Hello,
I'm trying to add additional U axis to my 3d printer using E2 on expansion board. As external drive I used A4988 stepper driver.
I got everything wired up, I created U axis which seems to work but whenever I try to move motor it wont and instead makes high pitch hissing noise. When I touch shaft there is a bit torque but very little. I tried different A4988 drivers as well as different kind (which I cannot identify) with same result. Motor is also fine as I tested It on E0 driver, I also used M564 S0 H0 command to disable endstops.
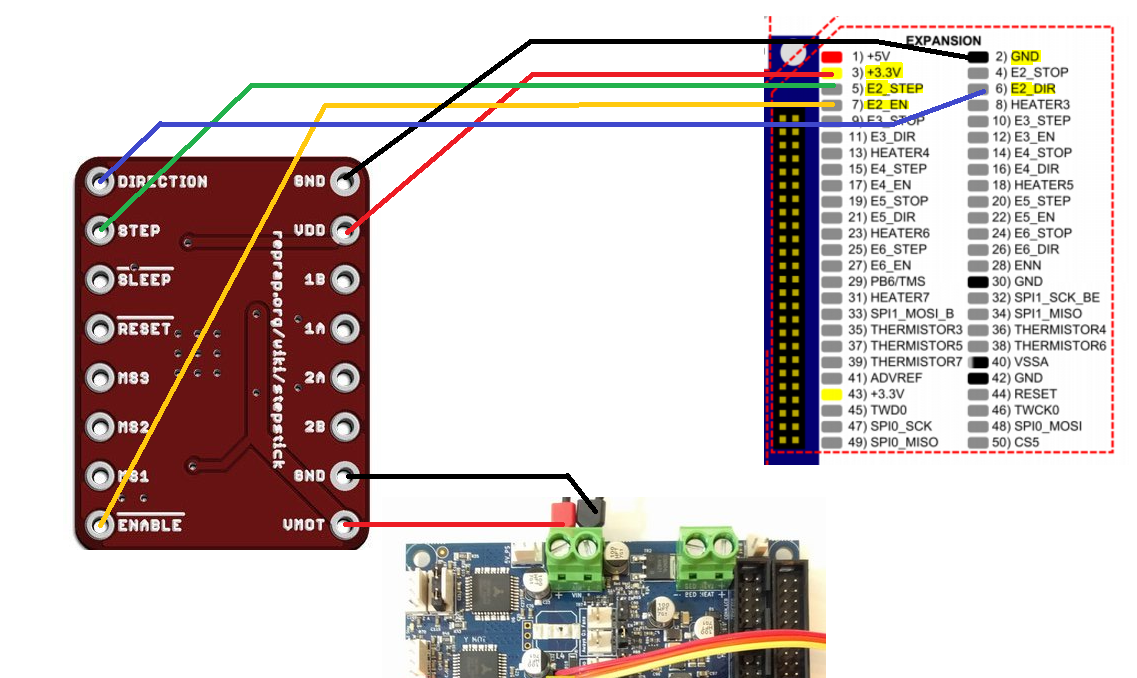
Here is my wiring, maybe there is something that I missed (except for stepper motor ") )
)
Please free to criticize my code as I'm not sure if my stepping is correct. It works for me so far.
edit
I lowered number of steps on U axis and now motor behave differently. It still doesn't work but motor makes small movement back and forth like when you wire it incorrectly.
I'm pretty sure I have coils wired correctly but I tried different combinations just in case.
I ordered new genuine Pololu a4988 driver and breakout board for it, I hope it will help.
; Drives
M569 P0 S0 ; physical drive 0 goes backward
M569 P1 S0 ; physical drive 1 goes forwards
M569 P2 S1 ; physical drive 2 goes forwards
M569 P3 S0 ; physical drive 3 goes forwards
M569 P4 S0 ; physical drive 4 goes forwards
M569 P5 S0 ; physical drive 5 goes forwards
M584 X0 Y1 Z2 U5 E3:4 ; set drive mapping
M350 X16 Y16 Z16 U16 E16:16 I1 ; configure microstepping with interpolation
M92 X145.25 Y145.25 Z717.5 U5 E425:425 ; set steps per mm
M566 X1500.00 Y1500.00 Z12.00 U120 E120.00:120.00 ; set maximum instantaneous speed changes (mm/min)
M203 X6000.00 Y6000.00 Z1500 U60 E1200.00:1200.00 ; set maximum speeds (mm/min)
M201 X1000.00 Y1000.00 Z200.00 U60 E250.00:250.00 ; set accelerations (mm/s^2)
M906 X1500 Y1500 Z1500 U1200 E1200:1200 I20 ; set motor currents (mA) and motor idle factor in per cent
M84 S30 ; Set idle timeout
; Axis Limits
M208 X0 Y0 Z0 U0 S1 ; set axis minima
M208 X320 Y320 Z330.3 U50 S0 ; set axis maxima
; Endstops
M574 X1 Y1 Z2 U1 S0 ; set active high endstops