Hi,
I have a rotary axis with a Nema 17 stepper motor with a 500 cpr differential encoder with zero impulse (but as suggested only a+,b+ and power connected). Firmware is 3.4.1 rc1.
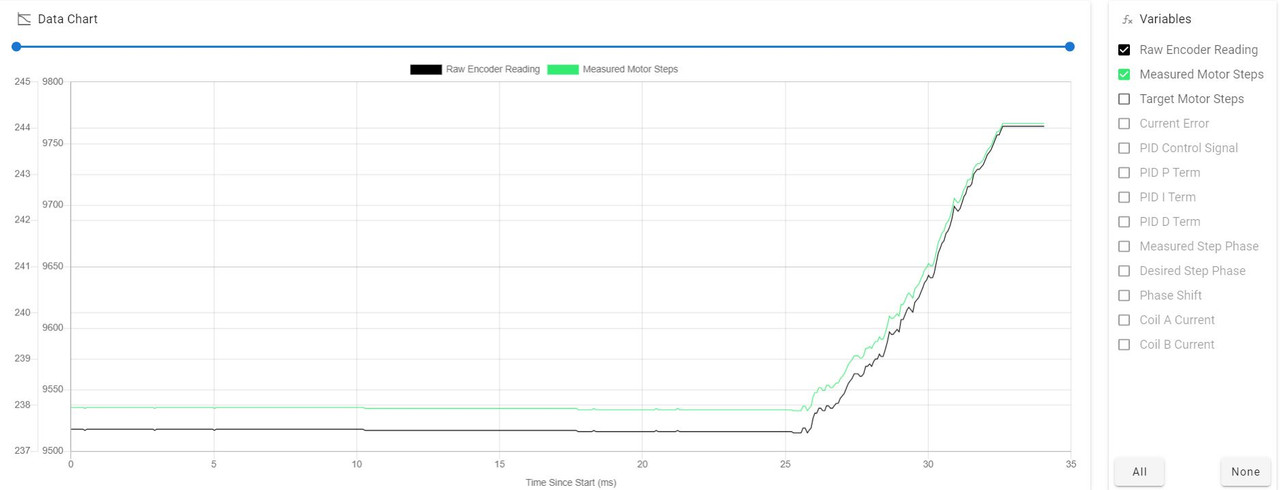
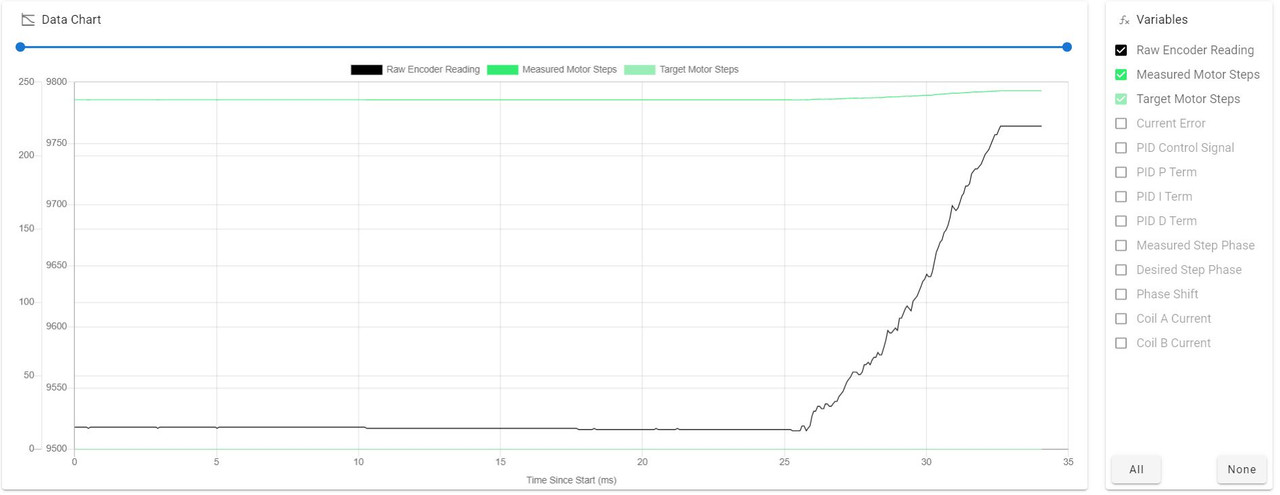
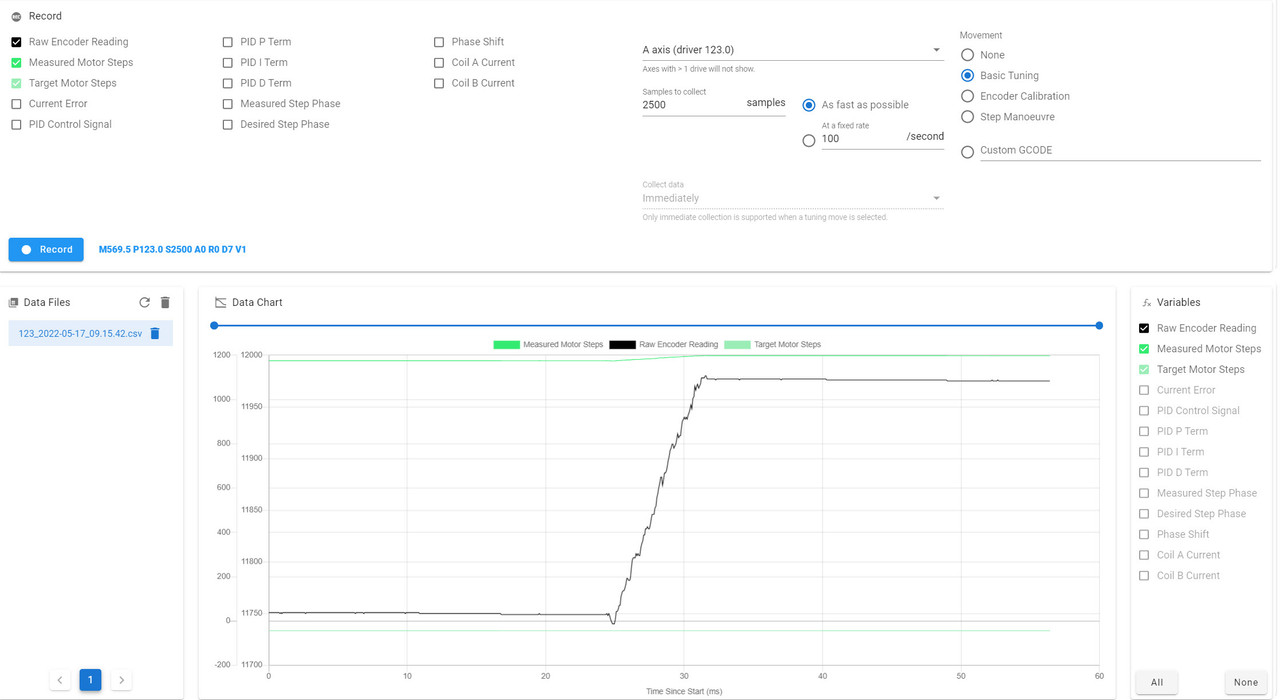
Unfortunately I do not even pass basic tuning with this setup, but the motor moves apparently as expected (have seen this manoveur already on working motor). Might be something with the encoder? Cables are long (2m), but shielded and grounded at supply side.
The error message is:
Warning: Driver 123.0 warning: tuning failed
Warning: Driver 123.0 new tuning error(s): The measured motion was inconsistent.
Can you see what the problem is ?

Thanks,
wiego
....
config.g:
; General preferences
G90 ; send absolute coordinates...
M83 ; ...but relative extruder moves
M550 P"ClosedLoopTest" ; set device name
; Wait a moment for the CAN expansion boards to start
G4 S2
; Network
M552 P192.168.1.177 S1 ; enable network and set IP address
M553 P255.255.255.0 ; set netmask
M586 P0 S1 ; enable HTTP
; closed loop
M569.1 P123.0 T2 C2.5 R100 I0 D0
M569 P123.0 S1 D2
M584 A123.0 ; set drive mapping
M917 A0
M350 A16 I0 ; configure microstepping without interpolation
M92 A3200 ; set steps per mm
M566 A1000 ; set maximum instantaneous speed changes (mm/min)
M203 A1500 ; set maximum speeds (mm/min)
M201 A1000 ; set accelerations (mm/s^2)
M906 A1000 I30 ; set motor currents (mA) and motor idle factor in per cent
M84 S30 ; Set idle timeout
M208 A0 S1 ; set axis minima
M208 A1000 S0 ; set axis maxima
homea.g
; homea.g
;setup
M569 P123.0 D2
G91 ; relative positioning
;G1 A360 F2000
G90
M400
M569 P123.0 D4 S0 ; Configure the motor on the 1HCL at can address 50 as being in closed-loop drive mode (D4) and not reversed (S1)
M569.6 P123.0 V31
;G1 A0
;cleanup
G92 A0 ; set zero coordinate system for this axis
M122 for 1HCL:
Diagnostics for board 123:
Duet EXP1HCL firmware version 3.4.1rc1 (2022-05-03 09:32:27)
Bootloader ID: SAME5x bootloader version 2.4 (2021-12-10)
All averaging filters OK
Never used RAM 52288, free system stack 178 words
Tasks: Move(notifyWait,0.0%,152) HEAT(notifyWait,0.0%,78) CanAsync(notifyWait,0.0%,70) CanRecv(notifyWait,0.0%,79) CanClock(notifyWait,0.0%,70) TMC(notifyWait,34.2%,358) CLSend(notifyWait,0.0%,132) MAIN(running,64.0%,407) IDLE(ready,0.0%,30) AIN(notifyWait,1.7%,265), total 100.0%
Last reset 01:11:31 ago, cause: power up
Last software reset data not available
Closed loop enabled: yes, pre-error threshold: 0.00, error threshold: 0.00, encoder type rotaryQuadrature, reverse polarity: no, position 6960, raw count = 7410, tuning mode: 0, tuning error: 0x10, collecting data: no
Control loop runtime (ms): min=0.003, max=0.029, frequency (Hz): min=11538, max=17442
Driver 0: pos 0, 3200.0 steps/mm,tuning failed, SG min 0, mspos 8, reads 36336, writes 55440 timeouts 0, steps req 0 done 0
Moves scheduled 0, completed 0, in progress 0, hiccups 0, step errors 0, maxPrep 0, maxOverdue 0, maxInc 0, mcErrs 0, gcmErrs 0
Peak sync jitter -10/10, peak Rx sync delay 195, resyncs 0/0, no step interrupt scheduled
VIN voltage: min 12.2, current 24.2, max 24.3
V12 voltage: min 10.4, current 12.1, max 12.1
MCU temperature: min 32.8C, current 33.4C, max 33.9C
Last sensors broadcast 0x00000000 found 0 218 ticks ago, 0 ordering errs, loop time 0
CAN messages queued 69642, send timeouts 0, received 21697, lost 0, free buffers 37, min 37, error reg 0
dup 0, oos 0/0/0/0, bm 0, wbm 0, rxMotionDelay 0

 :
: