Only one Driver working
-
Hello,
I have a Duet3 6HC for my Printer. Used a MKS Sbase 1.3 with external drivers before.
I use Nema17 motors in X (2 parallel) and Y (4 parallel) and 2 Nema 34 (parallel) in Z axis.
The printer is pretty big, thats why I need the Nema 34.Everything is working except the movement of the motors.
Problem 1: X and Y Axis
The Driver 0.1 is working fine. I can plug the X or Y axis on this Driver and they work how they should.
So I assume my wiring of the X/Y motors is correct.When I decline the motor to a different driver and connect them to it and want to home/move I get the message:
Driver 0.X warning: phase A may be disconnected, phase B may be disconnected
This appears at all drivers I decline in the config.
Endstops are plugged and working. Extruder motor is working as well.
Problem 2: Z Axis
It doesnt matter on which driver I decline the Z Axis I always get this message:
Warning: Driver 0.2 warning: phase A short to ground, phase B short to ground, phase B may be disconnected
Here is my config:
; Configuration file for Duet 3 (firmware version 3.3)
; executed by the firmware on start-up
;
; generated by RepRapFirmware Configuration Tool v3.3.10 on Mon May 02 2022 14:06:34 GMT+0200 (Mitteleuropäische Sommerzeit); General preferences
G90 ; send absolute coordinates...
M83 ; ...but relative extruder moves
M550 P"FARO" ; set printer name; Network
M552 P0.0.0.0 S1 ; enable network and acquire dynamic address via DHCP
M586 P0 S1 ; enable HTTP
M586 P1 S0 ; disable FTP
M586 P2 S0 ; disable Telnet; Drives
M569 P0.0 S1 ; physical drive 0.0 goes forwards
M569 P0.1 S1 ; physical drive 0.1 goes forwards
M569 P0.2 S1 ; physical drive 0.2 goes forwards
M569 P0.3 S1 ; physical drive 0.3 goes forwards
M584 X0.0 Y0.1 Z0.2 E0.3 ; set drive mapping
M350 X16 Y16 Z16 E16 I1 ; configure microstepping with interpolation
M92 X40.00 Y40.00 Z400.00 E420.00 ; set steps per mm
M566 X900.00 Y900.00 Z60.00 E120.00 ; set maximum instantaneous speed changes (mm/min)
M203 X6000.00 Y6000.00 Z180.00 E1200.00 ; set maximum speeds (mm/min)
M201 X500.00 Y500.00 Z16.00 E250.00 ; set accelerations (mm/s^2)
M906 X1600 Y1600 Z3600 E800 I30 ; set motor currents (mA) and motor idle factor in per cent
M84 S60 ; Set idle timeout; Axis Limits
M208 X0 Y0 Z0 S1 ; set axis minima
M208 X1000 Y1000 Z1000 S0 ; set axis maxima; Endstops
M574 X1 S1 P"io0.in" ; configure switch-type (e.g. microswitch) endstop for low end on X via pin io0.in
M574 Y1 S1 P"io1.in" ; configure switch-type (e.g. microswitch) endstop for low end on Y via pin io1.in
M574 Z1 S1 P"io2.in" ; configure switch-type (e.g. microswitch) endstop for low end on Z via pin io2.in; Z-Probe
M558 P0 H5 F120 T3000 ; disable Z probe but set dive height, probe speed and travel speed
M557 X15:215 Y15:195 S20 ; define mesh grid; Heaters
M308 S0 P"temp0" Y"thermistor" T100000 B3960 ; configure sensor 0 as thermistor on pin temp0
M950 H0 C"out0" T0 ; create bed heater output on out0 and map it to sensor 0
M307 H0 B0 S1.00 ; disable bang-bang mode for the bed heater and set PWM limit
M140 H0 ; map heated bed to heater 0
M143 H0 S100 ; set temperature limit for heater 0 to 100C
M308 S1 P"temp1" Y"thermistor" T100000 B4138 ; configure sensor 1 as thermistor on pin temp1
M950 H1 C"out1" T1 ; create nozzle heater output on out1 and map it to sensor 1
M307 H1 B0 S1.00 ; disable bang-bang mode for heater and set PWM limit
M143 H1 S280 ; set temperature limit for heater 1 to 280C; Fans
M950 F0 C"out4" Q500 ; create fan 0 on pin out4 and set its frequency
M106 P0 S0 H-1 ; set fan 0 value. Thermostatic control is turned off
M950 F1 C"out5" Q500 ; create fan 1 on pin out5 and set its frequency
M106 P1 S1 H1 T45 ; set fan 1 value. Thermostatic control is turned on; Tools
M563 P0 D0 H1 F0 ; define tool 0
G10 P0 X0 Y0 Z0 ; set tool 0 axis offsets
G10 P0 R0 S0 ; set initial tool 0 active and standby temperatures to 0C; Custom settings are not defined
You guys have any Idea what I can do to make it work?
Thank you in advance
")
Best regards,
Fabian -
can you add high res photos of your board -- back and front, as well as the connectors for the motors?
-
@fabian-du Are you connecting the Nema 34 directly to the duet board?
-
Can you send M122 and M98 P"config.g" in the gcode console and share the results here?
When and where did you purchase the Duet?It's hard to tell from your description whether the drivers working or not is configuration dependant. For instance, the Z axis won't work even on a driver that did work for the X axis?
I use Nema17 motors in X (2 parallel) and Y (4 parallel)
The motors are wired in parallel? Have you tested individual motors?
-
Hi,
thank you for the fast respond
Here is the M122:
M122
=== Diagnostics ===
RepRapFirmware for Duet 3 MB6HC version 3.4.0 (2022-03-15 18:57:24) running on Duet 3 MB6HC v1.01 or later (standalone mode)
Board ID: 08DJM-956BA-NA3TJ-6JKF0-3S86Q-1V9GT
Used output buffers: 1 of 40 (25 max)
=== RTOS ===
Static ram: 151000
Dynamic ram: 95932 of which 0 recycled
Never used RAM 103740, free system stack 206 words
Tasks: NETWORK(ready,26.6%,251) ETHERNET(notifyWait,0.2%,168) HEAT(notifyWait,0.0%,347) Move(notifyWait,0.0%,352) CanReceiv(notifyWait,0.0%,944) CanSender(notifyWait,0.0%,374) CanClock(delaying,0.0%,333) TMC(notifyWait,7.9%,92) MAIN(running,65.3%,1087) IDLE(ready,0.0%,30), total 100.0%
Owned mutexes:
=== Platform ===
Last reset 00:04:11 ago, cause: power up
Last software reset at 2022-05-02 13:15, reason: User, GCodes spinning, available RAM 103596, slot 1
Software reset code 0x0003 HFSR 0x00000000 CFSR 0x00000000 ICSR 0x00400000 BFAR 0x00000000 SP 0x00000000 Task MAIN Freestk 0 n/a
Error status: 0x00
Step timer max interval 126
MCU temperature: min 42.6, current 42.9, max 43.0
Supply voltage: min 24.5, current 24.5, max 24.5, under voltage events: 0, over voltage events: 0, power good: yes
12V rail voltage: min 12.1, current 12.1, max 12.1, under voltage events: 0
Heap OK, handles allocated/used 0/0, heap memory allocated/used/recyclable 0/0/0, gc cycles 0
Events: 0 queued, 0 completed
Driver 0: standstill, SG min n/a, mspos 8, reads 19616, writes 0 timeouts 0
Driver 1: standstill, SG min n/a, mspos 8, reads 19616, writes 0 timeouts 0
Driver 2: standstill, SG min n/a, mspos 8, reads 19617, writes 0 timeouts 0
Driver 3: standstill, SG min n/a, mspos 8, reads 19617, writes 0 timeouts 0
Driver 4: standstill, SG min n/a, mspos 8, reads 19617, writes 0 timeouts 0
Driver 5: standstill, SG min n/a, mspos 8, reads 19616, writes 0 timeouts 0
Date/time: 2022-05-03 09:37:30
Slowest loop: 2.90ms; fastest: 0.05ms
=== Storage ===
Free file entries: 10
SD card 0 detected, interface speed: 25.0MBytes/sec
SD card longest read time 2.3ms, write time 0.0ms, max retries 0
=== Move ===
DMs created 125, segments created 0, maxWait 0ms, bed compensation in use: none, comp offset 0.000
=== MainDDARing ===
Scheduled moves 0, completed 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1
=== AuxDDARing ===
Scheduled moves 0, completed 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1
=== Heat ===
Bed heaters 0 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1, chamber heaters -1 -1 -1 -1, ordering errs 0
=== GCodes ===
Segments left: 0
Movement lock held by null
HTTP is idle in state(s) 0
Telnet is idle in state(s) 0
File is idle in state(s) 0
USB is idle in state(s) 0
Aux is idle in state(s) 0
Trigger is idle in state(s) 0
Queue is idle in state(s) 0
LCD is idle in state(s) 0
SBC is idle in state(s) 0
Daemon is idle in state(s) 0
Aux2 is idle in state(s) 0
Autopause is idle in state(s) 0
Code queue is empty
=== CAN ===
Messages queued 31, received 0, lost 0, boc 0
Longest wait 0ms for reply type 0, peak Tx sync delay 0, free buffers 50 (min 50), ts 17/0/0
Tx timeouts 0,0,17,0,0,14 last cancelled message type 30 dest 127
=== Network ===
Slowest loop: 1.92ms; fastest: 0.02ms
Responder states: HTTP(0) HTTP(0) HTTP(0) HTTP(0) HTTP(0) HTTP(0) FTP(0) Telnet(0), 0 sessions Telnet(0), 0 sessions
HTTP sessions: 1 of 8- Ethernet -
State: active
Error counts: 0 0 1 0 0
Socket states: 5 2 2 2 2 0 0 0
M98:
M98 P"config.g"
HTTP is enabled on port 80
FTP is disabled
TELNET is disabledYes I tried to use only one motor for the X Axis on the other drivers, still only working on driver 0.1.
I bought the duet some month ago from a german reseller CR3D. Use the duet since one week or so.
When I use the Z motors on the working Driver 0.1 i get this message:
Warning: Driver 0.1 warning: phase A short to Vin, phase B may be disconnected
3.5.2022, 09:48:57 Error: Driver 0.1 error: phase A short to VinChanged the steps, acceleration etc. to the suitable values for the Z axis.
Is it even possible to run the Nema 34 with the board or do I need a extension board or something?
Also thought about going back to the external drivers, so I will need the extension board anyway...Here are the pictures of the board:


- Ethernet -
-
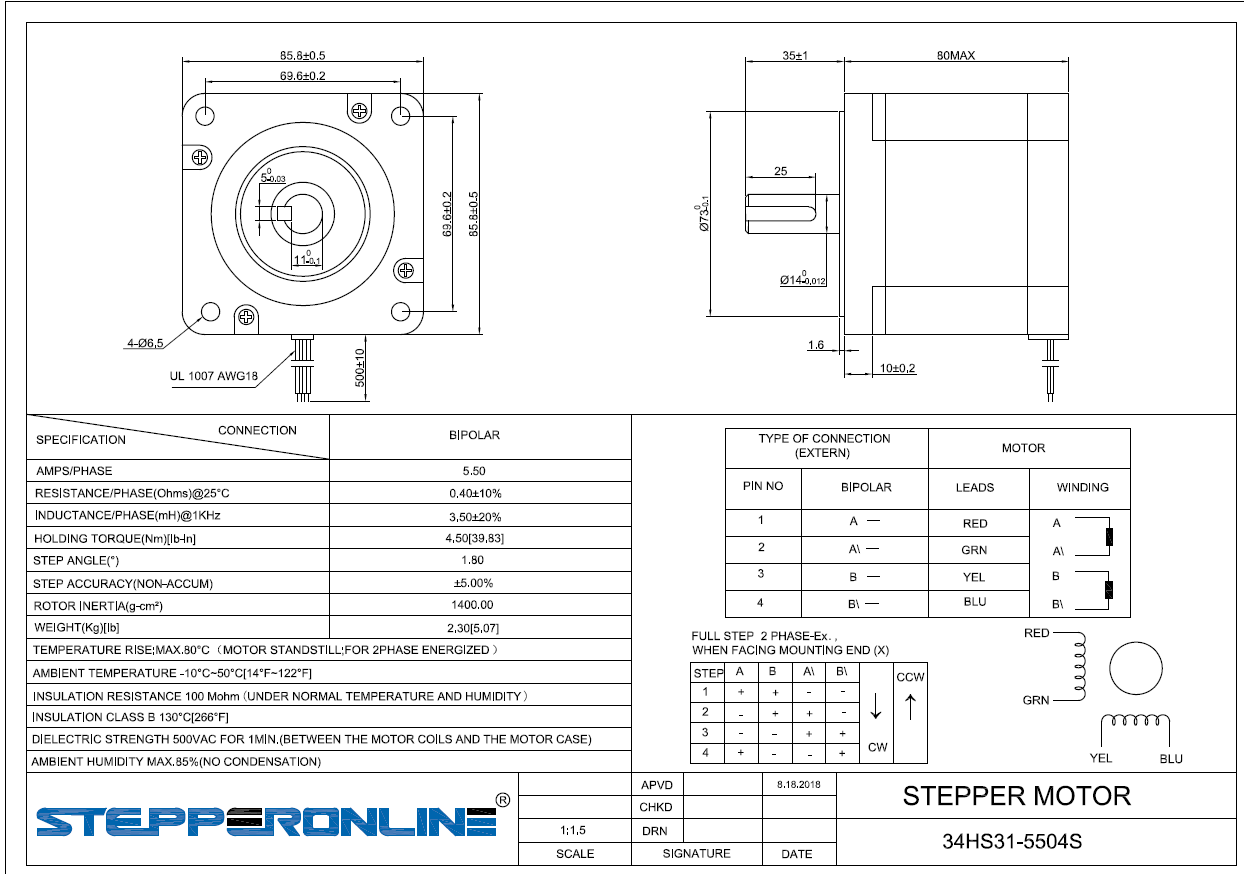
what are the specs of your nema34?
-
Here is the data sheet of the steppers for the Z axis.
-
You'd have to put your details into the EMF calculator to see if your voltage/movement speed combo for that motor is going to work.
https://www.reprapfirmware.org/emf.html
Running the motors in parallel also complicate the matter. Have you tested them wired independently yet?
-
Hi,
i used my numbers in the tool. It should work with my specs.
When I use one motor its still the same problem.
Also tried it with a NEMA 23 motor, still not working:Warning: Driver 0.2 warning: phase A short to ground, phase B short to ground, phase B may be disconnected
Its so strange that only Driver 0.1 is working, also with the X/Y axis.
When I use the NEMA 23 with this driver, its working.You think the board could be damaged or something?
Still its unlikely that 5 drivers are broken, no? -
@fabian-du This may sound silly, but check that you are connecting the motor to the correct driver on the board. The order of the drivers on the board is not intuitive:
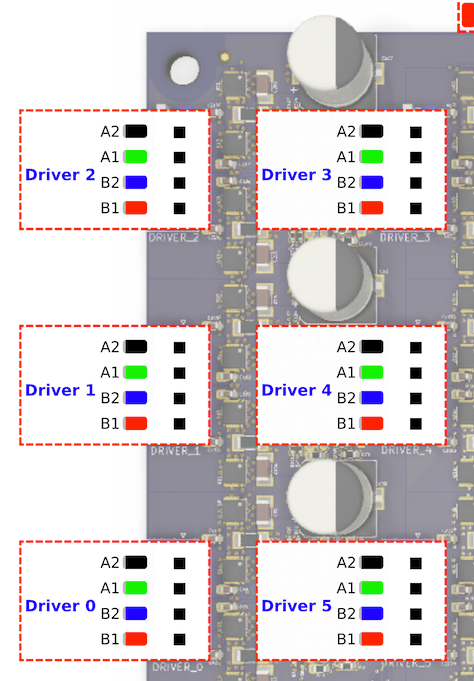
You may have assumed driver 0 is next to driver 3, eg:top of PCB edge of PCB Driver 0 Driver 3 Driver 1 Driver 4 Driver 2 Driver 5 But actually driver 2 is. This would explain why driver 1 (it's in the middle) and the extruder (driver 3) works (I think you said this works?), but driver 0 and 2 don't (they are swapped).
Ian
Bed-slinger - Mini5+ WiFi/1LC | RRP Fisher v1 - D2 WiFi | Polargraph - D2 WiFi | TronXY X5S - 6HC/Roto | CNC router - 6HC | Tractus3D T1250 - D2 Eth
-
Hi,
yes the swapped drivers would´ve made sense.
But I understood the positioning right, as shown in the first picture.My Z Axis with the Nema 34 motors now also works in parallel with the driver 0.1 (middle, outside of the board) with the same settings I use for X and Y.
So i set the same numbers for all drivers:; Drives
M569 P0.0 S1 ; physical drive 0.0 goes forwards
M569 P0.1 S1 ; physical drive 0.1 goes forwards
M569 P0.2 S1 ; physical drive 0.2 goes forwards
M569 P0.3 S1 ; physical drive 0.3 goes forwards
M584 X0.0 Y0.1 Z0.2 E0.3 ; set drive mapping
M350 X16 Y16 Z16 E16 I1 ; configure microstepping with interpolation
M92 X160.00 Y160.00 Z160.00 E420.00 ; set steps per mm
M566 X900.00 Y900.00 Z900.00 E120.00 ; set maximum instantaneous speed changes (mm/min)
M203 X6000.00 Y6000.00 Z6000.00 E1200.00 ; set maximum speeds (mm/min)
M201 X500.00 Y500.00 Z500.00 E250.00 ; set accelerations (mm/s^2)
M906 X1600 Y1600 Z1600 E800 I30 ; set motor currents (mA) and motor idle factor in per cent
M84 S60 ; Set idle timeoutIts still only the driver 0.1 which is working.
Tried to use the Z and Y Axis in driver 0.0 and 0.2 and vice versa.
Still the same error.Since the motors are working with driver 0.1, my wiring should be right.
The config for all axes are also the same, so I´m pretty clueless what else I could try out. -
Please send an email to warranty@duet3d.com and CC your reseller. Include a link to this forum thread and the details of your original purchase. You'll receive a reply with a form to fill out.
-
 undefined jay_s_uk referenced this topic
undefined jay_s_uk referenced this topic