Noise apparent when Homing and subsises when no motion
Noise apparent when Homing and subsises when no motion
@tecno Via the overridde Condig file i have PID set and tuned and it has been working
; config-override.g file generated in response to M500 at 2021-08-20 13:36
; This is a system-generated file - do not edit
; Heater model parameters
M307 H0 R0.485 C172.485:172.485 D2.94 S1.00 V24.2 B0 I0
M307 H1 R2.429 C140.000:140.000 D5.50 S1.00 V0.0 B0 I0
Only when i started Increesing speed is when i started noticing the issue, hence why Im thinking it might be somthing a bit more indepth
@tecno the bed Has been tuned, and its quite the termal mass so its hard to beleve that there is temp swings of approx 20c
Hi guys
Ive built my self a voron V0.1 based arround a Duet 3 mini5+.
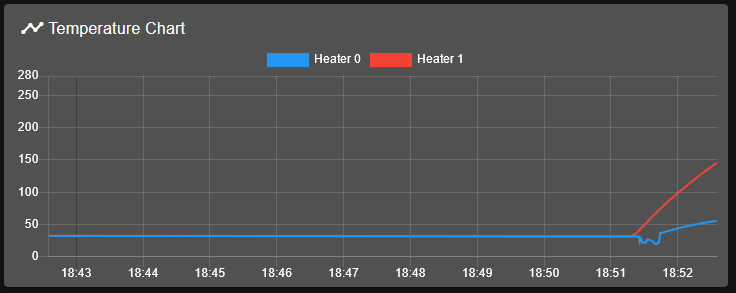
I have started cranking up the speeds and I started to knoticed an induced noise in the bed Temp, to a point wher the thermal run away kicked in and haults the print (see fig 1).
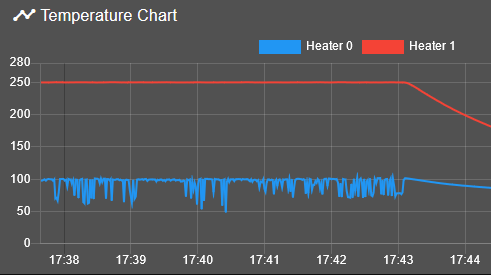
Figure 1
Has anyone come accross this issure before? Power supply voltage seems to hovver betwween 24.2V-24.3V ( Witch seems Normal, but tell me otherwise). Could it Be an EMI/ EMC issue to do with the frequency of the stepper motors, as it only occures while printing ?
I still need to do some more work to figure it out, Like read the thermistor values with a discreet meter and such. OR maybe do a frequency anslsys of the noise ( On an asside, is there any logging tools for heater temps so i can do this? ), but i woud love to hear if anyone has encountered this?
Thanks in advance
Cian
Config file showen below
; General preferences
G90 ; send absolute coordinates...
M83 ; ...but relative extruder moves
M550 P"Demhán" ; set printer name
M669 K1 ; select CoreXY mode
; Network
M551 P"********" ; set password
M552 S1 ; enable network
M586 P0 S1 ; enable HTTP
M586 P1 S0 ; disable FTP
M586 P2 S0 ; disable Telnet
; Drives
; physical drive 0.0 goes forwards
M569 P0.1 S0 ; physical drive 0.1 goes forwards
M569 P0.2 S1 ; physical drive 0.2 goes forwards
M569 P0.3 S1 ; physical drive 0.3 goes backwards
M596 P04 s1 ; physical drive 0.4 goes forwards
M584 X0.4 Y0.3 Z0.2 E0.1 ; set drive mapping
M350 X32 Y32 Z16 E16 I1 ; configure microstepping with interpolation
M566 X800.00 Y800.00 Z60.00 E400.00 ; set maximum instantaneous speed changes (mm/min)
M203 X15000.00 Y15000.00 Z900.00 E3000.00 ; set maximum speeds (mm/min)
M201 X6000.00 Y6000.00 Z1200.00 E4000.00 ; set accelerations (mm/s^2)
M906 X1500 Y1500 Z400 E600 I30 ; set motor currents (mA) and motor idle factor in per cent
M84 S30 ; Set idle timeout
M92 X160.00 Y160.00 Z400.00 ;E420.00 ; set steps per mm
M92 E1413.91
; Axis Limits
M208 X0 Y0 Z0 S1 ; set axis minima
M208 X120 Y120 Z120 S0 ; set axis maxima
; Endstops
M574 X2 S1 P"!io0.in" ; configure active-high endstop for high end on X via pin !io0.in
M574 Y2 S1 P"!io1.in" ; configure active-high endstop for high end on Y via pin !io1.in
M574 Z1 S1 P"!io2.in" ; configure active-high endstop for high end on Z via pin !io2.in
; Z-Probe
M558 P0 H5 F120 T6000 ; disable Z probe but set dive height, probe speed and travel speed
M557 X15:120 Y15:120 S20 ; define mesh grid
; Heaters
M308 S0 P"temp0" Y"thermistor" R2200 ; configure sensor 0 as PT1000 on pin temp0
M950 H0 C"out0" T0 ; create bed heater output on out0 and map it to sensor 0
M307 H0 B1 S1.00 ; enable bang-bang mode for the bed heater and set PWM limit
M140 H0 ; map heated bed to heater 0
M143 H0 S120 ; set temperature limit for heater 0 to 120C
M308 S1 P"temp1" Y"thermistor" R2200 ; configure sensor 1 as PT1000 on pin temp1
M950 H1 C"out1" T1 ; create nozzle heater output on out1 and map it to sensor 1
M307 H1 B0 S1.00 ; disable bang-bang mode for heater and set PWM limit
M143 H1 S280 ; set temperature limit for heater 1 to 280C
; Fans
M950 F0 C"out6" Q100 ; create fan 0 on pin out6 and set its frequency
M106 P0 C"Cold end Fan" S0.8 H1 T45 ; set fan 0 name and value. Thermostatic control is turned on
M950 F1 C"out5" Q250 ; create fan 1 on pin out5 and set its frequency
M106 P1 C"Part Fan" S1 H-1 ; set fan 1 name and value. Thermostatic control is turned off
; Tools
M563 P0 D0 H1 F0:1 ; define tool 0
G10 P0 X0 Y0 Z0 ; set tool 0 axis offsets
G10 P0 R0 S0 ; set initial tool 0 active and standby temperatures to 0C
T0
; Custom settings are not defined
; Miscellaneous
M501 ; load saved parameters from non-volatile memory
@dc42 , Thats understandable. Regardless of how good a product is, price will alwats be a factor
Raspi's in 3d printing arent a new thign , wether it be octoprint , the emeragince of klipper, or SBC Functionality in the duet 3 echosystem itsself
Recently ive been playing arround with some of thease, and in parrell working with the raspberry pi compute modelul 4, in other non 3d printing projects. It got me thinking intergrating a standerd main board with a dedicarted spot, heder, supply for it. Hopefully this would make for a cleaner expearance.
After a quick google there is things that people are working on somtrhing along theas lines but, personally I still have prefrance for the Duet ecosystem and RepRap Firmware.
NIce to haves would include the fillowing:
In the next few weeks or so im going to try create a hat that could interface between the two, I would love to be in a position to have the time to rework the whole MB my self but i already have too many projects on the go. Nevertheless, if this is somtheing that could be moved to devolopment/ is in devolopment, I would be more than happy to help out. I currently just graduated form a masters in electronic engineering, to having a few more projects under my belt is allways a bonus
Thanks Guys
Cian
I don't.
I've been blindly following a range of form posted and blogs so could have removed it, is it need or not if so why?
Hi guys,
Picked up a Maestro a few weeks ago and enjoying the RepRap experience to date, however, I'm struggling to get the PID for my bed to save.
Id run the autotune, that would be successful, id then try to save it. After the tune, I can let it cool down then start a print job with no issue, however, if I power down the printer and try to start a job I get there dreaded
"Error: Heating fault on heater 0, temperature rising much more slowly than the expected 1.8°C/sec"
I'm using the following firmware and bord :
Board: Duet Maestro 1.0 (duetmaestro100)
list itemFirmware: RepRapFirmware for Duet 2 Maestro 3.0 (2020-01-03b3)
I'm sure someone has hade a similar problem if there is a thread similar point me that direction
if any further info is needed let me know
Thanks in advance
Cian