Calibrating steps/mm
-
When I completed the steps/mm calibration and I run code, like the homing code, then the distance is completely wrong.
Any advice.
Thanks -
What type of mechanism? What distance is "wrong" when homing?
Steps per mm is normally a simple function of the pulley teeth, belt pitch, and steps/rev of the motor.
-
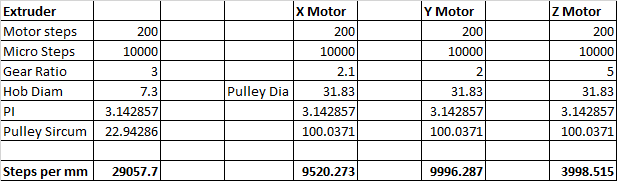
I am using external drivers. All my final drive pulleys are HTD5 20 tooth. I do not get any consistency with the distance the axis move.
See calculations below.
-
If you are using external drivers then you will need to use a T parameter on the M569 commands for those drivers, because the default width of the step pulses generated is fine for the built-in TMC2660 drivers but too short for almost all external drivers. See https://duet3d.dozuki.com/Wiki/Using_external_stepper_motor_drivers#Section_Configuring_the_Enable_polarity_and_step_timing.
-
Settings I am using now. Can the T setting influence the accuracy of my steps?
M569 P0 S1 ; Drive 0 goes forwards
M569 P1 S1 ; Drive 1 goes forwards
M569 P2 S1 ; Drive 2 goes forwards
M569 P3 S1 ; Drive 3 goes forwards
M569 P5 S1 R1 T2.5:2.5:5:2.5
M569 P6 S1 R1 T2.5:2.5:5:2.5
M569 P7 S0 R1 T2.5:2.5:5:2.5
M569 P8 S0 R1 T2.5:2.5:5:2.5
M584 X5 Y6 Z7 E8 -
If the T values are too small then you can miss steps.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
What is the external drive micro step set at? you have 10,000 miro-steps per revolution listed in you post, so micro step setting is 50?
-

-
Have you tried using 1/16 micro-stepping instead of 1/50th? if that works that may tell you there is an issue with the signal frequency / pulse width.
-
@nz_andy said in Calibrating steps/mm:
What is the external drive micro step set at? you have 10,000 miro-steps per revolution listed in you post, so micro step setting is 50?
Good spot. That could well be the OP's problem as 50x micro stepping isn't a supported mode - see documentation here https://duet3d.dozuki.com/Wiki/GCode#Section_M350_Set_microstepping_mode.
-
Thanks for noticing the error in my calculation. I am using external drivers and are not using the M350 command.
-
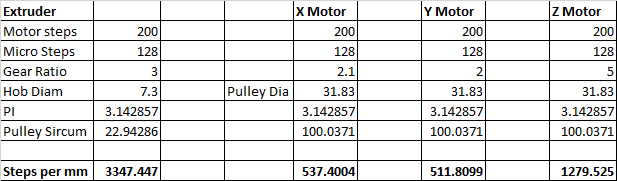
@jddt Changed to 128 Micro Steps
-
What is the max T values you suggest to be safe?
-
@jddt said in Calibrating steps/mm:
What is the max T values you suggest to be safe?
High T values will limit the maximum step pulse frequency. I doubt that any stepper drivers need greater than T10.
-
The motors started to work properly with a value of T5
-
According to the datasheet, T2.5:2.5:5:0 should work.