levelling and mesh
-
If you do a repeated G30 S-1 test at your probe points are the results consistent?
Is it possible to move the Z motors to the mainboard?
-
@MikeDC @Phaedrux Have a look at the David's answer in our thread about CAN delays with external boards:
@dc42 said:
I have put preliminary firmware that resolves this issue at https://www.dropbox.com/sh/cx760ysonlzzkjd/AACfsVfX4olHipuqmbWut5EKa?dl=0. Please test this firmware with care because I have only tested it using Duet 3 MB6HC + EXP3HC (the Z motor was connected to the EXP3HC).
If you are running your Duet with an attached Raspberry Pi then you must upgrade to RRF 3.4.0beta7 from the package server BEFORE you use these files.
Unfortunately we couldn't test it yet, so it's a good start point to see if this issue is addresed.
Best,
-
One simple change that may help is just reduce the probing speed a lot, so any delays result in smaller errors.
In the config you posted earlier it is 300; try 50 or even less and see how that works?
I only use 60 even with a directly wired BLTouch!
As long as the clearance height is not excessive, it should not make all that much difference in speed but could increase accuracy a lot.
Robert J.
Printers: Overlord pro, Kossel XL+ with Duet 6HC and "Frankentron", TronXY X5SA Pro converted to E3D toolchange with Duet 6HC and 1LC toolboards.
-
Ok with Z on the 3HC they was definately not consistent
I have now moved the 2 Y motors temporarily to the 3HC and moved the 3 Z motors back to the mainboard
I think this is clearly showing it a 3HC can issue
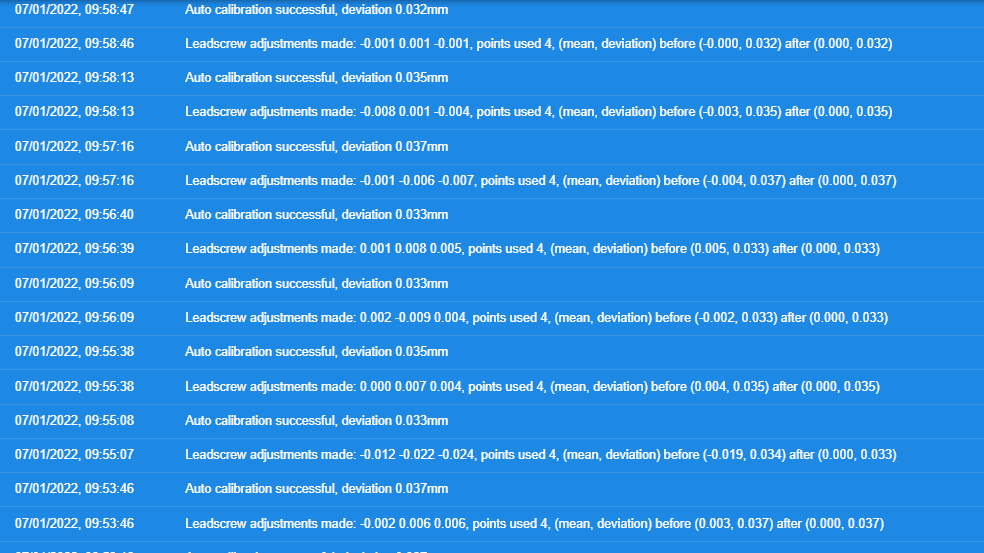
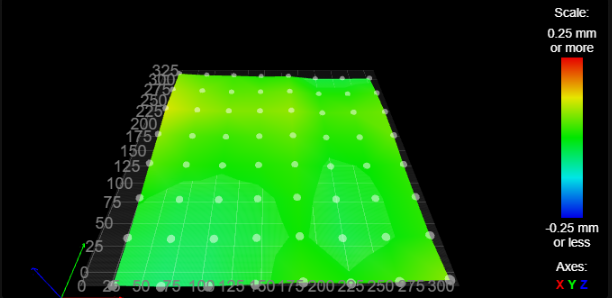
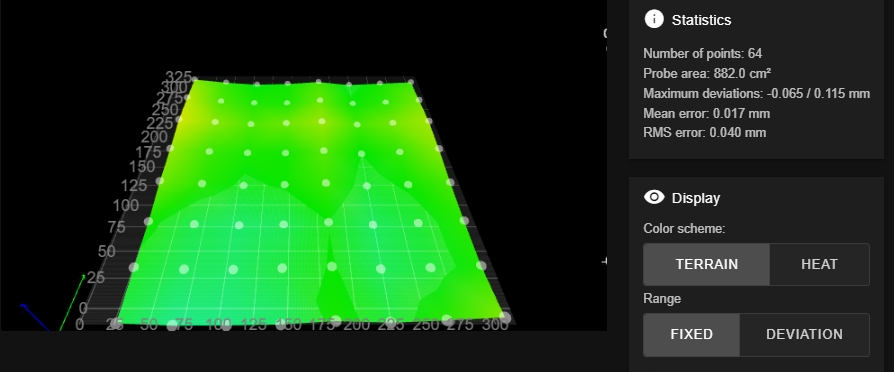
consistent probing even if its not the 0.016 i was getting previously
but at least its not going as high as 0.71-0.11 now and look at the difference in the mesh, the 0.2mm difference front to back is gone. -
This post is deleted! -
@marcossf said in levelling and mesh:
@MikeDC @Phaedrux Have a look at the David's answer in our thread about CAN delays with external boards:
@dc42 said:
I have put preliminary firmware that resolves this issue at https://www.dropbox.com/sh/cx760ysonlzzkjd/AACfsVfX4olHipuqmbWut5EKa?dl=0. Please test this firmware with care because I have only tested it using Duet 3 MB6HC + EXP3HC (the Z motor was connected to the EXP3HC).
If you are running your Duet with an attached Raspberry Pi then you must upgrade to RRF 3.4.0beta7 from the package server BEFORE you use these files.
Unfortunately we couldn't test it yet, so it's a good start point to see if this issue is addresed.
Best,
I will definately test these files next thankyou
-
@rjenkinsgb said in levelling and mesh:
One simple change that may help is just reduce the probing speed a lot, so any delays result in smaller errors.
In the config you posted earlier it is 300; try 50 or even less and see how that works?
I only use 60 even with a directly wired BLTouch!
As long as the clearance height is not excessive, it should not make all that much difference in speed but could increase accuracy a lot.
I have already tried this, It doesnt help the inconsistancy,
Thankyou for the suggestion tho -
@mikedc said in levelling and mesh:
If the motors are delaying then i cannot put x or y or e here either as they will all have differing issues.
I believe the firmware limitation is purely limited to probing moves as the motors will keep moving until the probe triggers and register their position (I.e. an unplanned event), whereas normal xy moves are all preplanned so can be synchronised between the boards. This seems to match what you are seeing
-
@engikeneer I agree,
I started a print around an hour ago, first one since i added the 3hc board.
with Z on the 3hc and the levels and mesh i dare not try printing,
but with the 2 Y motors on the board it seemed more stable so have started a print and so far its looking ok.maybe one small alignment issue at the start of the print, between the brim and the part but i need to wait for it to finish to check it properly.
-
It is fixed in B7+2
")
see my post herehttps://forum.duet3d.com/topic/25720/g30-stop-values-increasing-each-time/26?_=1641577026578
to confirm, Z is back on 3HC and multiprobing each point is giving good results again.

-
 undefined Phaedrux marked this topic as a question
undefined Phaedrux marked this topic as a question
-
undefined Phaedrux has marked this topic as solved