Duet Maesto Stepper Driver Expansion Schematic
-
I am looking for a schematic of the Duet Maestro stepper driver expansion.
For the Maestro itself, you can find it on github. What about the expansion? Is this available as well?
Thanks!
-
It was designed by M3D, I will ask them for it. It is basically the same as the TMC2208 elements of the shcematic on the Maestro itself tho.
-
Thats what I am guessing, but I would like to verify it. I have still this strange issue that the expansion does not perform as well as the onboard steppers. The print results are identical, but the noise is worse.
Schematic would help a ton. Thanks!
-
@Wurstkarton said in Duet Maesto Stepper Driver Expansion Schematic:
The print results are identical, but the noise is worse.
Are you using any M569 settings to change the driver mode; and if so, are you using the same settings on the expansion drivers as on the main board drivers?
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42
Yes, I am using this command.M569 P0 S0 D3 V1000 M569 P1 S0 D3 V1000 M569 P2 S1 D3 V1000 M569 P3 S0 D3 V1000 M569 P4 S1 D3 V1000 M569 P5 S0 D3 V1000 M569 P6 S1 D3 V1000Same Motors. Same extruders. Same settings. I created a thread about it a while back (see this thread), but had other issues to fight with up to now.
The conclusion at the time was:
- tried 2 Maestros with same result
- tried 2 Expansion boards with same result
- tried different cables (same type though) with same result
- tried different motors (same type though) with same result
So it might be that the expansion cannot handle this type of motor well? Or the cable length is a problem (50cm)?
Anyways, I would like to try and take a look at it myself. To do so, I want to see the schematic.
-
Thanks. The difference might possibly be caused by differences in layout between the daughter board and the main board. I don't know whether M3D copied our main board layout for the daughter board, or did their own layout.
I can't imagine that 50cm cable length would be a problem.
-
-
@T3P3Tony Thank you! That was quick.
I'll take a look later.
-
From the schematic, I do not really see any noteworthy difference. As @dc42 mentioned, it rather might be the implementation in the layout.
Anyways, I'll use a current probe with an osci this week to assess the differences. I'll come back with what I find.
-
I performed the analysis and checked the current fed by the drivers into the motors using a scope + current probe attached to a single wire of the motor.
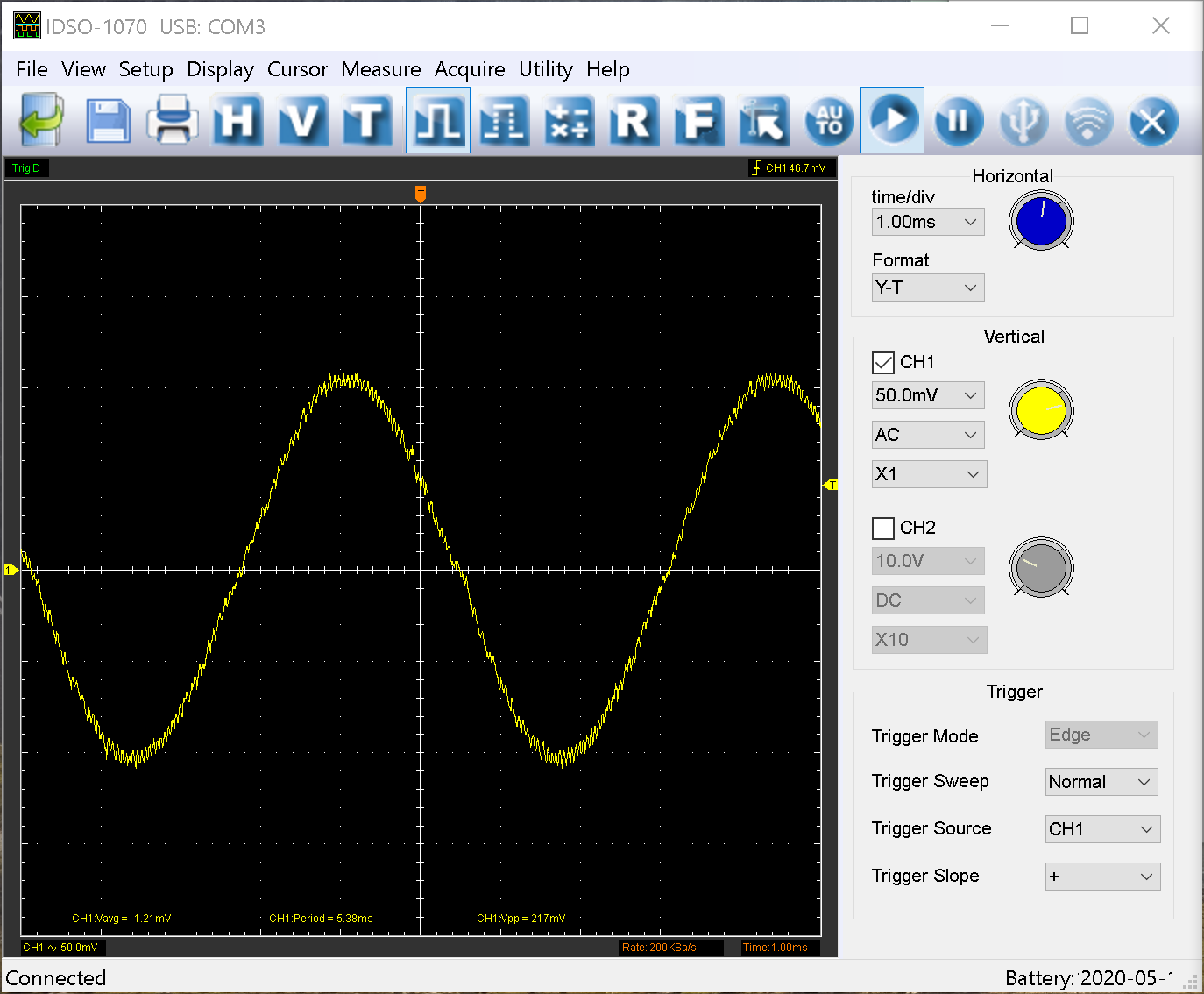
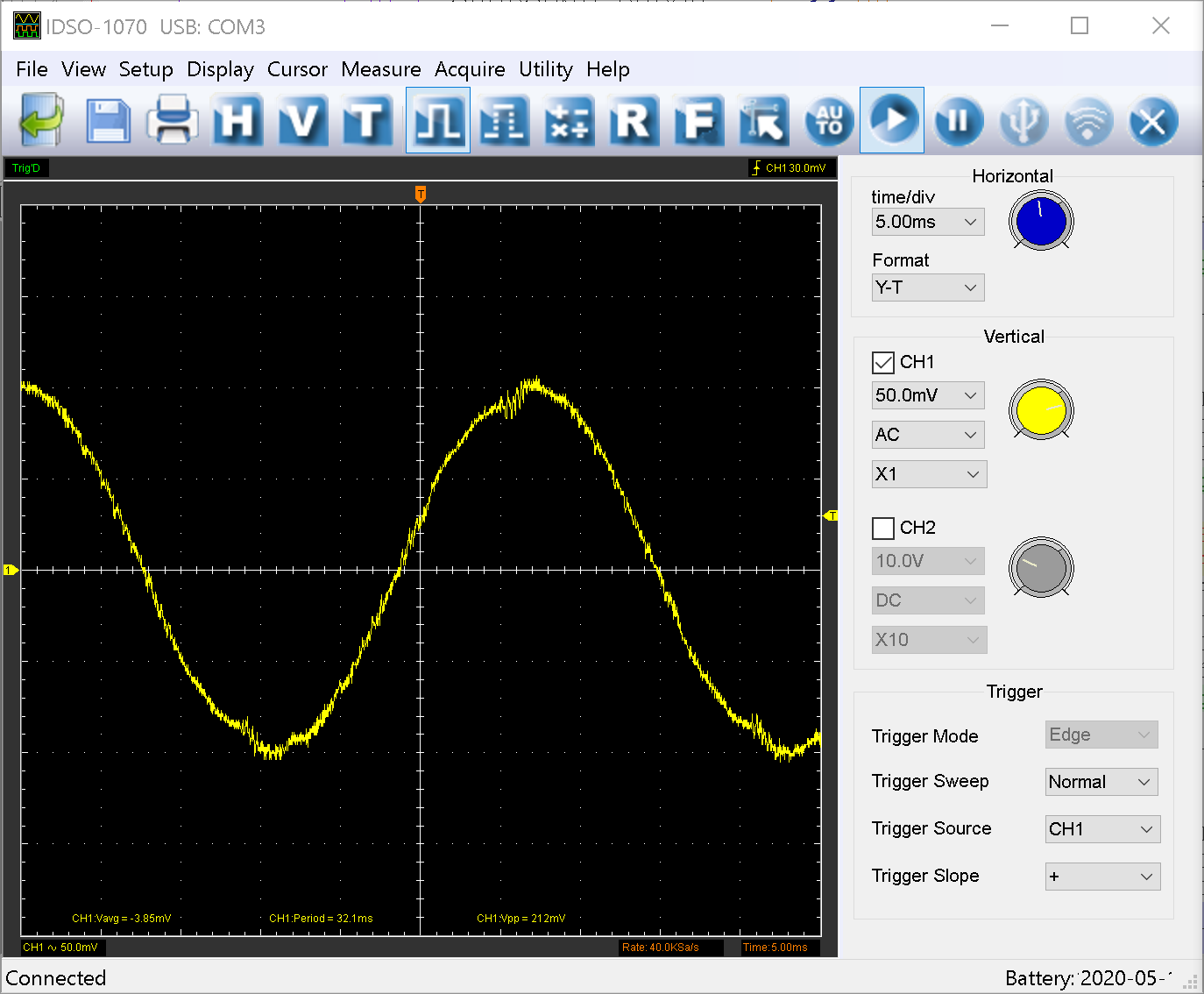
This is how a onboard driver performs (P4, TBL = 1, different feedrates):
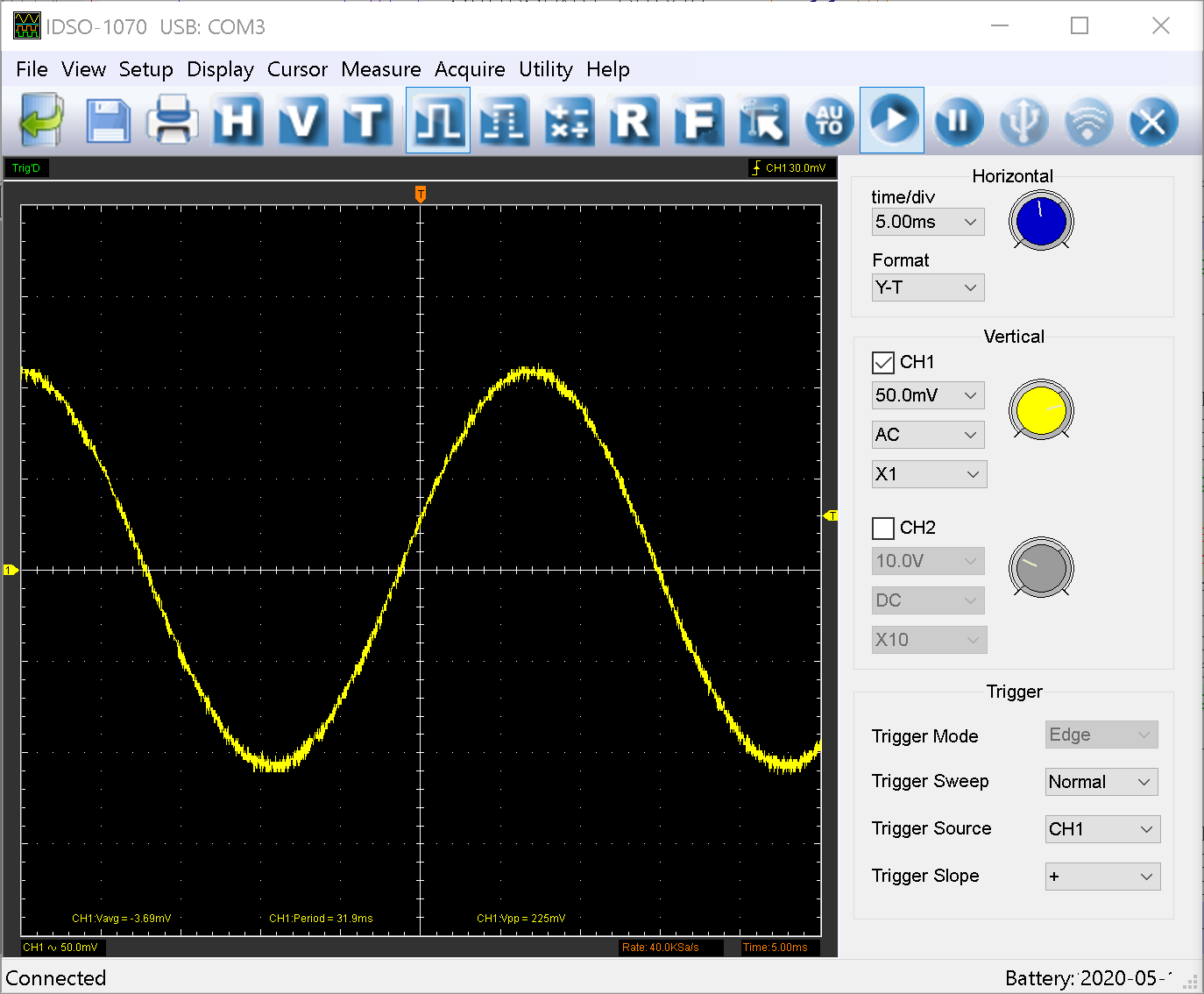
As can be observed, the waveforms are very smooth. At 60mm/s, you can see that the sine wave gets jagged (which is fine for higher speeds).
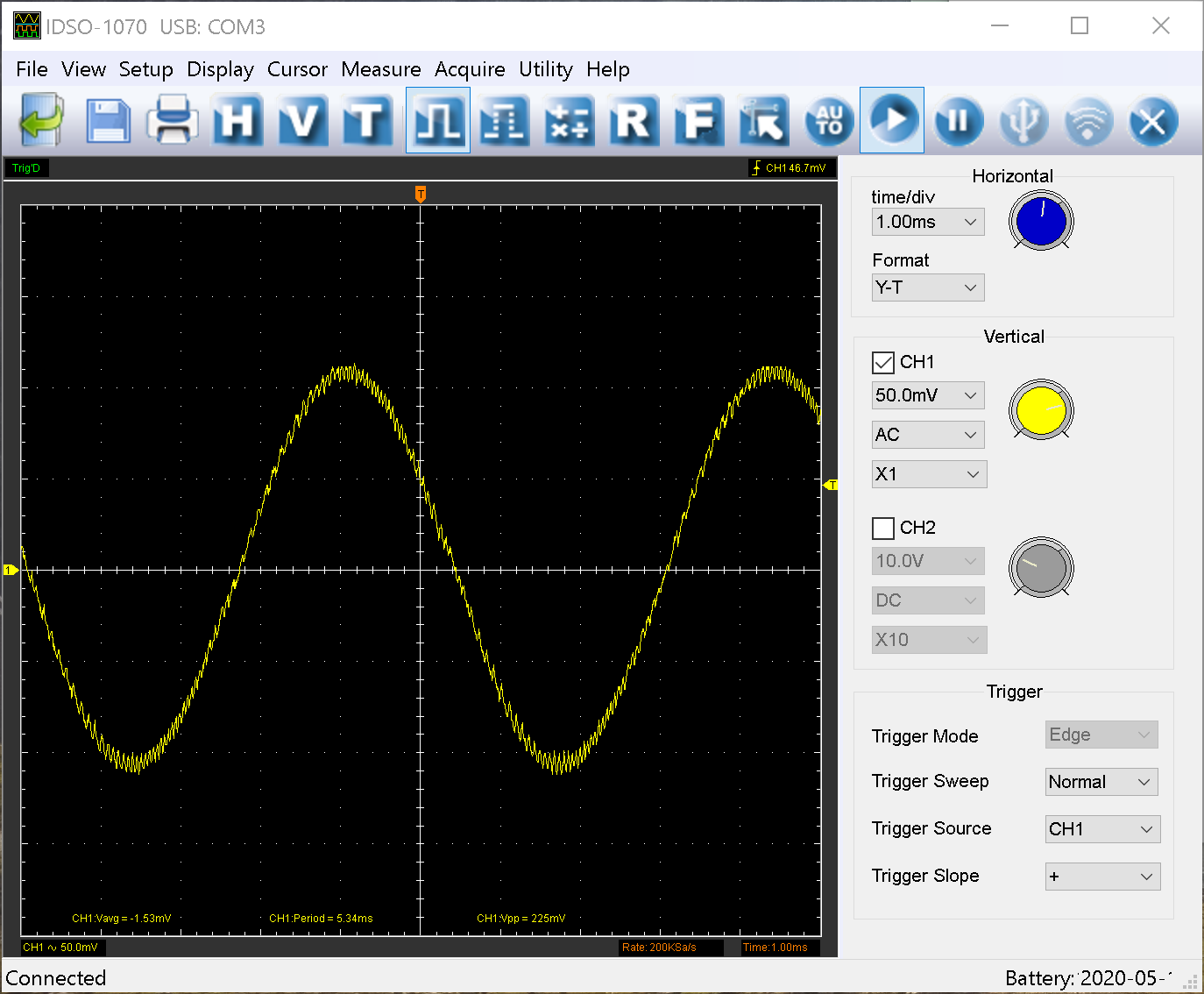
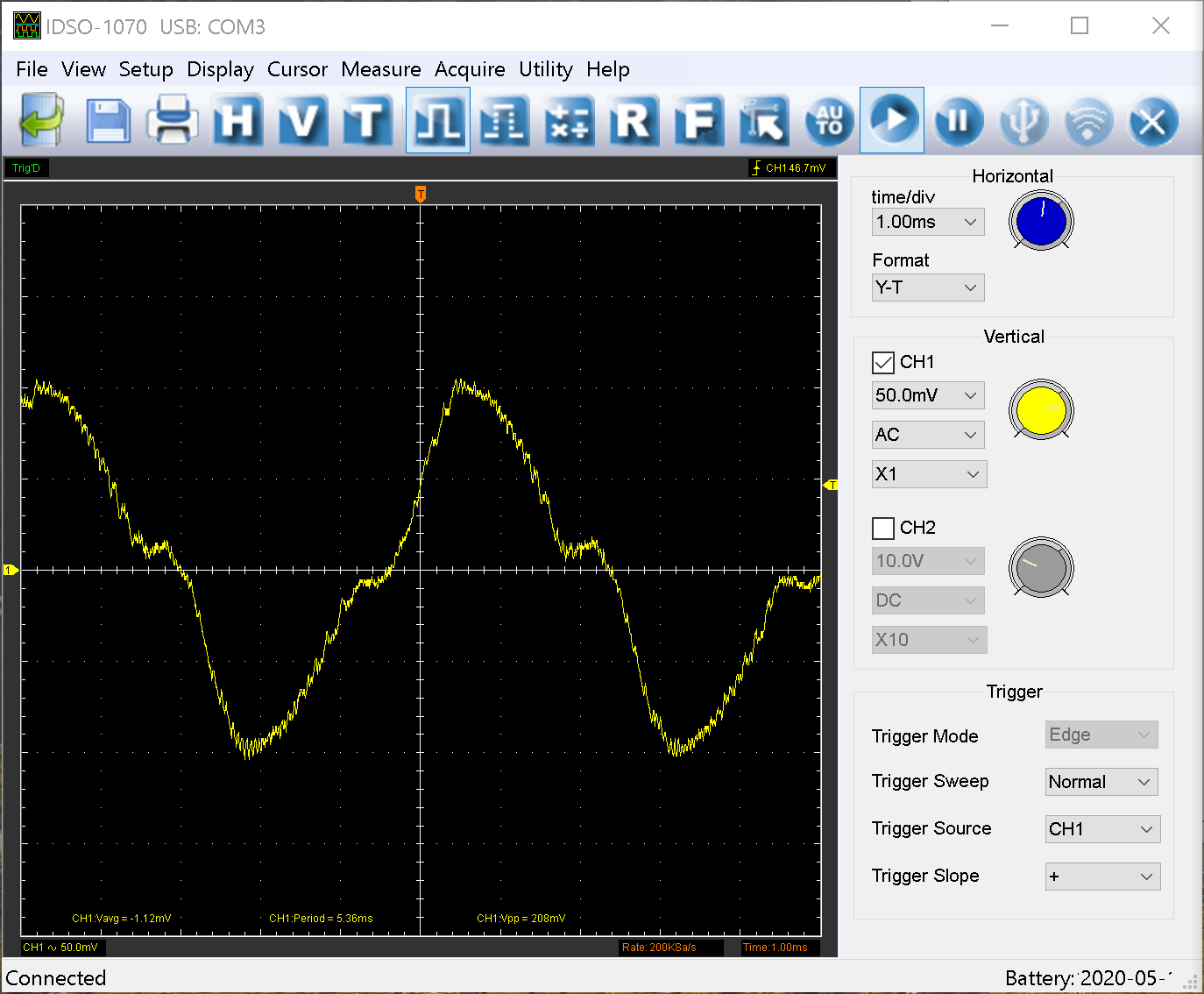
This is how P6 performs (TBL = 1):
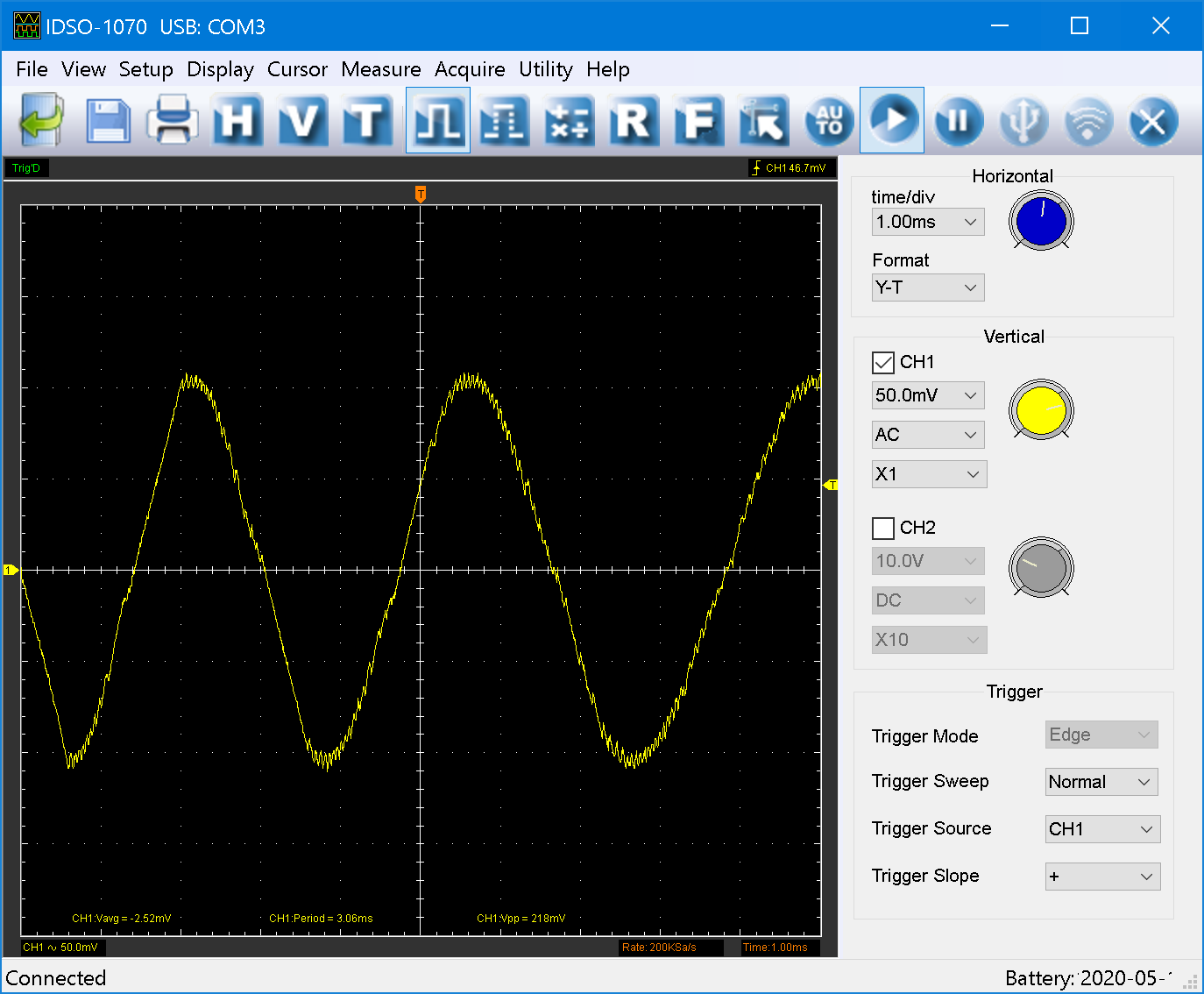
This also looks pretty good. Although it is a touch less smooth as before.
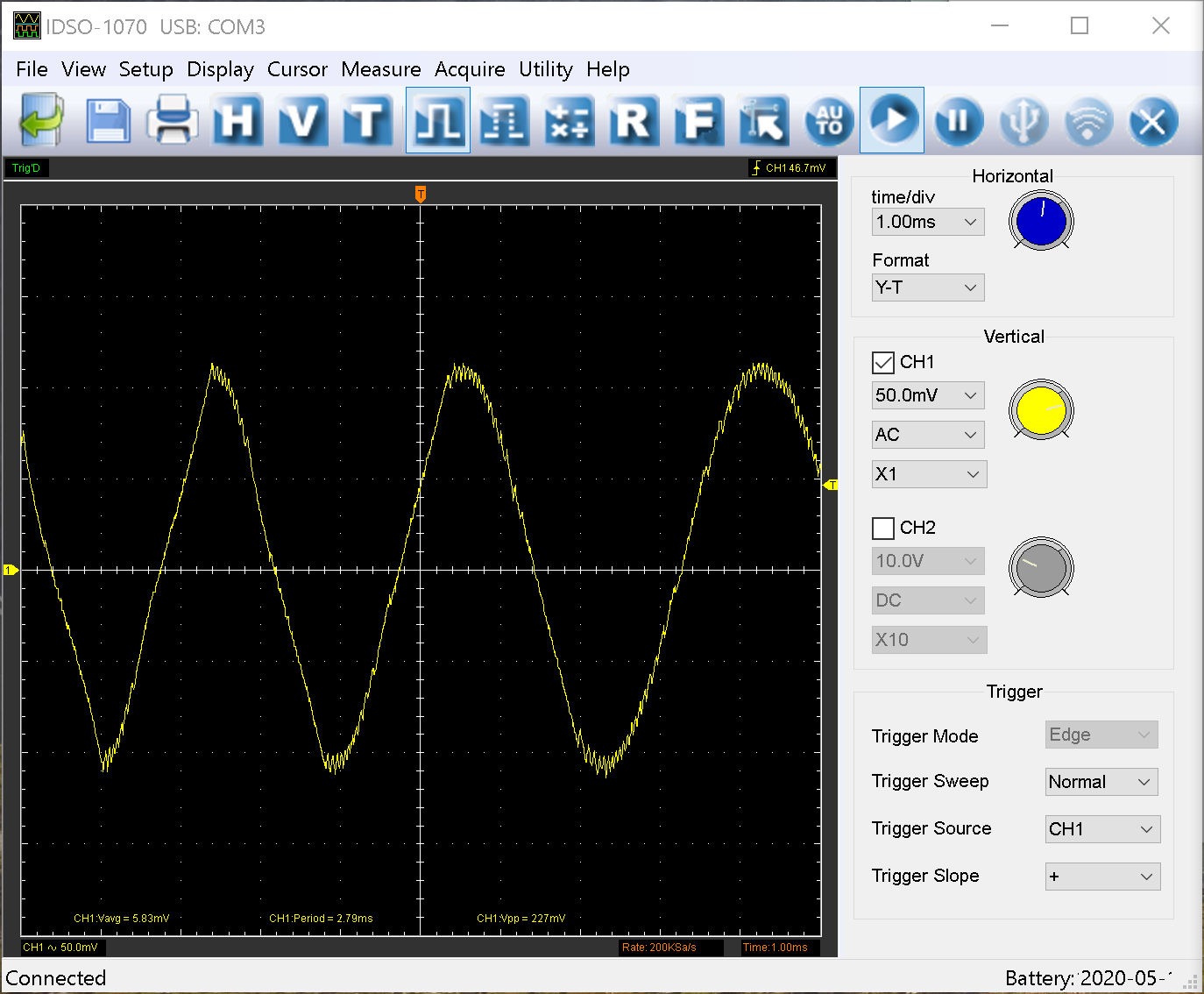
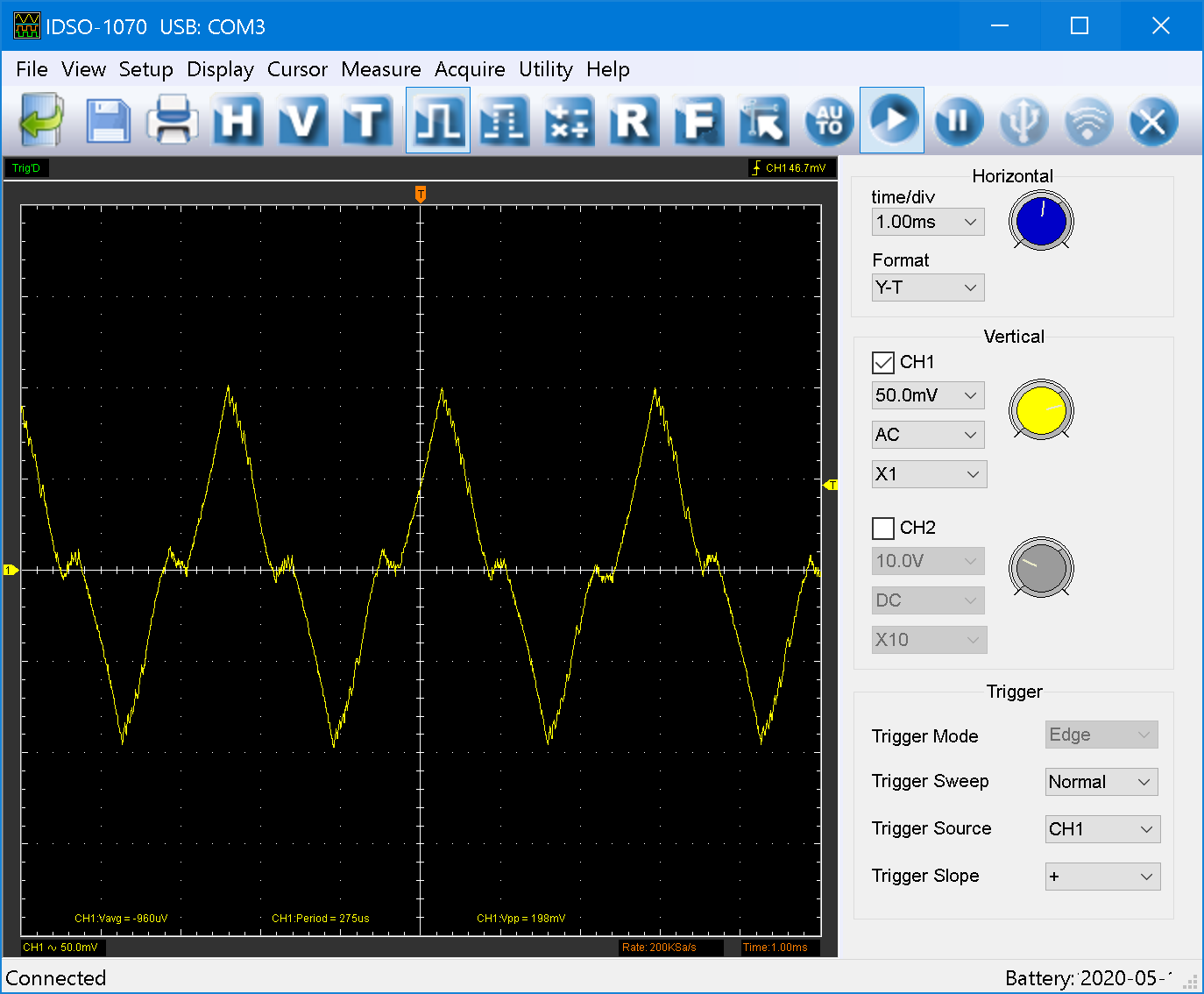
Now to the black sheep in the flock, P5 (5mm/s for TBL 0,1 and 2):
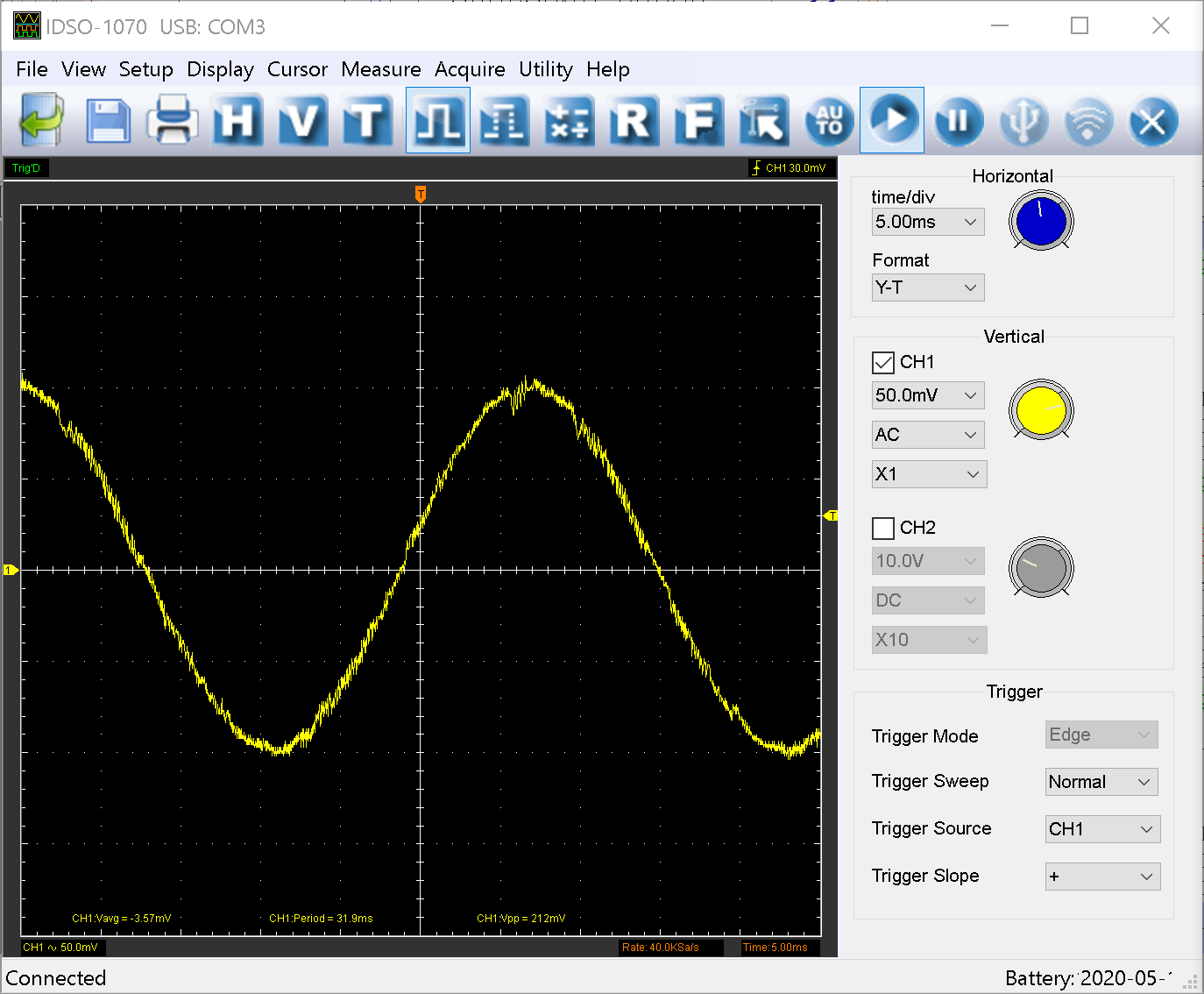
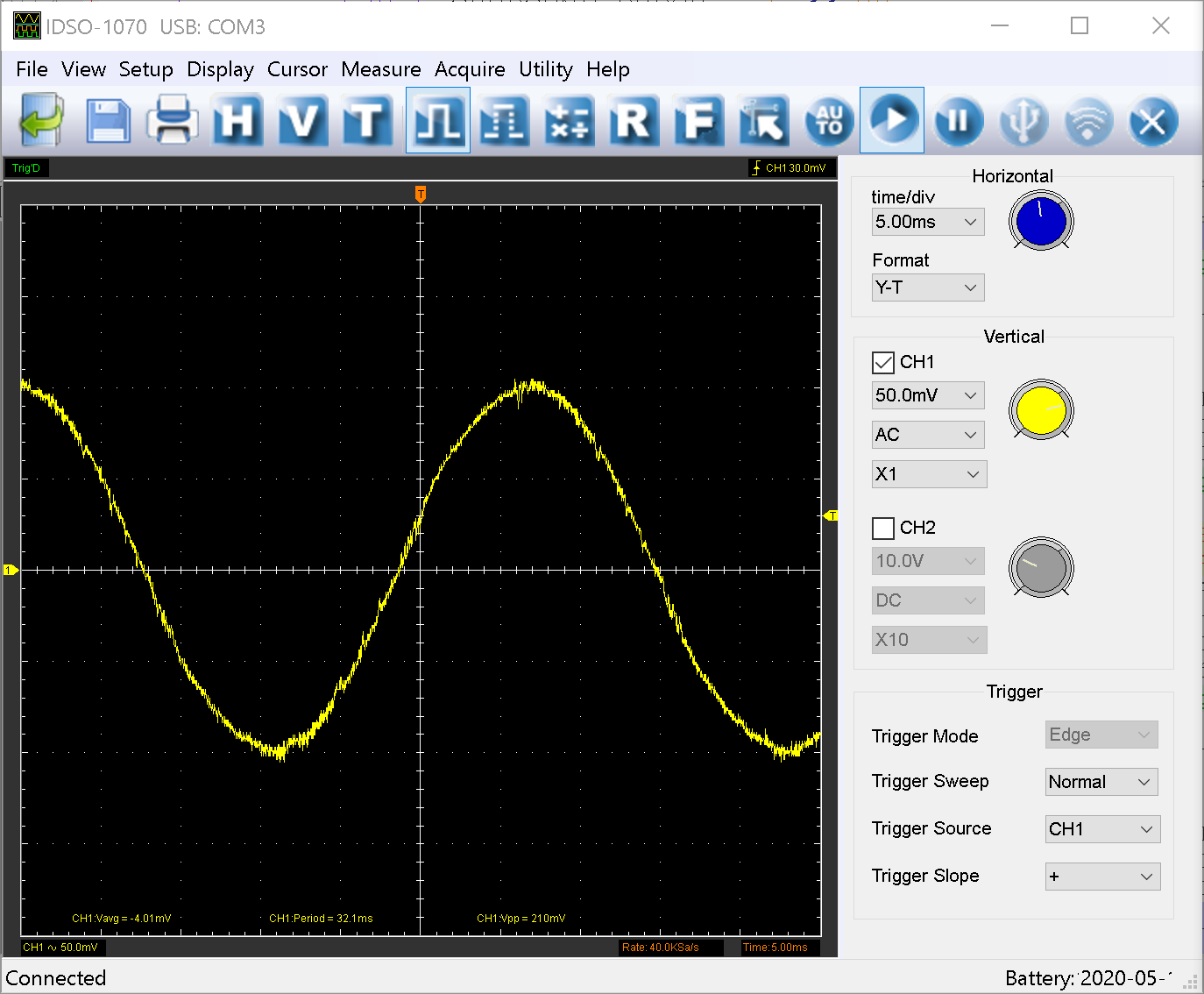
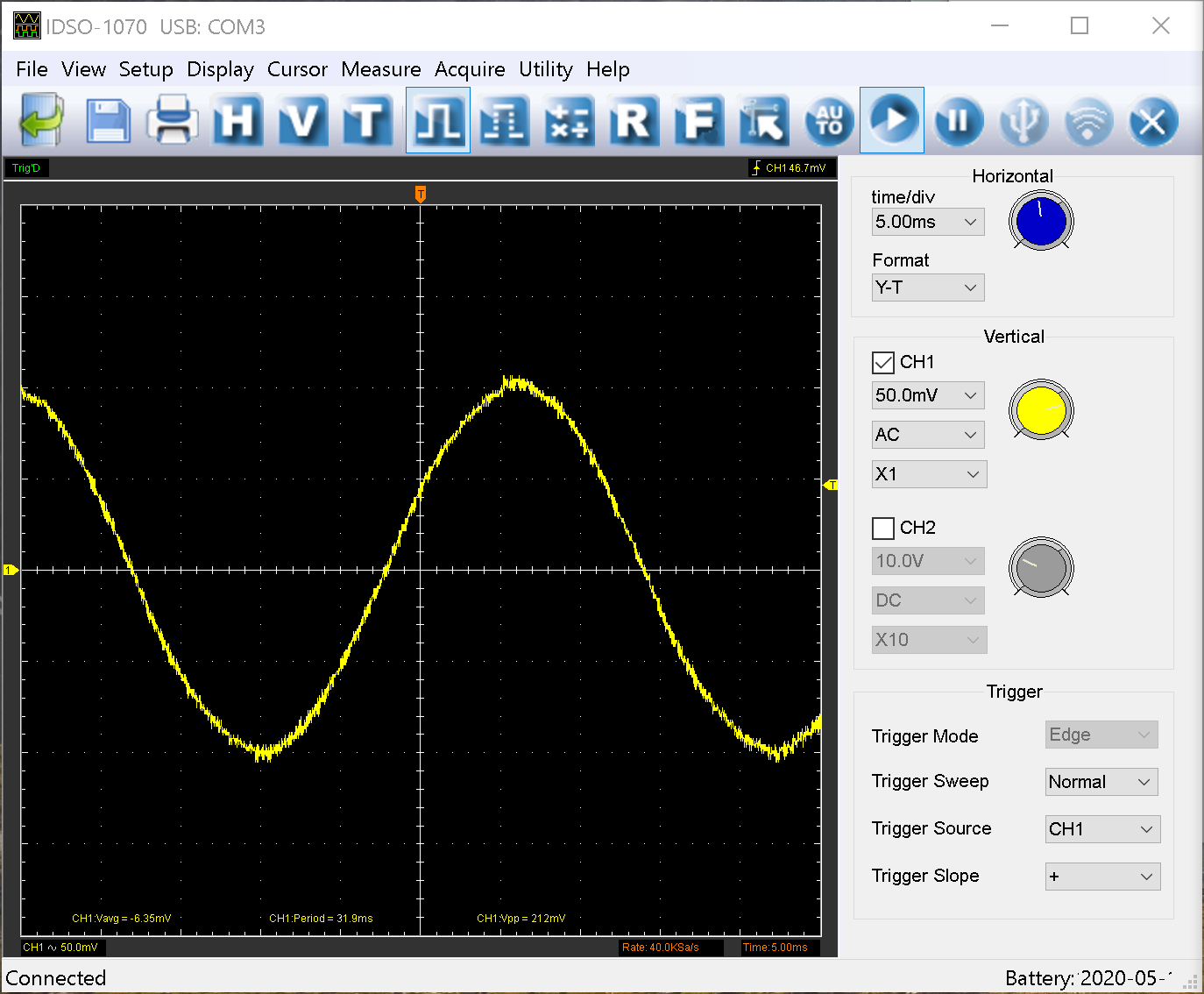
I found that setting TBL to 1 seems to yield the best result, which is why I also used this setting for the other drivers. Taking a look at higher velocities, we can see that this driver definitely performs worse:
Interestingly, P5 is the driver, which has this hole in the PCB to allow for a mechanical spacer.
To do for me: Split up the two expansion boards I have and insert both P6 steppers into the P5+P6 sockets on the Maestro. I'll see if I can manage on the weekend (although I am not sure how to do this exactly. Don't want to break anything).
To do for you guys: Please try to get your hands on the layout. This rough floorplan in the .pdf does not show any traces or ground planes.
-
Do you have identical stepper motors connected to P5 and P6?
-
I disconnected the cables from the motors and attached it to the same motor every time for the measurements.
[Edit]: I'll try and set everything up on the weekend. I think I will be able to conclude if it is a problem with the expansion or with my setup.
-
Do you find P5 noisier than P6 when driving the same motor at the same speed?
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42 yes. P6 is as quiet as the internal ones (more or less). P5 ist causing a lot of vibration and noise.
-
You said you have two expansion boards. Is P5 noisy on both of them?
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42 I just did the exercise and switched the expansion board. Same result.
I thought that it might be the cables. So I decided to switch those too. Also, I twisted the pairs, but that also did not have an impact.
Some more insight I have found: only one of the two current paths is affected. Output 1 of P5. Output 2 is fine. Somehow the upper (well, upper depends on your point of view, but it is clear what I mean
") ) part of the sine wave gets a bit chopped of output 1.
) part of the sine wave gets a bit chopped of output 1.Consequently, the two coils in the motor see a different current and hence are driven assymetrically. For me, it now looks like a bug (although it would be nice if someone else could try the same).
https://duet3d.dozuki.com/Wiki/Dual_Stepper_Driver_Expansion_Module
-
Okay. So I split up both of my expansions (one of which already had a groove and was easy, the other one was more work) and installed both "P6" to the Maestro.
Everything is running fine now!
")
Well, this concludes it for me. I have two leftover P5 - if someone is interested.

-
Replacing the controller on a Chinese IDEX printer with a Duet 2 Maestro + Stepper Driver Expansion and I've run into this same problem. P5 is VERY noisy when it switches to SpreadCycle mode. Sounds almost like the stepper is stalled and you can feel the carriage vibrate while moving. (double checked the wiring, haven't crossed anything...) I'm using the same stepper motor on the P0 channel, and P0 is silent.
Anyone figured out what's wrong with the P5 stepper driver on the expansion? Does it need some components replaced? (wrong Capacitor or resistor somewhere?)
For now I've worked around it by setting the "V" parameter to 25 so it says in Stealth chop for most moves. It also got better when I swapped the X1 and X2 motors and wires. The motors are the same part number but, the X2 motor has longer wires.
M569 P5 S1 D3 V25 ; physical drive 5 goes forwards E2 (Very noisy!) -
@BotLawson I think there is a flaw with the design of the expansion. Even P6 produces slightly worse results than the internal steppers.
As for P5, there might be a way to fix it by comparing the layout of P5 with P6 and find the difference. Still missing this file though.
From looking at the PCB, there is not much to observe between the two...
-
Do the passive components around the TMC2224 chip look identical on both parts of the boards that you have?
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com