Thanks @gloomyandy, I misunderstood. Changing it to:
M350 Z16 I1
M92 Z400
M906 Z300
M569 D3 P0.2 V20
G1 F60
G28 Z
G1 Z10 F60
G1 Z0 F60
made it silent. Thank you so much!
Thanks @gloomyandy, I misunderstood. Changing it to:
M350 Z16 I1
M92 Z400
M906 Z300
M569 D3 P0.2 V20
G1 F60
G28 Z
G1 Z10 F60
G1 Z0 F60
made it silent. Thank you so much!
I had a similar issue. Take a very close look at the IR receiver (the one with the black lens). In my case, the solder hadn't completely flowed underneath the pad and adding just a little bit more made it spring back to life. According to dc42, this is the first thing they look for when one of these sensors doesn't trigger.
Source: https://forum.duet3d.com/topic/20350/confusion-on-m558-for-duet-maestro-with-rrf3/13?_=1642216131349
Currently, when a point is probed, the head must move in X to the point, probe all the way down to the bed, then raise all the way back up, when it will move in X to the next point. This could be optimized by moving in X while simultaneously raising the head. I don't see an option to perform this using G29. I believe this modification could reduce probe times by quite a bit.
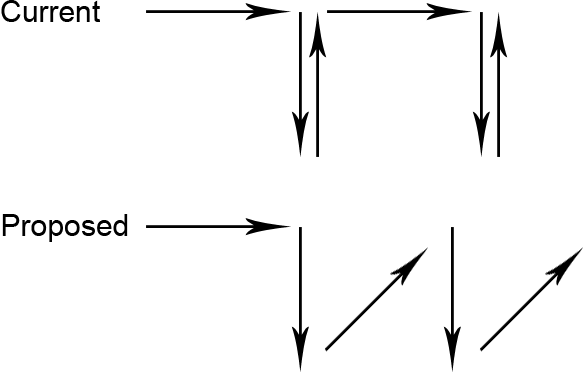
Sorry, I should have mentioned that that diagram is viewed from the X-Z plane. Eg left/right is X and up/down is Z.
I don't quite understand your edit @Phaedrux. If you were using a probe such as a switch or piezo sensor, you would be dragging the sensor across the bed. The diagonals that I had included would allow the sensor to clear the triggered state by still utilizing the dive height. This is important when it comes to highly warped beds, or for any sensor that requires contact with the bed.
Edit: Oh, I think your suggestion may work for analog non-contact probes and beds with a low amount of warp, but it would fail for anything else.
I had a similar issue. Take a very close look at the IR receiver (the one with the black lens). In my case, the solder hadn't completely flowed underneath the pad and adding just a little bit more made it spring back to life. According to dc42, this is the first thing they look for when one of these sensors doesn't trigger.
Source: https://forum.duet3d.com/topic/20350/confusion-on-m558-for-duet-maestro-with-rrf3/13?_=1642216131349
@dc42 said in InputShaping-Plugin-0.2.0-pre8-2 released:
@j3d the A parameter of M956 doesn't work yet.
Ah, so does it always evaluate to A0 currently?
I also needed to switch my accelerometer to 12 bit resolution in order to capture any meaningful results.
@mfs12 This is a really neat plugin, thanks for all your work!
I was wondering if you could make the A parameter of the M956 command editable? It seems to be hardcoded to A2 in InputShapingSession.js. I seem to get much better results with the following command in the documentation where A0 is used.
Acceleration measurements captured during movement typically show higher frequency components caused by the motors and belts. For this reason, you may get results that are easier to interpret if you collect data immediately after a sharp stop, using a command such as this:
; Duet 3 and 2, accelerometer connected to mainboard (M956 P0)
G1 X-50 G4 S2 G1 X50 F20000 M400 M956 P0 S1000 A0
Source: https://duet3d.dozuki.com/Wiki/Accelerometers#Section_Sampling_rate_and_resolution
Running the following resulted in null:
echo state.atxPowerPort
null
However entering M80 C"nil" before the M955 command seems to have worked.
I noticed the following in the change log for 3.4.0beta4. I wonder if these changes caused the issue?
state.atxPower is no longer flagged 'live'. It is present if at least one M80 or M81 command has been executed and the PS_ON port is valid.
M80 now has an optional C parameter allowing the PS_ON port and polarity to be changed
Though, as you can see, there is no M80 or M81 command in my config.
My full config is as follows:
; Configuration file for Duet 3 Mini 5+ (firmware version 3)
; executed by the firmware on start-up
;
; generated by RepRapFirmware Configuration Tool v3.2.3 on Sun Mar 07 2021 13:03:50 GMT-0500 (EST)
; General preferences
G90 ; send absolute coordinates...
M83 ; ...but relative extruder moves
M550 P"Dremel 3D20" ; set printer name
; Network
M552 P0.0.0.0 S1 ; enable network and acquire dynamic address via DHCP
M586 P0 S1 ; enable HTTP
M586 P1 S0 ; disable FTP
M586 P2 S0 ; disable Telnet
; Drives
M569 P0.0 S1 V40 ; physical drive 0.0 goes forwards
M569 P0.1 S1 V40 ; physical drive 0.1 goes forwards
M569 P0.2 S1 V20 ; physical drive 0.2 goes forwards
M569 P0.3 S1 V40 ; physical drive 0.3 goes forwards
M584 X0.0 Y0.1 Z0.2 E0.3 ; set drive mapping
M350 X16 Y16 Z16 E16 I1 ; configure microstepping with interpolation
M92 X88.89 Y88.89 Z400.00 E96.00 ; set steps per mm
M566 X900.00 Y900.00 Z12.00 E120.00 ; set maximum instantaneous speed changes (mm/min)
M203 X12000.00 Y12000.00 Z720.00 E1200.00 ; set maximum speeds (mm/min)
M201 X500.00 Y500.00 Z50.00 E250.00 ; set accelerations (mm/s^2)
M906 X680 Y680 Z320 E680 I30 ; set motor currents (mA) and motor idle factor in per cent
M84 S30 ; Set idle timeout
; Axis Limits
M208 X-80 Y0 Z0 S1 ; set axis minima
M208 X275 Y150 Z150 S0 ; set axis maxima
; Endstops
M574 X2 S1 P"!io0.in" ; configure active-high endstop for high end on X via pin !io0.in
M574 Y2 S1 P"!io1.in" ; configure active-high endstop for high end on Y via pin !io1.in
M574 Z1 S2 ; configure Z-probe endstop for low end on Z
; Z-Probe
M558 P8 C"^io3.in" H1 F240 T9000 A5 ; set Z probe type to switch and the dive height + speeds
G31 P500 X3 Y-33 Z2.485 ; set Z probe trigger value, offset and trigger height
M557 X20:200 Y20:130 S30 ; define mesh grid
; Heaters
M140 H-1 ; disable heated bed (overrides default heater mapping)
M308 S0 P"spi.cs1" Y"thermocouple-max31856" F60 ; configure sensor 0 as thermocouple via CS pin spi.cs1
M950 H0 C"out1" T0 ; create nozzle heater output on out1 and map it to sensor 0
M307 H0 R1.823 C263.1:216.5 D7.84 S1.00 V23.9
M143 H0 S280 ; set temperature limit for heater 0 to 280C
; Fans
M950 F0 C"out3" Q500 ; create fan 0 on pin out3 and set its frequency
M106 P0 C"EXTFAN" S0 H0 T45 ; set fan 0 name and value. Thermostatic control is turned on
M950 F1 C"out4" Q500 ; create fan 1 on pin out4 and set its frequency
M106 P1 C"DUETFAN" S1 H-1 ; set fan 1 name and value. Thermostatic control is turned off
M950 F2 C"out5" Q200 ; create fan 2 on pin out5 and set its frequency
M106 P2 C"PARTFAN" S0 H-1 ; set fan 2 name and value. Thermostatic control is turned off
M950 F3 C"out6" Q500 ; create fan 3 on pin out6 and set its frequency
M106 P3 C"REARFAN" S0 H-1 ; set fan 3 name and value. Thermostatic control is turned off
; Lights
M950 P0 C"io2.out" Q5000 ; create led strip on io2.out - pwm frequency is 5000 Hz
M42 P0 S0.25 ; set strip to 25% brightness
; Tools
M563 P0 D0 H0 F0:2 ; define tool 0
G10 P0 X0 Y0 Z0 ; set tool 0 axis offsets
G10 P0 R0 S0 ; set initial tool 0 active and standby temperatures to 0C
; Custom settings
M671 X65:165:116 Y10:10:150 ; set positions of bed levelling screws
M207 S0.6 F3600 T2400 ; set retraction to 0.6mm at 60mm/s / 40mm/s. Z-hop set in slicer
M572 D0 S0.025 ; set pressure advance
;M955 P0 C"io4.out+io4.in" I60 ; enable accelerometer
; Miscellaneous
T0 ; select first tool
@alex-cr Everything seems to be working to the best of my knowledge.
Hi everyone, I was wondering if anyone else was experiencing this. I am using the SD card that was provided with my Duet 3 Mini 5+. When I test it, it seems that the write speed is faster than the read speed?
M122 P104 S25
Testing SD card write speed...
SD write speed for 25.0Mbyte file was 3.74Mbytes/sec
Testing SD card read speed...
SD read speed for 25.0Mbyte file was 0.64Mbytes/sec
M122
...
=== Storage ===
Free file entries: 10
SD card 0 detected, interface speed: 22.5MBytes/sec
SD card longest read time 4.3ms, write time 166.2ms, max retries 0
...
What kinds of speeds are you all experiencing? I'm running 3.4.0beta5.
I'm in the process of attaching an accelerometer to my Duet 3 Mini 5+ on IO_4. It seemed to connect just fine with 3.3, but after upgrading to 3.4.0beta5, I now get the following error when issuing this M955 command:
M955 P0 C"io4.out+io4.in" I60
Error: M955: Pin 'io4.out' is not free
I am aware that io4.out is shared with pson, but I don't see any way to disable that function? This seemed to work just fine with 3.3, so I'm wondering if this is a regression?
@dc42 said in [Coming soon: Accelerometer Support]
Yes, use the temp daughterboard connector to connect an accelerometer directly. The SBC uses a separate SPI bus. However, currently accelerometer data can only be saved to file when running in standalone mode.
Will this still work if you have a temperature daughterboard installed? I'm utilizing the thermocouple board on a Mini 5+.