optically isolated input
ok. i can do that.
I have installed new sd card and copy / pasted all backup data and it look that everything is OK.
optically isolated input
ok. i can do that.
I have installed new sd card and copy / pasted all backup data and it look that everything is OK.
As from yesterday, i get this error:
"page not found Check that the SD card is mounted and has the correct files in its /www folder"
I try to unplug 24V main power supply, unplug USB, reconnect everything and it worked for a while.
Then I run homing and got this error :
G28
Error: Cannot read file, error code 1
after that i lost my files in G-codes directory....
It appears that i have to replace the SD card and reinstall firmware to solve this problem ?.
The only thing i am concern of is this.
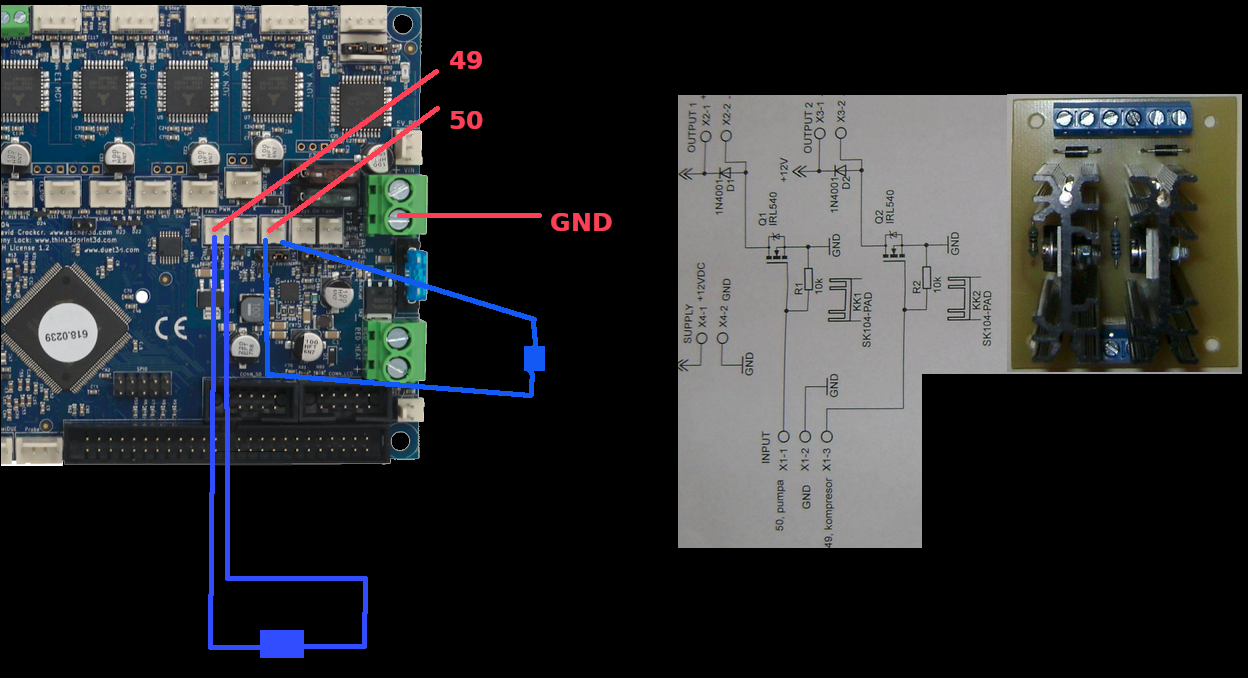
Would it be possible that the SD card got damaged because of the setup that i use for triggering vacuum pump.. To be more exact. i have hooked up my external circuit that is triggering 24V ( external 24V adapter not connected to duet ) to my vacuum injector and replaced one jummper under FAN.
To manage this to work HW setup is made on the way like i showed in picture. Could this anyhow effect to duet board ? I dont think that this has anything to do with it but who knows...
Gcode setup:
G4 P150
M106 S255
;-------------------------
G4 P150
M106 S0
A.
Hi.
I still have "sending USB data" problems with my vision system to duet setup, but i guess i will manage to solve it somehow. My question would be:
How can i "draw" simple circle with my rotary delta robot ?
It's just for demonstration purposes and the sequence should be something like:
Vision program is based on python so maybe i can implement this circle part into the code, somehow ?
Or call it as external file ? Anyhow, how to draw a circle....
A.
I forget to write that i have try different baudrate settings and i also try to remove it but nothing changes.
BTW. it looks like attached file did not pass so am sending again (rename txt to py ).
serialutil.TXT
Hi to all.
I have one strange problem that and i can not find error / bug in my code.
I write one external program that used to access to duet. Nothing much,
the program is sending data from vision system to duet.
Now, this has worked before without any problems but now i just can not send any data.
Meanwhile, I did make firmware update but this should have (or has) no affect to this situation.
Computer and OS is still the same as before and DUET is recognized as OpenMoko at ttyACM0.
Am using Linux distro Ubuntu 16 / 64 bit. I will attach file that am using for comm settings but if someone has some simpler test code i can use, please share...
This is the part that i use for comm and "serial" file is in attach....
try:
#ser = serial.Serial("/dev/ttyAMC0", baudrate=115200, timeout=3.0)
ser = serial.Serial("/dev/ttyAMC0", baudrate=115200)
for object in self.current_objects:
x, y = object
strCode = 'G1 X' + str(x) + ' Y' + str(y) + ' Z5' + ' F1000'
ser.write(str.encode(strCode + '\n'))
# settings for vacuum pump
if bRecycleBin:
if x < 0:
strCode = 'G1 X-200' + 'G1 Y0' + ' Z5' + ' F4000'
ser.write(str.encode(strCode + '\n'))
else:
strCode = 'G1 X200' + 'G1 Y0' + ' Z5' + ' F4000'
ser.write(str.encode(strCode + '\n'))
# settings for vacuum pump
ser.flush()
except:
print("Fail to connect...")
Thank you for your reply David. I will check all this in day or two.
At the moment am adding new metal carriers for end switches so we will see if this may solve problem.
They will be in mm with floor / construction / arms.
A.
OK. This is working as i need to..
I will test this with external program but as far as i can remeber i did not put extra G90 commands into code...
Anyhow, thank you !
Btw. If you have time/wish please look at my other post regarding nozzle positioning:
https://forum.duet3d.com/topic/12566/nozzle-positoning-problems
Working solution for test up / down movement:
G28
G1 X100 Y60 F15000
;---------------------------
G91
G1 Z-25 F6000
;--------------------------
G4 P150
M106 S255
G4 P150
M106 S0
;-------------------------
G91
G1 Z25 F6000
;--------------------------
G90
G1 X0 Y0 F15000
Are those commands with Z25 and Z-25 supposed to be relative moves? The values suggest they are.
*** I understand that this last command is not executed because i entered 91, which triggers relative movement so X and Y is will be processed on the same way but i dont know how to make this otherwise.
So, what would you suggest to make simple pickup routine like:
When i was using stepper motors this pickup part was working OK..
A.
The gcode in the first part is telling the nozzle to move to Z-15 as an absolute position, ie 15mm below the bed, which it can't do!
*** Hmmm, maybe we didnt understand us correctly. Nozzle working hight is cca 8 cm above conveyor track and if i enter Z-15 top of the nozzle should be lowered few mm above track. If i enter Z15, arm are lifted up.....
This is working
G28
G1 X100 Y30 F15000
;---------------------------
G1 Z-25 P60 F15000
;--------------------------
G4 P150
M106 S255
G4 P150
M106 S0
;-------------------------
G1 Z25 F15000
;--------------------------
G1 X0 Y0 F15000
but last command is not executed ( arms are not moved to X0 Y0 ).
David has suggested / explained this, but it looks like i can not implemented it.
Not sure why you need the M120 (push) and M121 (pop) commands.
*** i dont need them at all but without them last command is not executed.
A.
Hi.
For some unknown reason, i can not move nozzle head up or down, when i run it as script or over some external SW. Funny part is that i can move it normally when i press on Z icons ( head movement part )
This does not work :
G28
G1 X100 Y30 F15000
;---------------------------
G1 Z-15 P60 F6000
G4 P150
G1 Z15 P60 F6000
;--------------------------
G1 X0 Y0 F15000
////////////////////////////////////////////////////////////////
but this works OK:
G28
G1 X100 Y30 F15000
;---------------------------
M120
G91
G1 Z-15 F6000
M121
G4 P150
M120
G91
G1 Z15 F6000
M121
;---------------------------
G1 X0 Y0 F15000
?
I know that second option is not right approach i just write it for test purposes.
A.