@fcwilt
yes, i have 3 height maps created for each material i use, at different temperatures, and i update them almost every day
Best posts made by RODOKAS
-
RE: problem with irregular bltouch meshposted in General Discussion
Latest posts made by RODOKAS
-
RE: Questions about the input shaping pluginposted in Plugins for DWC and DSF
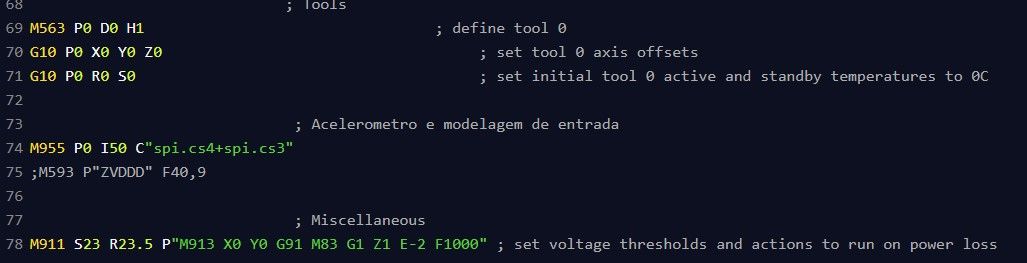
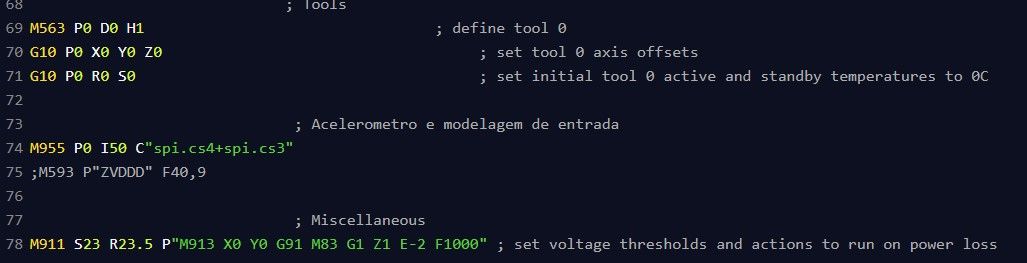
@rodokas Hi friend, thanks for trying to help. where you mentioned that you have ; I was in tests, and I'm using the plugin, that screenshot was just to show how it's placed because the accelerometer code.
I'm doing everything inside the plugin, so at this point I don't need to worry about the 593 in the config.
all tests inside the plugin also go wrong. -
RE: Questions about the input shaping pluginposted in Plugins for DWC and DSF
Friends,
I have the accelerometer installed and I speak the readings successfully using the imput shaping plugin 3.4.0 b1.
after reading without input modeling, I apply some modeling to analyze the result, and they don't look good, I don't know if I'm doing something wrong or my mechanics are not good enough.
I'll put images in the correct order, from the data collections made by the plugin.
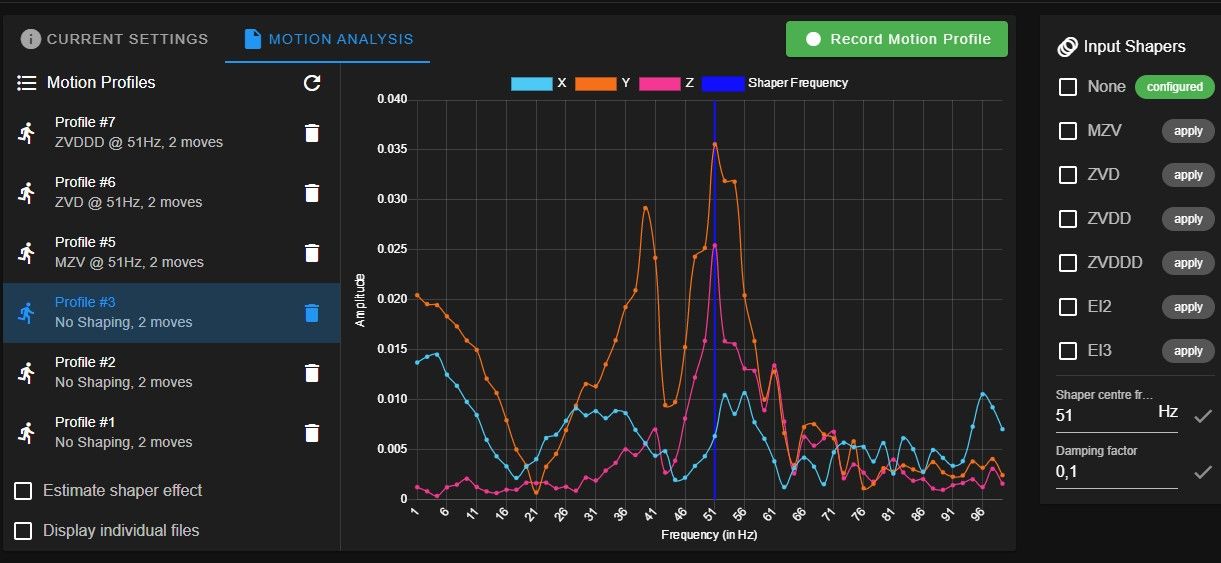
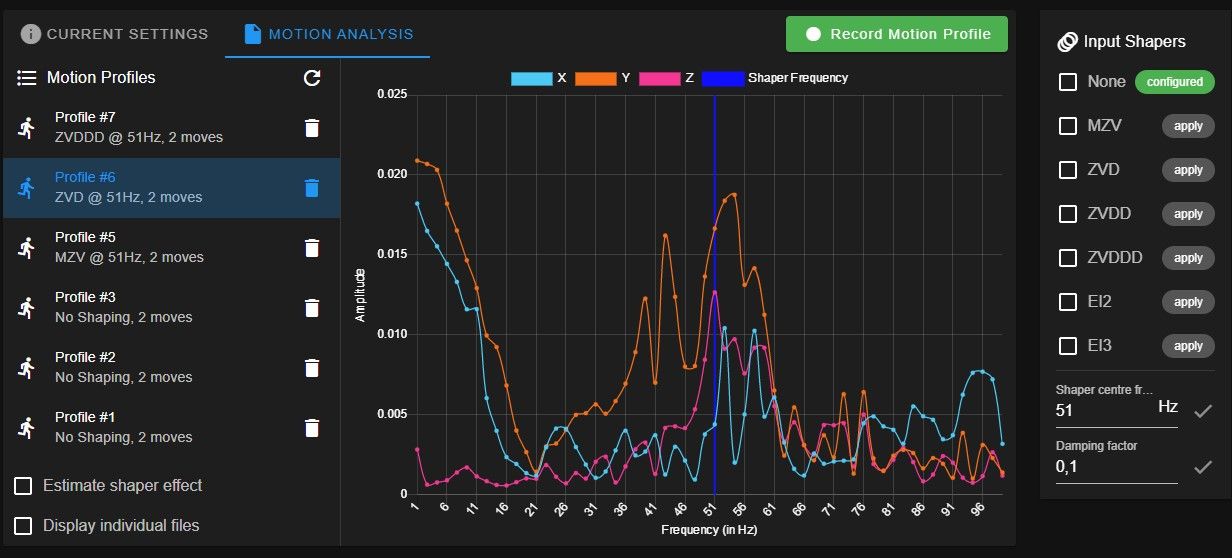
the interesting thing is that the plugin simulates the expected result with the input modeling, in these simulations the results seem very good, but when I collect data using the input modeling the actual results collected are not as good as the simulations.No shaper
simulating zvd
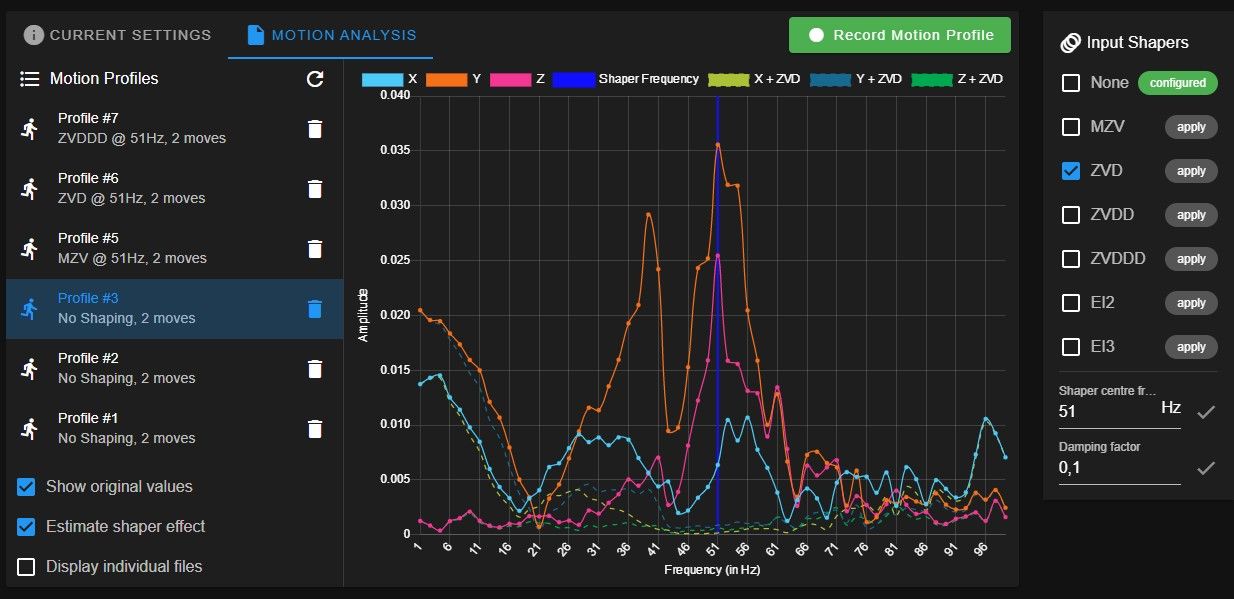
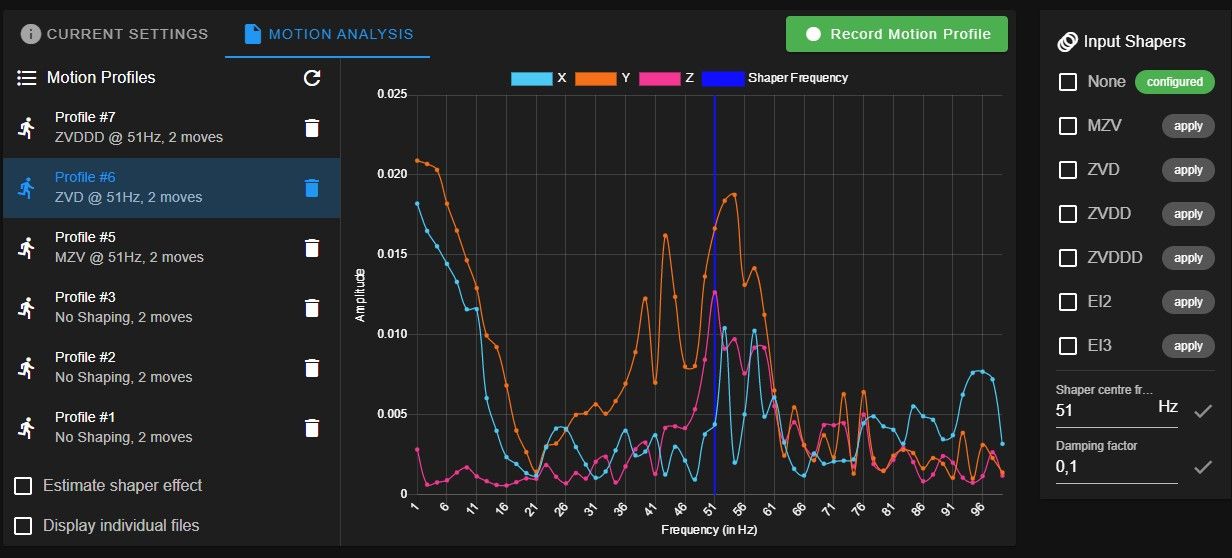
ZVD
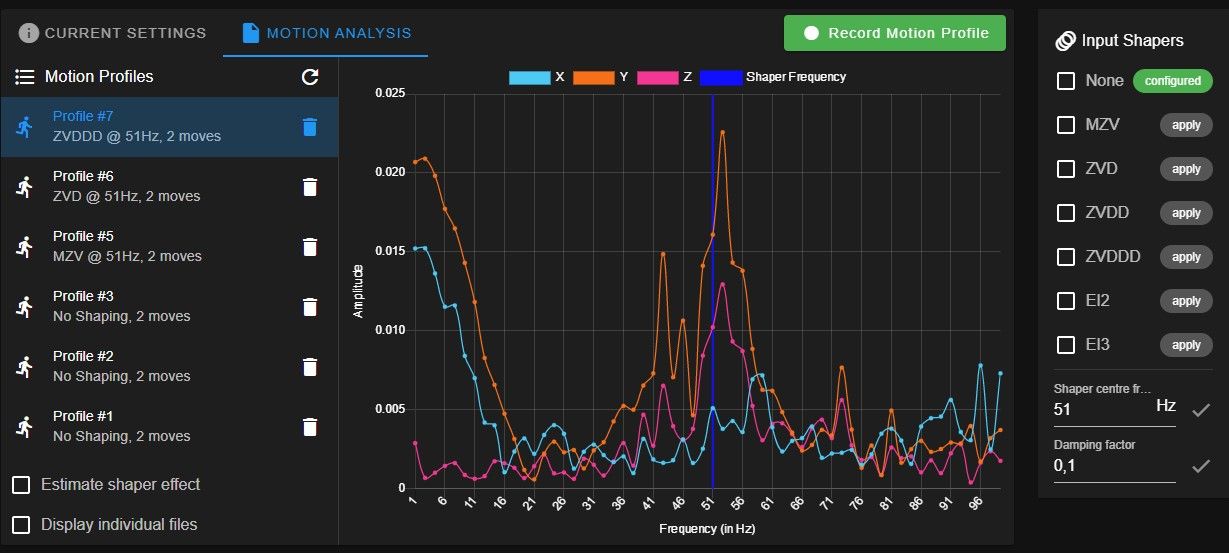
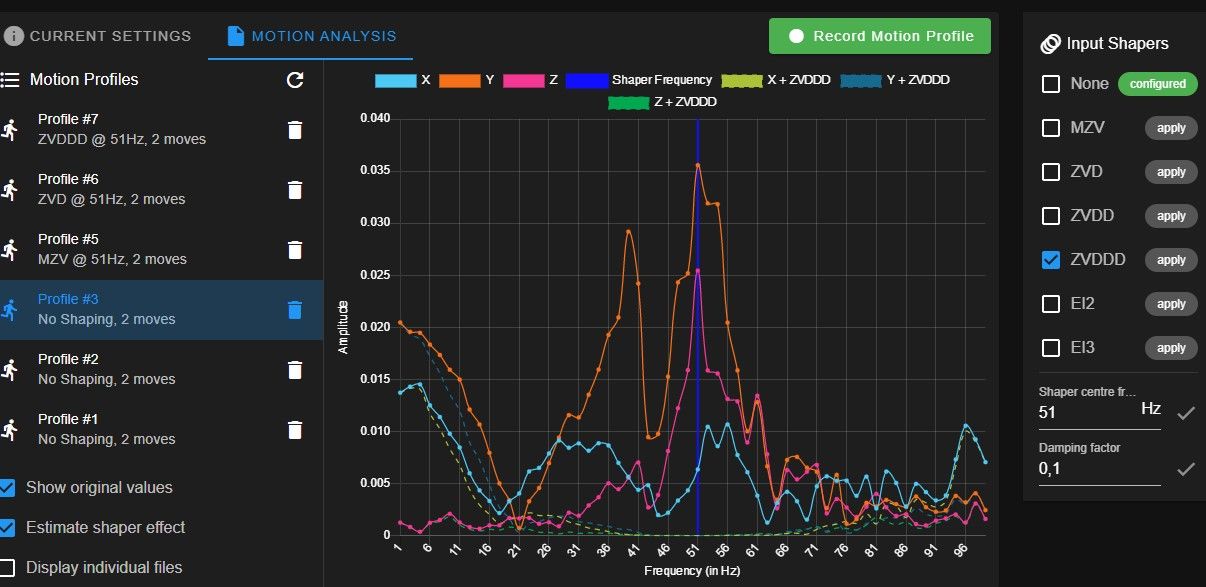
simulating zvddd
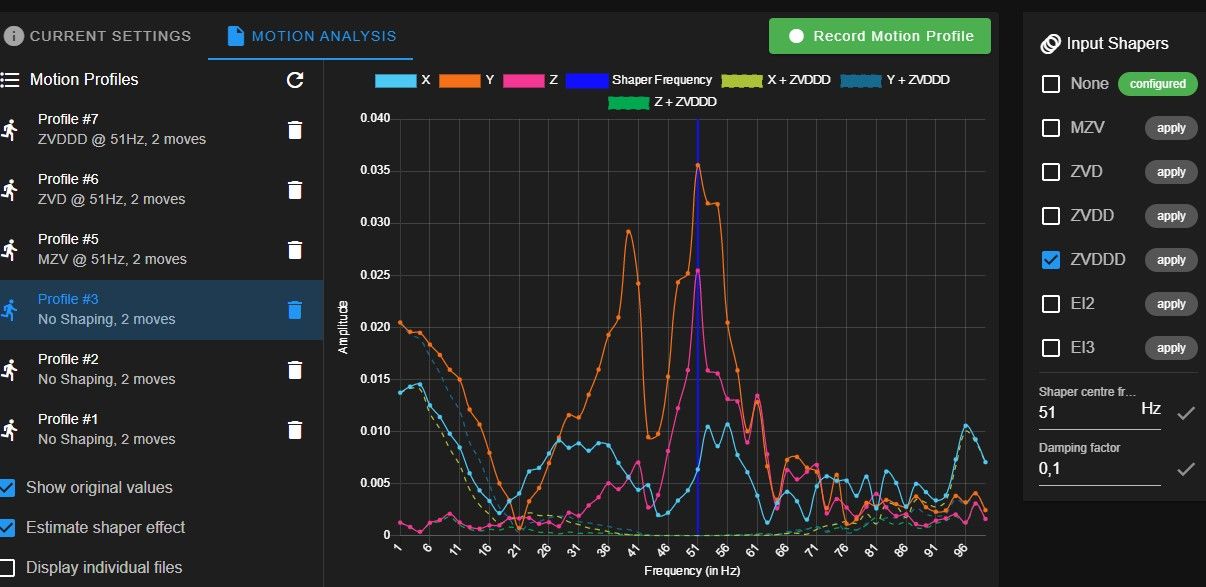
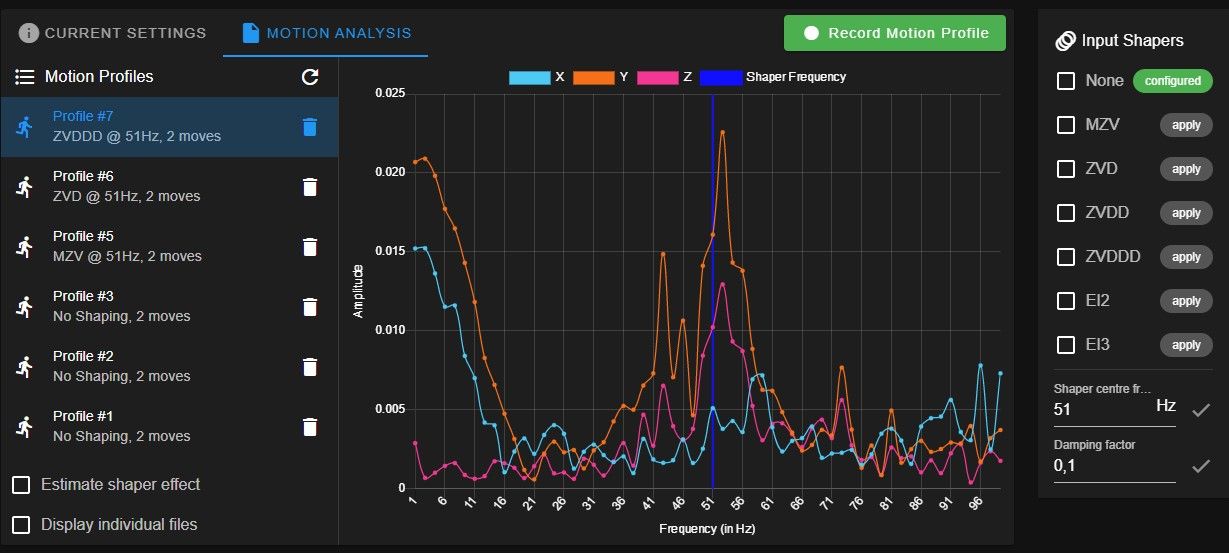
ZVDDD

=== Diagnostics === RepRapFirmware for Duet 2 WiFi/Ethernet version 3.4.1rc1 (2022-05-03 09:34:00) running on Duet WiFi 1.02 or later Board ID: 0JD0M-9P6M2-NW4SS-6JKF6-3SJ6N-TBWVK Used output buffers: 1 of 26 (14 max) === RTOS === Static ram: 23868 Dynamic ram: 77364 of which 12 recycled Never used RAM 9924, free system stack 124 words Tasks: NETWORK(ready,13.6%,230) ACCEL(notifyWait,0.2%,232) HEAT(notifyWait,0.0%,316) Move(notifyWait,0.0%,283) MAIN(running,86.0%,448) IDLE(ready,0.2%,30), total 100.0% Owned mutexes: WiFi(NETWORK) HTTP(MAIN) === Platform === Last reset 00:09:15 ago, cause: power up Last software reset at 2022-05-20 11:14, reason: User, GCodes spinning, available RAM 12776, slot 2 Software reset code 0x0003 HFSR 0x00000000 CFSR 0x00000000 ICSR 0x0041f000 BFAR 0xe000ed38 SP 0x00000000 Task MAIN Freestk 0 n/a Error status: 0x10 Aux0 errors 0,0,0 Step timer max interval 0 MCU temperature: min 20.1, current 30.2, max 30.4 Supply voltage: min 24.5, current 24.6, max 24.8, under voltage events: 0, over voltage events: 0, power good: yes Heap OK, handles allocated/used 0/0, heap memory allocated/used/recyclable 0/0/0, gc cycles 0 Events: 0 queued, 0 completed Driver 0: standstill, SG min 0 Driver 1: standstill, SG min 0 Driver 2: standstill, SG min 0 Driver 3: standstill, SG min 0 Driver 4: standstill, SG min n/a Driver 5: Driver 6: Driver 7: Driver 8: Driver 9: Driver 10: Driver 11: Date/time: 2022-05-23 09:41:24 Cache data hit count 4294967295 Slowest loop: 56.88ms; fastest: 0.19ms I2C nak errors 0, send timeouts 0, receive timeouts 0, finishTimeouts 0, resets 0 === Storage === Free file entries: 9 SD card 0 detected, interface speed: 20.0MBytes/sec SD card longest read time 1.1ms, write time 248.2ms, max retries 0 === Move === DMs created 83, segments created 38, maxWait 448960ms, bed compensation in use: none, comp offset 0.000 === MainDDARing === Scheduled moves 20, completed 20, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 4], CDDA state -1 === AuxDDARing === Scheduled moves 0, completed 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1 === Heat === Bed heaters 0 -1 -1 -1, chamber heaters -1 -1 -1 -1, ordering errs 0 Heater 1 is on, I-accum = 0.0 === GCodes === Segments left: 0 Movement lock held by null HTTP is ready with "M122" in state(s) 0 0, running macro Telnet is idle in state(s) 0 File is idle in state(s) 0 USB is idle in state(s) 0 Aux is idle in state(s) 0 Trigger is idle in state(s) 0 Queue is idle in state(s) 0 LCD is idle in state(s) 0 Daemon is idle in state(s) 0 Autopause is idle in state(s) 0 Code queue is empty === Filament sensors === Extruder 0 sensor: ok === Network === Slowest loop: 115.06ms; fastest: 0.00ms Responder states: HTTP(0) HTTP(0) HTTP(0) HTTP(0) FTP(0) Telnet(0), 0 sessions HTTP sessions: 1 of 8 - WiFi - Network state is active WiFi module is connected to access point Failed messages: pending 0, notready 0, noresp 0 WiFi firmware version 1.26 WiFi MAC address 24:a1:60:2f:8d:12 WiFi Vcc 3.40, reset reason Turned on by main processor WiFi flash size 4194304, free heap 26616 WiFi IP address 192.168.1.109 WiFi signal strength -47dBm, mode 802.11n, reconnections 0, sleep mode modem Clock register 00002002 Socket states: 0 0 0 0 0 0 0 0After doing all the data collection, and inserting it in my config and I did a test print, I didn't see any difference, so something is really wrong
please help me understand if i'm doing something wrong or there might be something wrong with my firmware.
I'm using jerk of 300mm/min and accelerations of 3500mm/s2the accelerometer is fixed this way

Thank you for your help!
-
RE: problems with input modeling using pluginposted in General Discussion
@mikeabuilder we are learning together, that's what the forum is for. let's wait for people with more experience to help us. I look forward to getting good results.
-
RE: problems with input modeling using pluginposted in General Discussion
@rodokas the accelerometer is fixed this way

-
problems with input modeling using pluginposted in General Discussion
Friends, I need help using input modeling in duet 2 wifi 3.4.1
I have the accelerometer installed and I speak the readings successfully using the imput shaping plugin 3.4.0 b1.
after reading without input modeling, I apply some modeling to analyze the result, and they don't look good, I don't know if I'm doing something wrong or my mechanics are not good enough.
I'll put images in the correct order, from the data collections made by the plugin.
the interesting thing is that the plugin simulates the expected result with the input modeling, in these simulations the results seem very good, but when I collect data using the input modeling the actual results collected are not as good as the simulations.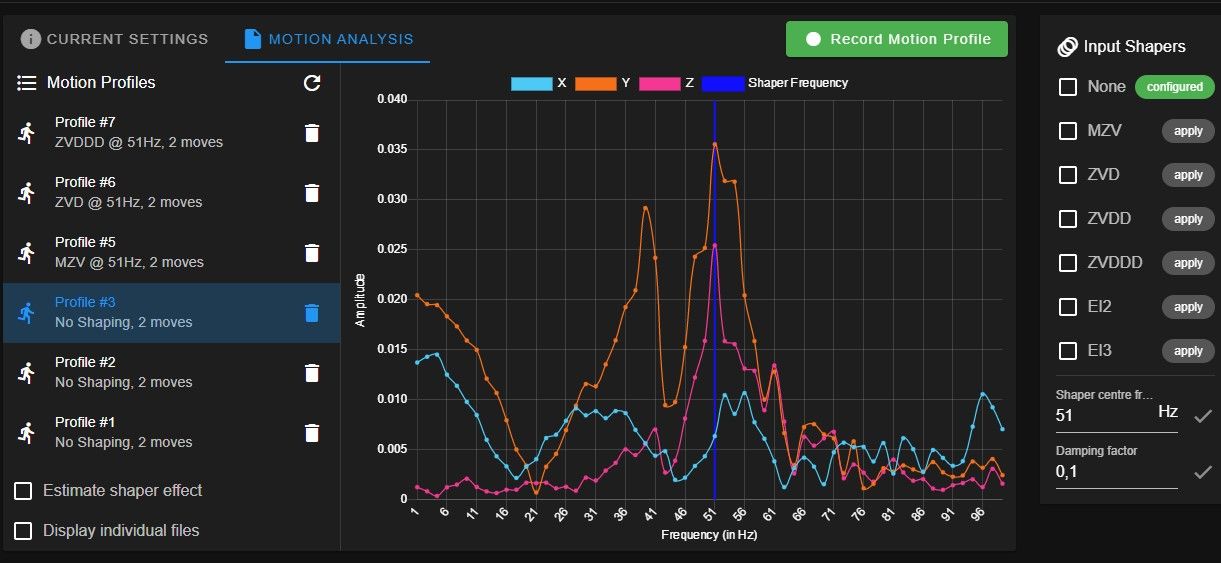 ![no shaper.jpg]
![no shaper.jpg]
simulating zvd
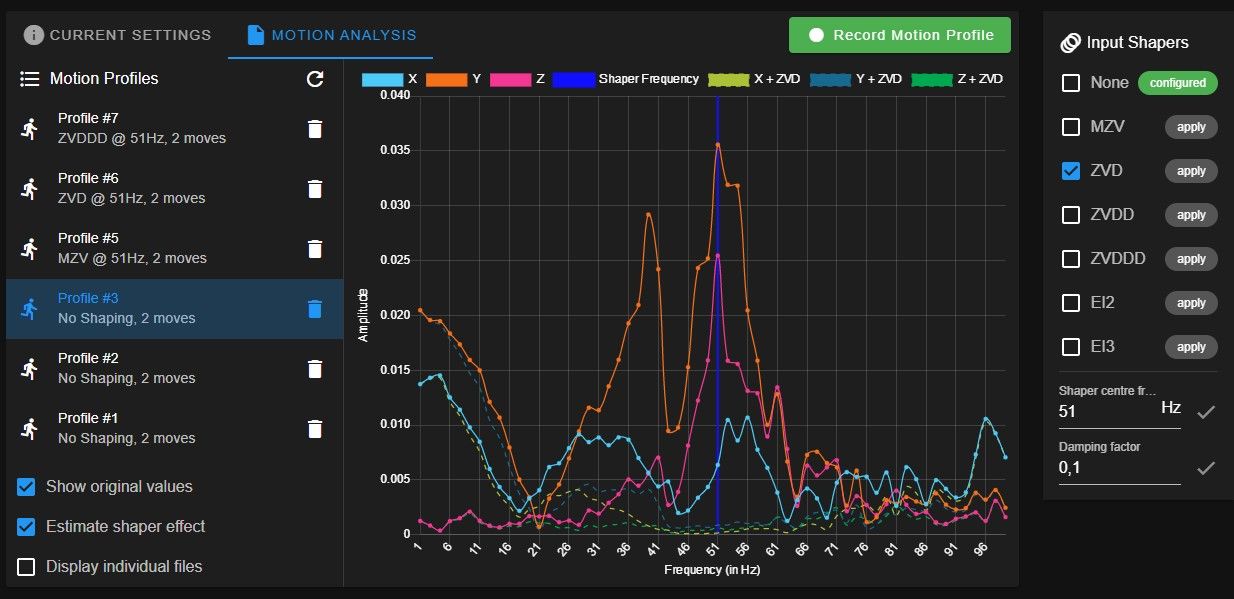
ZVD
simulating zvddd
ZVDDD

M122
=== Diagnostics === RepRapFirmware for Duet 2 WiFi/Ethernet version 3.4.1rc1 (2022-05-03 09:34:00) running on Duet WiFi 1.02 or later Board ID: 0JD0M-9P6M2-NW4SS-6JKF6-3SJ6N-TBWVK Used output buffers: 1 of 26 (14 max) === RTOS === Static ram: 23868 Dynamic ram: 77364 of which 12 recycled Never used RAM 9924, free system stack 124 words Tasks: NETWORK(ready,13.6%,230) ACCEL(notifyWait,0.2%,232) HEAT(notifyWait,0.0%,316) Move(notifyWait,0.0%,283) MAIN(running,86.0%,448) IDLE(ready,0.2%,30), total 100.0% Owned mutexes: WiFi(NETWORK) HTTP(MAIN) === Platform === Last reset 00:09:15 ago, cause: power up Last software reset at 2022-05-20 11:14, reason: User, GCodes spinning, available RAM 12776, slot 2 Software reset code 0x0003 HFSR 0x00000000 CFSR 0x00000000 ICSR 0x0041f000 BFAR 0xe000ed38 SP 0x00000000 Task MAIN Freestk 0 n/a Error status: 0x10 Aux0 errors 0,0,0 Step timer max interval 0 MCU temperature: min 20.1, current 30.2, max 30.4 Supply voltage: min 24.5, current 24.6, max 24.8, under voltage events: 0, over voltage events: 0, power good: yes Heap OK, handles allocated/used 0/0, heap memory allocated/used/recyclable 0/0/0, gc cycles 0 Events: 0 queued, 0 completed Driver 0: standstill, SG min 0 Driver 1: standstill, SG min 0 Driver 2: standstill, SG min 0 Driver 3: standstill, SG min 0 Driver 4: standstill, SG min n/a Driver 5: Driver 6: Driver 7: Driver 8: Driver 9: Driver 10: Driver 11: Date/time: 2022-05-23 09:41:24 Cache data hit count 4294967295 Slowest loop: 56.88ms; fastest: 0.19ms I2C nak errors 0, send timeouts 0, receive timeouts 0, finishTimeouts 0, resets 0 === Storage === Free file entries: 9 SD card 0 detected, interface speed: 20.0MBytes/sec SD card longest read time 1.1ms, write time 248.2ms, max retries 0 === Move === DMs created 83, segments created 38, maxWait 448960ms, bed compensation in use: none, comp offset 0.000 === MainDDARing === Scheduled moves 20, completed 20, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 4], CDDA state -1 === AuxDDARing === Scheduled moves 0, completed 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1 === Heat === Bed heaters 0 -1 -1 -1, chamber heaters -1 -1 -1 -1, ordering errs 0 Heater 1 is on, I-accum = 0.0 === GCodes === Segments left: 0 Movement lock held by null HTTP is ready with "M122" in state(s) 0 0, running macro Telnet is idle in state(s) 0 File is idle in state(s) 0 USB is idle in state(s) 0 Aux is idle in state(s) 0 Trigger is idle in state(s) 0 Queue is idle in state(s) 0 LCD is idle in state(s) 0 Daemon is idle in state(s) 0 Autopause is idle in state(s) 0 Code queue is empty === Filament sensors === Extruder 0 sensor: ok === Network === Slowest loop: 115.06ms; fastest: 0.00ms Responder states: HTTP(0) HTTP(0) HTTP(0) HTTP(0) FTP(0) Telnet(0), 0 sessions HTTP sessions: 1 of 8 - WiFi - Network state is active WiFi module is connected to access point Failed messages: pending 0, notready 0, noresp 0 WiFi firmware version 1.26 WiFi MAC address 24:a1:60:2f:8d:12 WiFi Vcc 3.40, reset reason Turned on by main processor WiFi flash size 4194304, free heap 26616 WiFi IP address 192.168.1.109 WiFi signal strength -47dBm, mode 802.11n, reconnections 0, sleep mode modem Clock register 00002002 Socket states: 0 0 0 0 0 0 0 0After doing all the data collection, and inserting it in my config and I did a test print, I didn't see any difference, so something is really wrong
please help me understand if i'm doing something wrong or there might be something wrong with my firmware.
I'm using jerk of 300mm/min and accelerations of 3500mm/s2 -
RE: problem with irregular bltouch meshposted in General Discussion
@fcwilt thanks for the example. but in my case the touch does not understand the bed slightly higher at x +, it is as if on the right side of the table the z offset was different from the left side of the table. I need to identify where there may be a difference for this to happen, when I find it I will put it here. thank you
-
RE: problem with irregular bltouch meshposted in General Discussion
@Phaedrux
you were right, after the home all and the two engines are aligned with the table, I decided to make a g30 on each side (x5 and x295) and try to lower the nozzle to the table to see if there is a difference.
the result: at x5 and in the center of the table, the g30 corresponds exactly, so after the g30, I put the nozzle at 0.1 and it really has 0.1. But in position x295 after g30, I should have the same result, but immediately after g30, when I send the nozzle go up to 0 it touches the table, and I found that it only moves away from the table when it is at 0.2, so I have that difference.
There is no software error, there is no mesh error. all measurements were made at 150 y.
as much as I insist on the g30 in position x295 and y150 I have the same result, it is as if the bltouch measured wrong only in that position, the whole mechanics seems to be correct, but I do not understand what may be happening.


