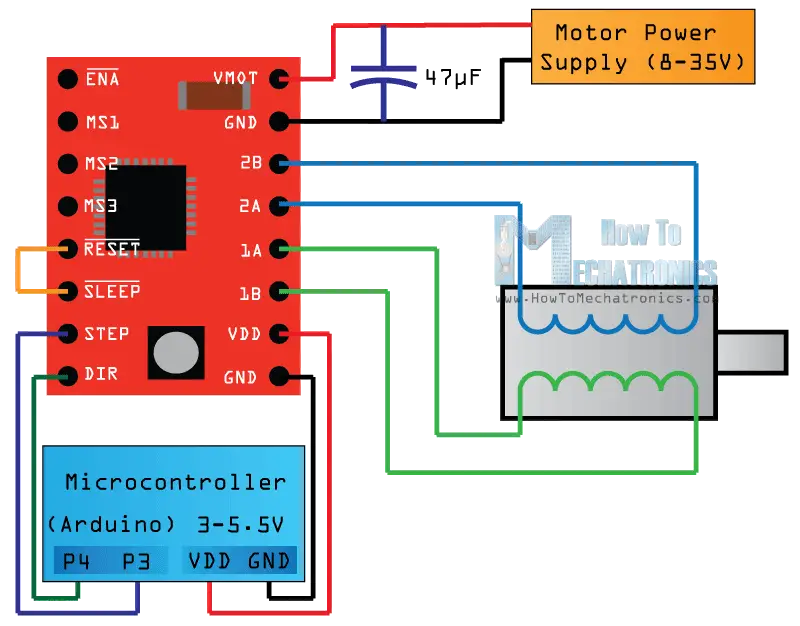
Sleep and reset like this:
Anyways, abandoned hooking it up to the extruder and am just using it with the third Z motor. Sings a little more, but seems to be working now?
Of course, that is after trial and error (mostly error!) to get the auto bed levelling working. I was using auto levelling with two motors previously and had two optical endstops to get the first Z home to make sure the sides were roughly level (thanks poor choice in lead screws). This involved splitting the axis into U. I mistakenly went down that path with the third motor and and split to V and created a homev.g.
I didn't find it anywhere, but it seems the home all button from the web interface calls homeu.g and homev.g after the homeall.g. Took me quite a while to figure this out, but after stripping my config of u and v and deleting the homeu.g and homev.g, things seem to be working.
I would love to know why it didn't play nice with the one extruder motor, but I really can't figure out what was different.
I haven't updated firmware in a long time. Still on an early 2 and need to jump to three.
Oh, and thanks for the link to the boards. I like how the banggood one takes power for the motor.