Extruder motor doesn't move
-
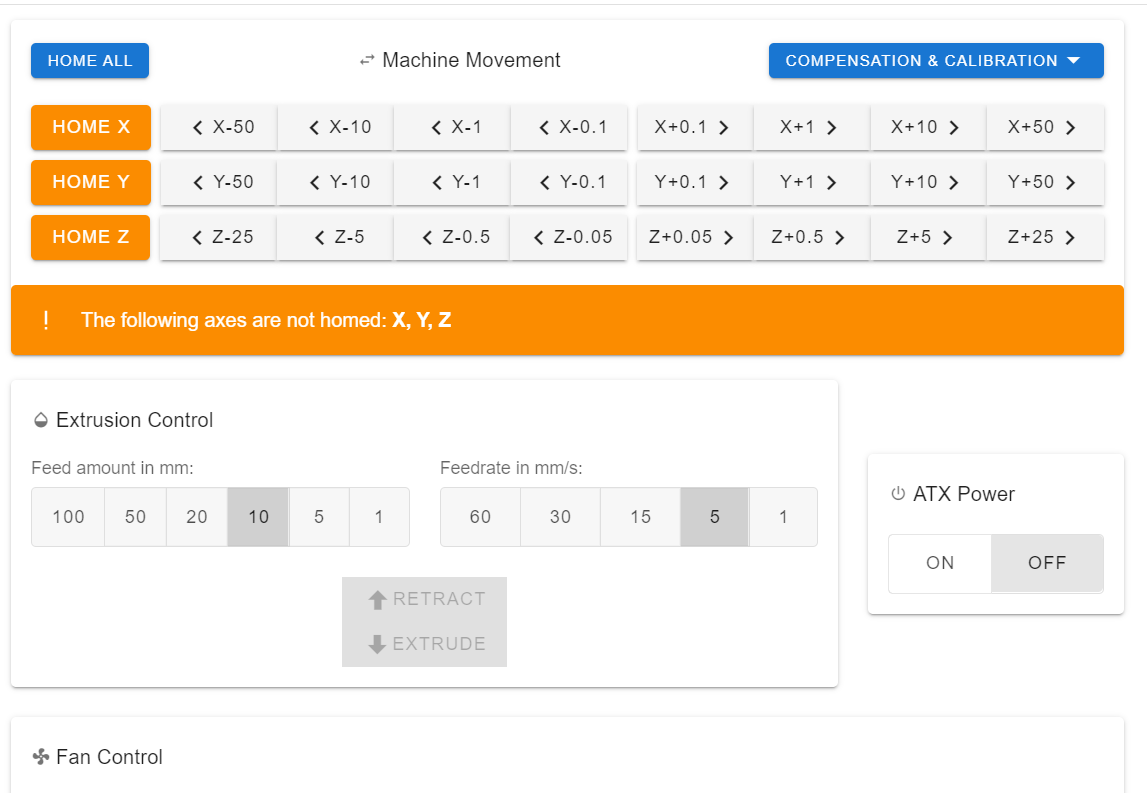
Hi, I'm using a Duet2 Ethernet board, I have my own PID controller for temperature control. After homing the xyz axis, I could not enable the 3d printer extruder. Like shown here in the photo. I don't know if the extruder motion is prohibited because hot end temperature doesn't reach a certain value, or there's something else wrong with my system. Please advise, thank you.
-
If the extruder is cold or to cold you can't move it hope this link helps you:
https://duet3d.dozuki.com/Wiki/Gcode#Section_M302_Allow_cold_extrudes
-
@siam Still not working. The retract and extrude control in extrusion control panel can't be active. Even I set M302 P1, the extruder control panel can't be use. In the E0 port of the board, I didn't see the red led is on after I plug the motor. In order to move the extruder, do I need set the temperature control input for the extruder heater?
I have another question for the external extruder heater PID control. I have an external PID temperature controller for the extruder head control. How can I interface with the external temperature controller with the duet board? -
@zfeng said in Extruder motor doesn't move:
How can I interface with the external temperature controller with the duet board?
You'd have to provide a lot more details on the external controller.
After sending M302 P1, try sending G1 E10 to see if the extruder will move.
-
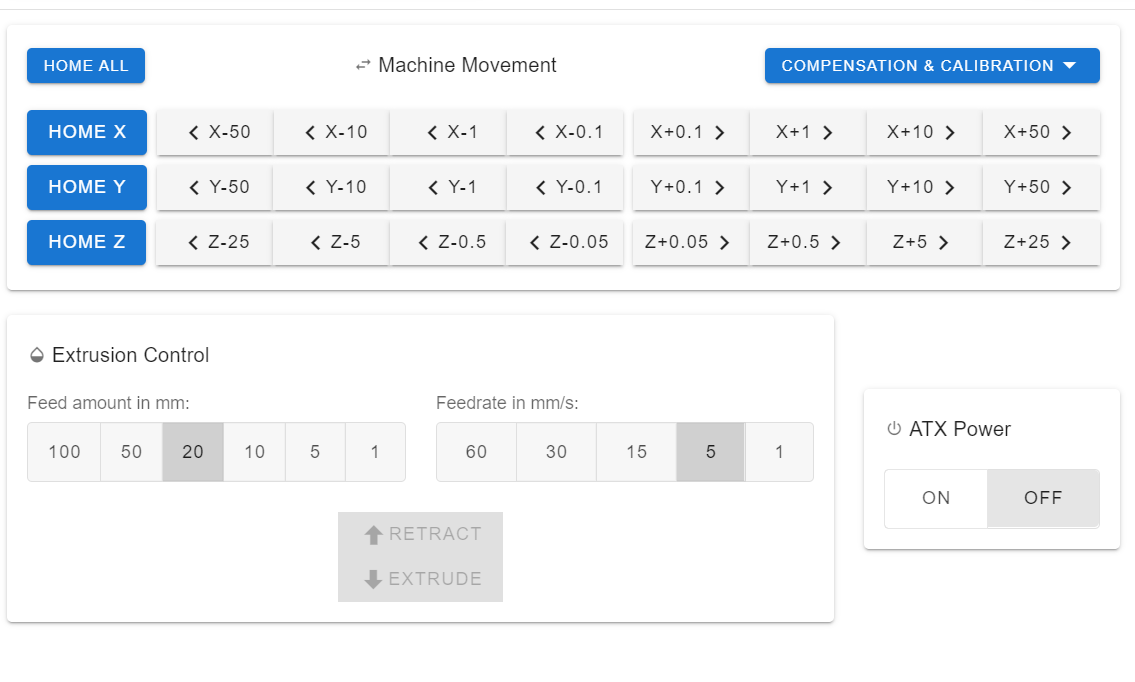
@phaedrux I tried G1 E10 code and yes the extruder moved a bit. But the extruder control section is still not active. The feed amount and feedrate can be selected, but the retract and extrude functions are down.
-
What firmware and DWC version are you running?
-
@phaedrux The firmware is 2.05, what is DWC?
-
@zfeng DWC is the web interface. For version go to System > General. There was one version that didn’t enable the buttons, so update to the version here: https://github.com/Duet3D/RepRapFirmware/releases/tag/2.05.1
Upload the file ‘DuetWebControl-SD-2.0.7.zip’ to the Duet in the system tab to update DWC.You can also update the firmware from 2.05 to 2.05.1 (this has a number of bug fixes) by uploading the Duet2CombinedFirmware.bin file.
If that doesn’t work, post your config.g file; maybe you have no tools defined.
Ian
Bed-slinger - Mini5+ WiFi/1LC | RRP Fisher v1 - D2 WiFi | Polargraph - D2 WiFi | TronXY X5S - 6HC/Roto | CNC router - 6HC | Tractus3D T1250 - D2 Eth
-
@droftarts I checked the version of the firmware is 2.05.1, and DWC is 2.0.7
-
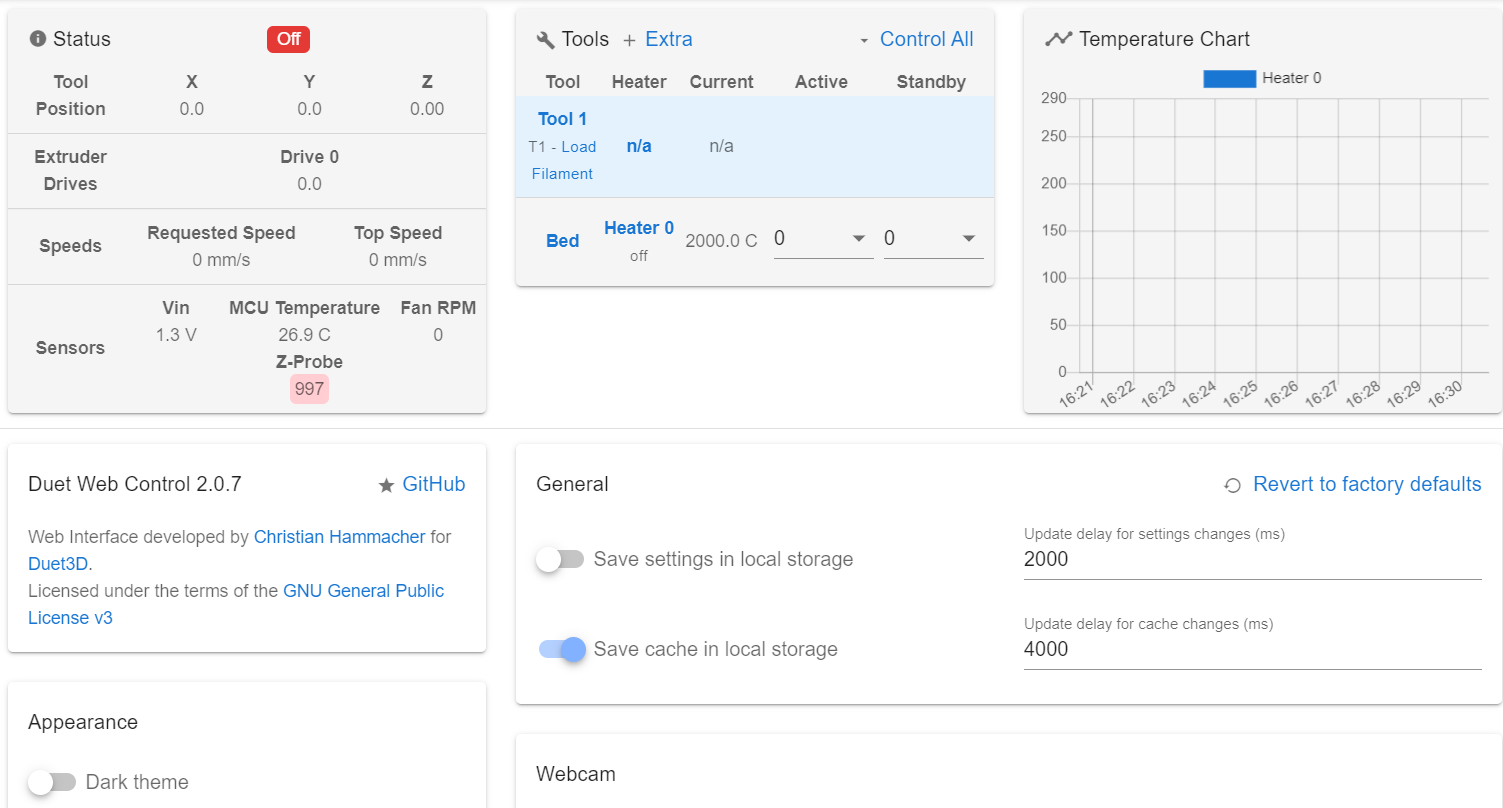
@zfeng post your config.g i can only see on your screenshot that you have not or not correct a thermistor or a heater configured
-
@siam 0:/sys/config.g
; Configuration file for Duet WiFi (firmware version 2.03)
; executed by the firmware on start-up
;
; generated by RepRapFirmware Configuration Tool v3.2.3 on Fri Jun 04 2021 14:52:41 GMT-0400 (Eastern Daylight Time); General preferences
G90 ; send absolute coordinates...
M83 ; ...but relative extruder moves
M550 P"MassiveDimension" ; set printer name; Network
M552 P0.0.0.0 S1 ; enable network and acquire dynamic address via DHCP
M586 P0 S1 ; enable HTTP
M586 P1 S0 ; disable FTP
M586 P2 S0 ; disable Telnet; Drives
M569 P0 S0 ; physical drive 0 goes backwards
M569 P1 S0 ; physical drive 1 goes backwards
M569 P2 S0 ; physical drive 2 goes backwards
M569 P5 S1 ; physical drive 5 goes forwards
M584 X0 Y1 Z2 E5 ; set drive mapping
M350 X16 Y16 Z16 E16 I1 ; configure microstepping with interpolation
M92 X80.00 Y80.00 Z400.00 E420.00 ; set steps per mm
M566 X900.00 Y900.00 Z60.00 E120.00 ; set maximum instantaneous speed changes (mm/min)
M203 X6000.00 Y6000.00 Z180.00 E1200.00 ; set maximum speeds (mm/min)
M201 X500.00 Y500.00 Z20.00 E250.00 ; set accelerations (mm/s^2)
M906 X800 Y800 Z800 E800 I30 ; set motor currents (mA) and motor idle factor in per cent
M84 S30 ; Set idle timeout; Axis Limits
M208 X0 Y0 Z0 S1 ; set axis minima
M208 X350 Y280 Z85 S0 ; set axis maxima; Endstops
M574 X1 Y1 Z1 S0 ; set active low and disabled endstops; Z-Probe
M558 P1 H5 F120 T6000 ; set Z probe type to unmodulated and the dive height + speeds
G31 P500 X0 Y0 Z2.5 ; set Z probe trigger value, offset and trigger height
M557 X15:215 Y15:195 S20 ; define mesh grid; Heaters
M305 P0 T100000 B4138 R4700 ; set thermistor + ADC parameters for heater 0
M143 H0 S120 ; set temperature limit for heater 0 to 120C; Fans
M106 P0 S0 I0 F500 H T45 ; set fan 0 value, PWM signal inversion and frequency. Thermostatic control is turned on
M106 P1 S1 I0 F500 H T45 ; set fan 1 value, PWM signal inversion and frequency. Thermostatic control is turned on; Tools
M563 P1 D0 F0 ; define tool 1
G10 P1 X0 Y0 Z0 ; set tool 1 axis offsets
G10 P1 R0 S0 ; set initial tool 1 active and standby temperatures to 0C; Custom settings are not defined
; Miscellaneous
T1 ; select first toolMassiveDimension
Send code...
Status
Off
Tool Position
X
0.0
Y
0.0
Z
0.00
Extruder Drives
Drive 0
0.0
Speeds
Requested Speed
0 mm/s
Top Speed
0 mm/s
Sensors
Vin
1.3 V
MCU Temperature
27.0 C
Fan RPM
0
Z-Probe
999
Tools
Extra
Control All
Tool Heater Current Active Standby
Tool 1
T1 - Load Filament n/a n/a
Bed Heater 0
off 2000.0 C
0
0
Temperature Chart
System Directory -
It looks like you have a bed heater defined, but not a tool heater. I can't recall but I think you might need to define a heater in RRF2.
Any reason you want to stay on RRF2?
-
@phaedrux What does RRF2 mean? Do I need to define tool heater before activating extruder? Can I bypass it?
-
RepRapFirmware 2 last version was 2.05.1 released over a year ago and no longer updated.
RepRapFirmware 3 is currently at version 3.2.2 and is actively being developed.
-
@phaedrux How can I upgrade my board to RRF3?
-
If you still have access to DWC. Upload these 3 zip files, one at a time in the system tab. Don't extract them. Reboot after each. Use M115 to verify the firmware has been applied.
https://github.com/Duet3D/RepRapFirmware/releases/download/2.05.1/Duet2Firmware-2.05.1.zip
https://github.com/Duet3D/RepRapFirmware/releases/download/3.0/Duet2and3Firmware-3.0.zip
https://github.com/Duet3D/RepRapFirmware/releases/download/3.2.2/Duet2and3Firmware-3.2.2.zip
That will get your firmware and DWC up to date.You can see the change logs here:
https://github.com/Duet3D/RepRapFirmware/wiki/Changelog-RRF-3.xFor your config, might be a good idea to run through the configurator tool and generate a fresh set for RRF3.
https://configtool.reprapfirmware.org/StartBackup your existing config files in the sys folder in case you want to switch back to RRF3. IT’s easy to switch back and forth, just upload the zip file for the version you want and then upload your config files.
These documents will come in handy during the conversion.
https://duet3d.dozuki.com/Wiki/RepRapFirmware_3_overview
https://duet3d.dozuki.com/Wiki/Gcode -
I also see from your Config that you are setting T1 as active but you only have T0 defined.
Maybe @droftarts or @Phaedrux can just confirm they are far more expert than I am!
-
@dougal1957 Almost. He is calling T1 at the end, but the tool he has defined is also T1. And the tool being defined doesn't have a heater assigned. I don't think that those things in themselves would cause a problem, but it's been a long time since I've used RRF2.
Updating to RRF3 and using a cleaned up config.g might do wonders either way.
-
@phaedrux I upgraded the firmware, but now I seem to have problem with the endstops. The settings for my endstops type before upgrading were all "active-low", and endstop location all at low-end. But after upgrading, the active-low button disappeared and I selected switch instead, but after updating the new config file, I could not homing any axis due to the G28X failed to enable endstops error.
-
Post your new config.g please.
I suspect that you'll just need to invert the signal by adding a
!to the pin name.M574 X1 S1 P"!xstop"