Is that correct @jay_s_uk ?
Ian
Bed-slinger - Mini5+ WiFi/1LC | RRP Fisher v1 - D2 WiFi | Polargraph - D2 WiFi | TronXY X5S - 6HC/Roto | CNC router - 6HC | Tractus3D T1250 - D2 Eth
-
@droftarts yep, thats correct. Step/Dir only with no UART or SPI control
-
@droftarts yep, that is the one.
The plan is to use 2 drivers for MMU.
This should be no problem I believe.
Is there a guide enywhere for the configuration of this board? -
@aceranic said in New XZmotors problem:
Is there a guide enywhere for the configuration of this board?
Just the linked BTT PDF, and https://docs.duet3d.com/en/User_manual/Connecting_hardware/Motors_connecting_external
Ian