Ok at this point with the information in the thread - its working now. I just used the values from the referenced config but I spot checked it on my bot - within 1mm so I just stuck with that
I consider this resolved ") thanks @fcwilt !
thanks @fcwilt !
Ok at this point with the information in the thread - its working now. I just used the values from the referenced config but I spot checked it on my bot - within 1mm so I just stuck with that
I consider this resolved thanks @fcwilt !
@fcwilt said in Help with M671:
Well I don't know that printer but the numbers in M671 are in reference to X=0 Y=0.
I think this is the bit I was not understanding - all are referenced from x0,y0
The config referenced earlier by @PaulHew makes more sense now ( and the numbers are not too far from what I had actually )
@fcwilt so yea I'm trying to get my bed leveled. This is on a voron 2.4 - I have 4 independent pivot points ( belts, not leadscrew )
M671 is configuring the plane. The problem is I don't get how to derive the numbers for that command.
I'm working on a new printer build. I'm at the point where the bot prints but the M671 settings are wrong. Getting the correct values is where I'm stuck - the doc just does not make sense to me ( how to take values and populate the config )
With my current M671:
M671 X-67:-67:385:385 Y67:368:368:9 S20
Its not clear to me how I need to come up with the measurements and then populate into the gcode command.
I diagrammed the layout on my whiteboard. The measurements are taken from the corner of the bed to the center of the pivot ( eg at all 4 corners ) The blue dots represent the pivot point.

I came up with
M671 X-67:-67:385:385 Y67:385:385:10 S20
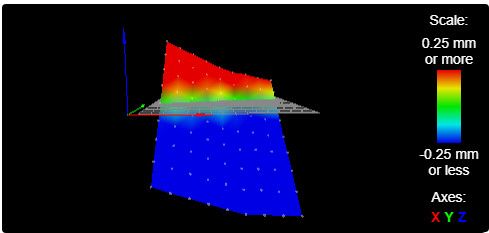
Does this look right? ( If so I'm doing something wrong because its always lower in the back after running z home )
Thoughts? What am I doing wrong here?
@jay_s_uk Awesome thanks so much!
@jay_s_uk ah got it ok!
So I would just want to use my caliper or whatever to measure from each corner to that center point of the screw right? Is it a straight angle or squared?
Or is it from 0,0 the distance between?
@jay_s_uk Not sure what you mean by pivot point. Is this like mid point between the belts and the pulley or something?
This is related to a thread I started on https://forum.duet3d.com/topic/28055/4-independent-z-axis-tilt?_=1649773992041
I've seen in various configurations for my printer ( voron 2.4 but that does not really matter here ) different values for my printer:
M671 X-60:-10:360:370 Y0:395:395:0 S20 ; Define Z belts locations (Front_Left, Back_Left, Back_Right, Front_Right)
; Position of the bed leadscrews.. 4 Coordinates
What I want to know is HOW do I come up with those points? What are the measurements referenced against? ( the doc does not help me - maybe I'm just too dense! )
do I reference the values for the stepper positions by reference from 0,0 front left of the frame?
For what its worth the homing, after I tweaked the order and values from a config, got a LOT closer
@fcwilt Ok confirmed yea this is exactly what I needed thanks!
@fcwilt said in 4 independent z axis tilt:
M671
Ok yea I think I'm getting this now thanks! I also found https://www.mrappz.com/voron-electronics-setup-i/ - going to let this churn a bit and see where it goes thanks!
Bill
I'm trying to understand how to configure for my voron 2.4. This is using duet3 vs klipper
So I'm having an odd issue. Its easiest to explain via https://youtu.be/-1k2hf2g6po. The config is sorta stolen / tweaked. The last bit really is this
The gist of the video is that the 4 corners are not equal distance from the frame extrusion its all crooked ;(
When following https://duet3d.dozuki.com/Wiki/Bed_levelling_using_multiple_independent_Z_motors#Section_Example_for_3_motors its not clear to me how to draw the visual in my head for what each of the coordinates means. Where, if anywhere, does order come into play?
For example in my configuration:
; Drives for Z - verified locations
M569 P0.2 S1 ; Front left
M569 P0.1 S0 ; Back left
M569 P0.0 S1 ; Back right
M569 P0.3 S1 ; Front right
(...)
M584 X0.4 Y0.5 Z0.0:0.1:0.2:0.3 E1.0 ; set drive mapping
(...)
M671 X354:354:-53:-53 Y0:370:370:0 S20 ; Define Z belts locations (Front_Left, Back_Left, Back_Right, Front_Right)
I don't understand what those numbers mean and how I need to make the measurements / fill it in. Am I just measuring the distance from the belt center to the corner or something? I'm just not following what the doc is trying to tell me to do!
yea confirmed the tool board just loaded up
Ok, noted new flow! Sorry for the wild excursion there!
Ok, issue solved wow!
So I probably missed it but getting the Duet2and3Firmware-3.3.zip and uploading it via the web interface put the firmware files in place. Once I followed the other forum article and got that hooked up - its working just fine! ( well, 3hc is still need to hit the 1lc )
@alex-cr When I was using it on the bench I was drawing from usb + I added a 12v to the 6hc and other boards ( could pull many amps if I needed but never did )
I see on the 3hc or 1lc board a single blink followed shortly by 4 which I believe means its not happy about something
I found https://forum.duet3d.com/topic/17928/duet-3-expansion-3hc-v1-0-no-can-connection/3 which seems to show the same symptoms so going to read over that thread
Hello,
I've been working on my build for a bit. I have the 6hc control board + a 1lc and 3hc connecting via can bus.
Initially over usb on the bench I was getting general connectivity from the tool board, could read voltage and run a stepper. I was having some issues and shelved that for a bit - wanted to get everything mounted, cables run etc.
I am now no longer seeing anything on the can bus. With only the 1lc ( and resistor in place on wire ) and the 6hc - no connectivity. Ditto with the 3hc ( only ) connected and with the jumpers on.
Full output from M122.
M122
=== Diagnostics ===
RepRapFirmware for Duet 3 MB6HC version 3.3 (2021-06-15 21:45:47) running on Duet 3 MB6HC v1.01 or later (SBC mode)
Board ID: 08DJM-9P63L-DJ3S0-7JTDA-3SS6N-KBLRB
Used output buffers: 1 of 40 (11 max)
=== RTOS ===
Static ram: 150904
Dynamic ram: 62964 of which 24 recycled
Never used RAM 140300, free system stack 200 words
Tasks: SENSORS(delaying,0.0%,102) SBC(resourceWait:,5.4%,346) HEAT(delaying,0.0%,325) Move(notifyWait,0.0%,302) CanReceiv(notifyWait,0.0%,740) CanSender(notifyWait,0.0%,374) CanClock(delaying,0.0%,339) TMC(notifyWait,7.1%,93) MAIN(running,85.6%,967) IDLE(ready,1.8%,29), total 100.0%
Owned mutexes: HTTP(MAIN)
=== Platform ===
Last reset 00:11:06 ago, cause: reset button
Last software reset at 2022-02-06 12:04, reason: User, none spinning, available RAM 140560, slot 2
Software reset code 0x0012 HFSR 0x00000000 CFSR 0x00000000 ICSR 0x00400000 BFAR 0x00000000 SP 0x00000000 Task SBC Freestk 0 n/a
Error status: 0x00
Aux0 errors 0,0,0
Step timer max interval 681
MCU temperature: min 37.5, current 39.0, max 48.0
Supply voltage: min 0.3, current 24.0, max 24.0, under voltage events: 0, over voltage events: 0, power good: yes
12V rail voltage: min 0.1, current 12.1, max 12.1, under voltage events: 0
Heap OK, handles allocated/used 0/0, heap memory allocated/used/recyclable 0/0/0, gc cycles 0
Driver 0: position 0, standstill, reads 41610, writes 11 timeouts 0, SG min/max 0/0
Driver 1: position 0, standstill, reads 41610, writes 11 timeouts 0, SG min/max 0/0
Driver 2: position 0, standstill, reads 41610, writes 11 timeouts 0, SG min/max 0/0
Driver 3: position 0, standstill, reads 41610, writes 11 timeouts 0, SG min/max 0/0
Driver 4: position 0, standstill, reads 41611, writes 11 timeouts 0, SG min/max 0/0
Driver 5: position 0, standstill, reads 41611, writes 11 timeouts 0, SG min/max 0/0
Date/time: 2022-02-06 21:33:30
Slowest loop: 0.46ms; fastest: 0.04ms
=== Storage ===
Free file entries: 10
SD card 0 not detected, interface speed: 37.5MBytes/sec
SD card longest read time 0.0ms, write time 0.0ms, max retries 0
=== Move ===
DMs created 125, maxWait 0ms, bed compensation in use: none, comp offset 0.000
=== MainDDARing ===
Scheduled moves 0, completed moves 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1
=== AuxDDARing ===
Scheduled moves 0, completed moves 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1
=== Heat ===
Bed heaters = 0 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1, chamberHeaters = -1 -1 -1 -1
=== GCodes ===
Segments left: 0
Movement lock held by null
HTTP* is doing "M122" in state(s) 0
Telnet is idle in state(s) 0
File is idle in state(s) 0
USB is idle in state(s) 0
Aux is idle in state(s) 0
Trigger* is idle in state(s) 0
Queue is idle in state(s) 0
LCD is idle in state(s) 0
SBC is idle in state(s) 0
Daemon is idle in state(s) 0
Aux2 is idle in state(s) 0
Autopause is idle in state(s) 0
Code queue is empty.
=== CAN ===
Messages queued 8222, received 3, lost 0, longest wait 0ms for reply type 0, peak Tx sync delay 13363, free buffers 49 (min 48), ts 3333/3148/0
Tx timeouts 0,0,184,13,0,94 last cancelled message type 30 dest 127
=== SBC interface ===
State: 4, failed transfers: 0, checksum errors: 0
Last transfer: 1ms ago
RX/TX seq numbers: 17441/23552
SPI underruns 0, overruns 0
Disconnects: 2, timeouts: 0, IAP RAM available 0x2c83c
Buffer RX/TX: 0/0-0
=== Duet Control Server ===
Duet Control Server v3.3.0
Code buffer space: 4096
Configured SPI speed: 8000000Hz
Full transfers per second: 35.61, max wait times: 2.8ms/0.0ms
Codes per second: 0.00
Maximum length of RX/TX data transfers: 3404/32
All have been recently purchased ( last few months ). I'm able to move my x/y/z from the 6hc no problem. Read temps etc - just nothing on the boards via can bus.
Error: M115: Response timeout: CAN addr 1, req type 6024, RID=14
M409 K”boards”
{
"key": "",
"flags": "",
"result": {
"boards": [
{},
{}
],
"directories": {},
"fans": [
null,
null,
{},
null,
{},
{},
null,
{}
],
"global": {},
"heat": {},
"inputs": [
{},
{},
{},
{},
{},
{},
{},
{},
{},
{},
{},
{}
],
"job": {},
"limits": {},
"move": {},
"network": {},
"sensors": {},
"seqs": {},
"spindles": [
{},
{}
],
"state": {},
"tools": [
{}
],
"volumes": [
{}
]
}
}
yes, after switching the order fan 2 is configured correctly now thanks!
4/3/2020, 11:12:55 AM M98 P"config.g"
HTTP is enabled on port 80
FTP is disabled
TELNET is disabled
Warning: heater 0 appears to be over-powered. If left on at full power, its temperature is predicted to reach 365C.
Warning: Macro file config-override.g not found
So thats interesting re heater 0 being over-powered. Thats the bed right? I can assure it can't get past about 210C ( can you guess why / how I know )
Nothing strikes out at me in here. config-override.g missing is just a warning - does that give a hint at an issue?
Got an interesting issue. I'm re-working my corexy bot to rrf 3 and for some reason using thermostatic control on a fan ( actually water pump but ... ) does not appear to be behaving as I'd expect.
I set the config.g up with the fans section as I read it from the docs and accounted for the firmware version 3 difference. When the board resets post save I can see the fan P2 is not configured for thermostatic control.
Below is the gcode console showing the original M106 post boot and the pasted in content from the web console showing the change.
4/2/2020, 10:17:16 PM M106 P2
Fan 2, speed: 100%, min: 10%, max: 100%, blip: 0.10, temperature: 45.0:60.0C, sensors: 1 2, current speed: 10%:
4/2/2020, 10:17:12 PM M106 P2 H1:2 T45:60
4/2/2020, 10:16:44 PM M106 P2
Fan 2, speed: 0%, min: 10%, max: 100%, blip: 0.10
I have the full config up in pastebin. I tried moving the fans section around in the config.g thinking maybe it was a parse order issue - did not work. I don't have a config-override.g.
I have not yet tried all functionality in the configuration. I've been making frame changes in addition to the firmware upgrade - still in commissioning / validation mode right now.
Any ideas?
M115
FIRMWARE_NAME: RepRapFirmware for Duet 2 WiFi/Ethernet FIRMWARE_VERSION: 3.01-RC5 ELECTRONICS: Duet WiFi 1.02 or later + DueX5 FIRMWARE_DATE: 2020-03-27b3
@dc42 Got it working thanks!
I had to set it to inverted - guessing its just the mosfet I'm using?