@Phaedrux Thx again, im going to play with it.
Is there anywhere some documentation regarding the new config styles and homing scripts?
@Phaedrux Thx again, im going to play with it.
Is there anywhere some documentation regarding the new config styles and homing scripts?
Ive edit my m208 size for the new situation in my new config. So that’s probably also not it.
Is it possible to use the old scripts instead of the new scripts?
Ive checked them all before homing and the work correctly. The status reports also give the right values back when manually activating them.
Hello Guys,
Ive changed over to a coreXY on my ender 5 plus.
But now i have some issues with the endstops. (ive kept them on the same place as before)
When i home x/y seperatly it moves the Z up and down and is then finished.
When i do home all its try to run through the y endstop on de 2020 @ the north side.
Wen i home z is homes z.
The movemens of the head are good, ive tested them with the commisioning tab of the corexy documentation.
But with the new home files, i just dont really understand what it says. So i will post them here and hope for the best.
the "old" are the one from before i went to corexy
config.g homeall.g homex.g homey.g homez.g old_config.g old_homeall.g old_homex.g old_homey.g old_homez.g
Ah, i see/read what you ment. But then the answer is no, i have not enabled logging.
Do you know something about my question i asked earlier?
"So is there something i can "tweak" so that it perhaps is a bit less sensitive?" and maybe doesn't give the errors? Because
its not affecting my prints. (As far i can tell).
@Phaedrux Ill will look for another SD, probably will find one.
~~I cant seem to find the log, or the option in the manual for DWC?
Any pointers to find out/activate it?~~
I find something, ill look into it after my print is done with printing.
It was in the GCode dictionary
EDIT 2
Can i just add this to the end of my GCode? @Phaedrux
; Miscellaneous
M501 ; load saved parameters from non-volatile memory
M929 P"eventlog.txt" S1 ; start logging warnings to file eventlog.txt
M929 P"eventlog.txt" S2 ; start logging Info to file eventlog.txt
M929 P"eventlog.txt" S3 ; start logging DEBUG to file eventlog.txt
@Phaedrux Indeed, and im on my second set of wiring and its still giving me errors on the extruder.
I will check if i can find a replacement motor for my E3D Hemera, perhaps ill mount the XS motor if its fits.
What does seems "funny" that the errors don't screw up my prints.. So is there something i can "tweak" that its perhaps a bit less sensitive?
But i also get a lot of connection errors? Wondering if they are connected? I already did some searching and put my AJAX from 3 to 5. And when its done printing i will also update my Paneldue 7i to latest firmware.
See a small section of the errors now below, and thanks for coming back every time. Much appreciated.
3-6-2024 18:39:04 Connection established
3-6-2024 18:38:58 Connection interrupted, attempting to reconnect...
Operation failed (Reason: Service Unavailable)
3-6-2024 18:38:55 Connection established
3-6-2024 18:38:55 Connection interrupted, attempting to reconnect...
Operation failed (Reason: Service Unavailable)
3-6-2024 18:38:52 Connection established
3-6-2024 18:38:52 Connection interrupted, attempting to reconnect...
Operation failed (Reason: Service Unavailable)
3-6-2024 18:38:49 Connection established
3-6-2024 18:38:49 Connection interrupted, attempting to reconnect...
Operation failed (Reason: Service Unavailable)
3-6-2024 18:38:46 Connection established
3-6-2024 18:38:45 Connection interrupted, attempting to reconnect...
Operation failed (Reason: Service Unavailable)
3-6-2024 18:38:42 Connection established
3-6-2024 18:38:42 Connection interrupted, attempting to reconnect...
Operation failed (Reason: Service Unavailable)
3-6-2024 18:38:39 Connection established
3-6-2024 18:38:39 Connection interrupted, attempting to reconnect...
Operation failed (Reason: Service Unavailable)
3-6-2024 18:38:36 Connection established
3-6-2024 18:38:36 Connection interrupted, attempting to reconnect...
Operation failed (Reason: Service Unavailable)
3-6-2024 18:38:31 Warning: Driver 0.4 warning: phase A may be disconnected
3-6-2024 18:38:31 Warning: Driver 0.4 warning: phase A may be disconnected, phase B may be disconnected
3-6-2024 18:37:01 Warning: Driver 0.4 warning: phase A may be disconnected
3-6-2024 18:01:10 Warning: Driver 0.4 warning: phase A may be disconnected
3-6-2024 17:38:38 Warning: Driver 0.4 warning: phase A may be disconnected
3-6-2024 16:56:41 Leadscrew adjustments made: 0.003 0.019, points used 2, (mean, deviation) before (0.011, 0.006) after (-0.000, 0.000)
3-6-2024 16:56:29 Leadscrew adjustments made: 0.099 0.062, points used 2, (mean, deviation) before (0.081, 0.013) after (-0.000, 0.000)
3-6-2024 16:54:56 File 0:/gcodes/Rear_left_lower_PETG_6h10m.gcode selected for printing
Well i switched 0.3 with 0.4. (extruder was 0.3 and now 0.4, one of the z motors is now on 0.3)
(can you double check old vs new if i did it correctly?)
So am i right to conclude there is something wrong with the steppenmotor of my E3D Hemera? @Phaedrux
2-6-2024, 10:16:12 Warning: Driver 0.4 warning: phase B may be disconnected
2-6-2024, 09:59:06 Leadscrew adjustments made: -0.003 0.011, points used 2, (mean, deviation) before (0.004, 0.005) after (0.000, 0.000)
2-6-2024, 09:58:55 Leadscrew adjustments made: 0.115 0.070, points used 2, (mean, deviation) before (0.093, 0.016) after (0.000, 0.000)
2-6-2024, 09:58:08 File 0:/gcodes/corner_brace_3m_bolts_PETG_44m55s.gcode selected for printing
New
; Drives
M569 P0.0 S0 ; physical drive 0.0 goes backwards
M569 P0.1 S0 ; physical drive 0.1 goes backwards
M569 P0.2 S0 ; physical drive 0.2 goes backwards (Z Axis Left)
M569 P0.3 S0 ; physical drive 0.4 goes backwards (Z Axis Right)
M569 P0.4 S0 ; physical drive 0.3
M584 X0.0 Y0.1 Z0.2:0.3 E0.4 ; set drive mapping
M350 X16 Y16 Z16 E16 I1 ; configure microstepping with interpolation
M92 X80.00 Y80.00 Z800.00 E394.26 ; set steps per mm
M566 X1200.00 Y1200.00 Z60.00 E3000.00 ; set maximum instantaneous speed changes (mm/min)(was X900.00 Y900.00 Z60.00(600) E120.00)
M203 X5000.00 Y5000.00 Z180.00 E5000.00 ; set maximum speeds (mm/min)(was X6000.00 Y6000.00 Z180.00 E1200.00)
M201 X1500.00 Y1500.00 Z20.00 E5000.00 ; set accelerations (mm/s^2)(was X500.00 Y500.00 Z20.00(80) E500.00)
M906 X800 Y800 Z800 E800 I30 ; set motor currents (mA) and motor idle factor in per cent(was X800 Y800 Z800 E800 I30)
M84 S30 ; Set idle timeout
Old
; Drives
M569 P0.0 S0 ; physical drive 0.0 goes backwards
M569 P0.1 S0 ; physical drive 0.1 goes backwards
M569 P0.2 S0 ; physical drive 0.2 goes backwards (Z Axis Left)
M569 P0.3 S0 ; physical drive 0.3 goes backwards
M569 P0.4 S0 ; physical drive 0.4 goes backwards (Z Axis Right)
M584 X0.0 Y0.1 Z0.2:0.4 E0.3 ; set drive mapping
M350 X16 Y16 Z16 E16 I1 ; configure microstepping with interpolation
M92 X80.00 Y80.00 Z800.00 E394.26 ; set steps per mm
M566 X1200.00 Y1200.00 Z60.00 E3000.00 ; set maximum instantaneous speed changes (mm/min)(was X900.00 Y900.00 Z60.00(600) E120.00)
M203 X5000.00 Y5000.00 Z180.00 E5000.00 ; set maximum speeds (mm/min)(was X6000.00 Y6000.00 Z180.00 E1200.00)
M201 X1500.00 Y1500.00 Z20.00 E5000.00 ; set accelerations (mm/s^2)(was X500.00 Y500.00 Z20.00(80) E500.00)
M906 X800 Y800 Z800 E800 I30 ; set motor currents (mA) and motor idle factor in per cent(was X800 Y800 Z800 E800 I30)
M84 S30 ; Set idle timeout
extra information:
2-6-2024, 21:10:48 Finished printing file 0:/gcodes/blank_carriage_PETG_5h26m.gcode, print time was 6h 14m
2-6-2024, 20:51:29 Warning: Driver 0.4 warning: phase A may be disconnected, phase B may be disconnected
2-6-2024, 20:20:03 Warning: Driver 0.4 warning: phase A may be disconnected
2-6-2024, 19:48:10 Warning: Driver 0.4 warning: phase B may be disconnected
2-6-2024, 19:46:37 Warning: Driver 0.4 warning: phase B may be disconnected
2-6-2024, 19:44:45 Warning: Driver 0.4 warning: phase A may be disconnected
2-6-2024, 19:38:50 Warning: Driver 0.4 warning: phase A may be disconnected
2-6-2024, 19:29:59 m122
=== Diagnostics ===
RepRapFirmware for Duet 3 Mini 5+ version 3.5.1 (2024-04-19 14:41:25) running on Duet 3 Mini5plus Ethernet (standalone mode)
Board ID: 5QZRJ-6F6M2-G65J0-409FD-3Q81Z-72HAQ
Used output buffers: 8 of 40 (40 max)
=== RTOS ===
Static ram: 103232
Dynamic ram: 116100 of which 12 recycled
Never used RAM 18112, free system stack 122 words
Tasks: NETWORK(1,ready,76.0%,180) ETHERNET(5,nWait 7,0.2%,567) HEAT(3,nWait 1,0.2%,326) Move(4,nWait 6,6.2%,237) CanReceiv(6,nWait 1,0.0%,940) CanSender(5,nWait 7,0.0%,336) CanClock(7,delaying,0.0%,334) TMC(4,nWait 6,2.6%,68) MAIN(1,running,12.2%,665) IDLE(0,ready,0.0%,30) AIN(4,delaying,2.7%,260), total 100.0%
Owned mutexes:
=== Platform ===
Last reset 04:39:09 ago, cause: power up
Last software reset at 2024-06-02 10:55, reason: User, Gcodes spinning, available RAM 18184, slot 1
Software reset code 0x0003 HFSR 0x00000000 CFSR 0x00000000 ICSR 0x00487000 BFAR 0xe000ed38 SP 0x00000000 Task MAIN Freestk 0 n/a
Error status: 0x04
Aux0 errors 0,1,0
MCU revision 0, ADC conversions started 16749063, completed 16749063, timed out 0, errs 0
MCU temperature: min 24.8, current 47.6, max 47.9
Supply voltage: min 23.6, current 23.9, max 24.4, under voltage events: 0, over voltage events: 0, power good: yes
Heap OK, handles allocated/used 99/3, heap memory allocated/used/recyclable 2048/176/56, gc cycles 0
Events: 14 queued, 14 completed
Driver 0: ok, SG min 0, read errors 0, write errors 0, ifcnt 14, reads 29302, writes 14, timeouts 0, DMA errors 0, CC errors 0
Driver 1: ok, SG min 0, read errors 0, write errors 0, ifcnt 14, reads 29301, writes 14, timeouts 0, DMA errors 0, CC errors 0
Driver 2: ok, SG min 0, read errors 0, write errors 0, ifcnt 14, reads 29301, writes 14, timeouts 0, DMA errors 0, CC errors 0
Driver 3: ok, SG min 0, read errors 0, write errors 0, ifcnt 14, reads 29301, writes 14, timeouts 0, DMA errors 0, CC errors 0
Driver 4: ok, SG min 0, read errors 0, write errors 0, ifcnt 12, reads 29304, writes 12, timeouts 0, DMA errors 0, CC errors 0
Driver 5: not present
Driver 6: not present
Date/time: 2024-06-02 15:47:29
Cache data hit count 4294967295
Slowest loop: 225.69ms; fastest: 0.13ms
=== Storage ===
Free file entries: 19
SD card 0 detected, interface speed: 22.5MBytes/sec
SD card longest read time 4.9ms, write time 79.8ms, max retries 0
=== Move ===
DMs created 83, segments created 46, maxWait 339966ms, bed compensation in use: mesh, height map offset 0.000, max steps late 1, min interval 0, bad calcs 0, ebfmin 0.00, ebfmax 1.00
next step interrupt due in 174 ticks, enabled
Moves shaped first try 36396, on retry 2560, too short 106922, wrong shape 35365, maybepossible 5431
=== DDARing 0 ===
Scheduled moves 194886, completed 194876, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state 3
=== DDARing 1 ===
Scheduled moves 0, completed 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1
=== Heat ===
Bed heaters 0 -1 -1 -1, chamber heaters -1 -1 -1 -1, ordering errs 0
Heater 0 is on, I-accum = 0.4
Heater 1 is on, I-accum = 0.5
=== GCodes ===
Movement locks held by null, null
HTTP is idle in state(s) 0
Telnet is idle in state(s) 0
File is doing "G1 X108.786 Y129.904 E1.61464" in state(s) 0
USB is idle in state(s) 0
Aux is idle in state(s) 0
Trigger is idle in state(s) 0
Queue is idle in state(s) 0
LCD is idle in state(s) 0
SBC is idle in state(s) 0
Daemon is idle in state(s) 0
Aux2 is idle in state(s) 0
Autopause is idle in state(s) 0
File2 is idle in state(s) 0
Queue2 is idle in state(s) 0
Q0 segments left 1, axes/extruders owned 0x0000807
Code queue 0 is empty
Q1 segments left 0, axes/extruders owned 0x0000000
Code queue 1 is empty
=== CAN ===
Messages queued 150740, received 0, lost 0, errs 79636997, boc 0
Longest wait 0ms for reply type 0, peak Tx sync delay 0, free buffers 26 (min 26), ts 83746/0/0
Tx timeouts 0,0,83745,0,0,66993 last cancelled message type 30 dest 127
=== Network ===
Slowest loop: 80.64ms; fastest: 0.03ms
Responder states: MQTT(0) HTTP(0) HTTP(0) HTTP(0) HTTP(0) FTP(0) Telnet(0)
HTTP sessions: 1 of 8
= Ethernet =
Interface state: active
Error counts: 0 0 0 0 0 0
Socket states: 5 2 2 2 2 0 0 0
Unfortunately its still there.. And also after only the update - back up and format SD card i have some laying down first layer problems i need to address. And it looks like some extrusion problems with printing but not sure yet.
Connection interrupted it also a new one.
Have to look in to it,
30-5-2024 22:52:37 Connection established
30-5-2024 22:52:37 Connection interrupted, attempting to reconnect...
Operation failed (Reason: Service Unavailable)
30-5-2024 22:52:32 Warning: Driver 0.3 warning: phase A may be disconnected
30-5-2024 22:50:12 Warning: Driver 0.3 warning: phase B may be disconnected
Warning: Driver 0.3 warning: phase A may be disconnected, phase B may be disconnected
30-5-2024 22:27:07 Connection established
30-5-2024 22:27:07 Connection interrupted, attempting to reconnect...
Operation failed (Reason: Service Unavailable)
30-5-2024 22:27:04 Connection established
30-5-2024 22:27:04 Connection interrupted, attempting to reconnect...
Operation failed (Reason: Service Unavailable)
30-5-2024 22:26:58 Warning: Driver 0.3 warning: phase B may be disconnected
30-5-2024 22:07:30 Warning: Driver 0.3 warning: phase B may be disconnected
30-5-2024 22:06:51 Connection established
30-5-2024 22:06:51 Connection interrupted, attempting to reconnect...
Operation failed (Reason: Service Unavailable)
30-5-2024 22:06:46 Warning: Driver 0.3 warning: phase B may be disconnected
Warning: Driver 0.3 warning: phase A may be disconnected, phase B may be disconnected
30-5-2024 22:03:42 Warning: Driver 0.3 warning: phase B may be disconnected
30-5-2024 21:14:47 Warning: Driver 0.3 warning: phase A may be disconnected
Thanks (again) for the reply. I have updated the firmware. And backup-ed and format my 8gb SDcard.
It up and running and i will test it tomorrow again.
If something is faulty hardware side, i think its the driver or the motor. I already made a new cabel to rule out the bad krimping.
Hello,
Like the titles is mentioning; im getting warning errors for my extruder driver.
Sinds 2-3 days. Its also really killing my prints because some times it stops extruding...
So i find a finished print but not completed.
Ive traces the wiring, and even just for the sake of it, made a new wire and put it outside my printer for testing purposes.
(that was after i paused the print @ 14;46 today. And you can see i got 2 times B back after resuming.) It does still extrude
but it annoys me.
I don't have a spare driver anymore, but perhaps im going to switch that out and remodel my config for it.
Specs:
Ender 5 plus with Duet3d 3 mini 5+ LAN
E3D Hemera 24v DD extruder
Paneldeu 7i.
FYI. I also have sometimes a Memorycard fault that im looking, regarding not enough space.
26-5-2024 17:29:15 Finished printing file 0:/gcodes/MountingPlate_PETG_2h3m.gcode, print time was 2h 24m
26-5-2024 17:21:28 Warning: Driver 0.3 warning: phase A may be disconnected
26-5-2024 17:01:30 Warning: Driver 0.3 warning: phase A may be disconnected
26-5-2024 16:56:08 Warning: Driver 0.3 warning: phase A may be disconnected, phase B may be disconnected
26-5-2024 16:36:53 Warning: Driver 0.3 warning: phase B may be disconnected
26-5-2024 16:17:12 Warning: Driver 0.3 warning: phase B may be disconnected
26-5-2024 16:12:09 Printing resumed
26-5-2024 15:46:38 Printing paused at X186.3 Y210.0 Z3.5
26-5-2024 15:46:33 Resume state saved
26-5-2024 15:45:28 Warning: Driver 0.3 warning: phase A may be disconnected
26-5-2024 15:27:49 Warning: Driver 0.3 warning: phase A may be disconnected
26-5-2024 15:20:55 Warning: Driver 0.3 warning: phase B may be disconnected
26-5-2024 14:52:40 Warning: Driver 0.3 warning: phase A may be disconnected
26-5-2024 14:47:02 === Diagnostics ===
RepRapFirmware for Duet 3 Mini 5+ version 3.5.0-rc.3 (2024-01-24 17:56:48) running on Duet 3 Mini5plus Ethernet (standalone mode)
Board ID: 5QZRJ-6F6M2-G65J0-409FD-3Q81Z-72HAQ
Used output buffers: 10 of 40 (40 max)
=== RTOS ===
Static ram: 103200
Dynamic ram: 115480 of which 12 recycled
Never used RAM 18980, free system stack 126 words
Tasks: NETWORK(1,ready,27.5%,173) ETHERNET(5,nWait 7,0.2%,570) HEAT(3,nWait 6,0.0%,332) Move(4,nWait 6,0.4%,244) CanReceiv(6,nWait 1,0.0%,939) CanSender(5,nWait 7,0.0%,337) CanClock(7,delaying,0.0%,335) TMC(4,nWait 6,0.8%,68) MAIN(1,running,70.2%,649) IDLE(0,ready,0.1%,30) AIN(4,delaying,0.8%,260), total 100.0%
Owned mutexes:
=== Platform ===
Last reset 00:26:37 ago, cause: power up
Last software reset at 2024-05-25 03:36, reason: User, Gcodes spinning, available RAM 18484, slot 0
Software reset code 0x0003 HFSR 0x00000000 CFSR 0x00000000 ICSR 0x00489000 BFAR 0xe000ed38 SP 0x00000000 Task MAIN Freestk 0 n/a
Error status: 0x04
Aux0 errors 0,1,0
MCU revision 0, ADC conversions started 1598383, completed 1598381, timed out 0, errs 0
MCU temperature: min 25.3, current 45.5, max 45.5
Supply voltage: min 23.9, current 24.0, max 24.4, under voltage events: 0, over voltage events: 0, power good: yes
Heap OK, handles allocated/used 99/1, heap memory allocated/used/recyclable 2048/108/80, gc cycles 0
Events: 0 queued, 0 completed
Driver 0: ok, SG min 0, read errors 0, write errors 0, ifcnt 18, reads 18518, writes 18, timeouts 0, DMA errors 0, CC errors 0
Driver 1: ok, SG min 0, read errors 0, write errors 0, ifcnt 18, reads 18518, writes 18, timeouts 0, DMA errors 0, CC errors 0
Driver 2: ok, SG min 0, read errors 0, write errors 0, ifcnt 18, reads 18517, writes 18, timeouts 0, DMA errors 0, CC errors 0
Driver 3: ok, SG min 0, read errors 0, write errors 0, ifcnt 14, reads 18521, writes 14, timeouts 0, DMA errors 0, CC errors 0
Driver 4: ok, SG min 0, read errors 0, write errors 0, ifcnt 18, reads 18518, writes 18, timeouts 0, DMA errors 0, CC errors 0
Driver 5: not present
Driver 6: not present
Date/time: 2024-05-26 14:47:01
Cache data hit count 2594616740
Slowest loop: 265.41ms; fastest: 0.10ms
=== Storage ===
Free file entries: 18
SD card 0 detected, interface speed: 22.5MBytes/sec
SD card longest read time 5.0ms, write time 10.4ms, max retries 0
=== Move ===
DMs created 83, segments created 37, maxWait 910275ms, bed compensation in use: mesh, height map offset 0.000, max steps late 1, ebfmin -1.00, ebfmax 1.00
next step interrupt due in 320 ticks, enabled
Moves shaped first try 237, on retry 12, too short 146, wrong shape 2506, maybepossible 1
=== DDARing 0 ===
Scheduled moves 3181, completed 3173, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 3], CDDA state 3
=== DDARing 1 ===
Scheduled moves 0, completed 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1
=== Heat ===
Bed heaters 0 -1 -1 -1, chamber heaters -1 -1 -1 -1, ordering errs 0
Heater 0 is on, I-accum = 0.4
Heater 1 is on, I-accum = 0.5
=== GCodes ===
Movement locks held by null, null
HTTP is idle in state(s) 0
Telnet is idle in state(s) 0
File is idle in state(s) 3
USB is idle in state(s) 0
Aux is idle in state(s) 0
Trigger is idle in state(s) 0
Queue is idle in state(s) 0
LCD is idle in state(s) 0
SBC is idle in state(s) 0
Daemon is idle in state(s) 0
Aux2 is idle in state(s) 0
Autopause is idle in state(s) 0
File2 is idle in state(s) 0, sync state 1
Queue2 is idle in state(s) 0
Q0 segments left 3, axes/extruders owned 0x0000807
Code queue 0 is empty
Q1 segments left 0, axes/extruders owned 0x0000000
Code queue 1 is empty
=== CAN ===
Messages queued 14380, received 0, lost 0, errs 7612244, boc 0
Longest wait 0ms for reply type 0, peak Tx sync delay 0, free buffers 26 (min 26), ts 7990/0/0
Tx timeouts 0,0,7989,0,0,6389 last cancelled message type 4514 dest 127
=== Network ===
Slowest loop: 228.32ms; fastest: 0.03ms
Responder states: MQTT(0) HTTP(0) HTTP(0) HTTP(0) HTTP(0) FTP(0) Telnet(0)
HTTP sessions: 2 of 8
= Ethernet =
Interface state: active
Error counts: 0 0 0 0 0 0
Socket states: 5 2 2 2 2 0 0 0
26-5-2024 14:41:03 Leadscrew adjustments made: 0.002 0.004, points used 2, (mean, deviation) before (0.003, 0.001) after (-0.000, 0.000)
26-5-2024 14:40:52 Leadscrew adjustments made: 0.066 0.105, points used 2, (mean, deviation) before (0.085, 0.014) after (0.000, 0.000)
26-5-2024 14:39:39 File 0:/gcodes/MountingPlate_PETG_2h3m.gcode selected for printing
26-5-2024 14:28:38 SD card in slot 0: capacity 7.95GB, partition size 0.26GB, free space 0.17GB, speed 22.50MBytes/sec, cluster size 512 bytes
Config:
; Configuration file for Duet 3 Mini 5+ (firmware version 3.5)
; executed by the firmware on start-up
;
; generated by RepRapFirmware Configuration Tool v3.3.16 on Wed Dec 13 2023 21:57:46 GMT+0100 (Midden-Europese standaardtijd)
; General preferences
M575 P1 S1 B57600 ; enable support for PanelDue
G90 ; send absolute coordinates...
M83 ; ...but relative extruder moves
M550 P"Ender 5 Plus" ; set printer name
; Network
M552 P192.168.178.96 S1 ; enable network and set IP address
M553 P255.255.255.0 ; set netmask
M554 P192.168.178.1 ; set gateway
M586 P0 S1 ; enable HTTP
M586 P1 S0 ; disable FTP
M586 P2 S0 ; disable Telnet
; Drives
M569 P0.0 S0 ; physical drive 0.0 goes backwards
M569 P0.1 S0 ; physical drive 0.1 goes backwards
M569 P0.2 S0 ; physical drive 0.2 goes backwards (Z Axis Left)
M569 P0.3 S0 ; physical drive 0.3 goes backwards
M569 P0.4 S0 ; physical drive 0.4 goes backwards (Z Axis Right)
M584 X0.0 Y0.1 Z0.2:0.4 E0.3 ; set drive mapping
M350 X16 Y16 Z16 E16 I1 ; configure microstepping with interpolation
M92 X80.00 Y80.00 Z800.00 E394.26 ; set steps per mm
M566 X1200.00 Y1200.00 Z60.00 E3000.00 ; set maximum instantaneous speed changes (mm/min)(was X900.00 Y900.00 Z60.00(600) E120.00)
M203 X5000.00 Y5000.00 Z180.00 E5000.00 ; set maximum speeds (mm/min)(was X6000.00 Y6000.00 Z180.00 E1200.00)
M201 X1500.00 Y1500.00 Z20.00 E5000.00 ; set accelerations (mm/s^2)(was X500.00 Y500.00 Z20.00(80) E500.00)
M906 X800 Y800 Z800 E800 I30 ; set motor currents (mA) and motor idle factor in per cent(was X800 Y800 Z800 E800 I30)
M84 S30 ; Set idle timeout
; Axis Limits
M208 X0 Y0 Z0 S1 ; set axis minima
M208 X350 Y335 Z400 S0 ; set axis maxima
; Endstops
M574 X2 S1 P"!io5.in" ; configure switch-type (e.g. microswitch) endstop for high end on X via pin !io5.in
M574 Y2 S1 P"!io6.in" ; configure switch-type (e.g. microswitch) endstop for high end on Y via pin !io6.in
M574 Z1 S2 ; configure Z-probe endstop for low end on Z
; Z-Probe
M950 S0 C"io3.out" ; create servo pin 0 for BLTouch
M558 P9 C"io3.in" H2 F120 T6000 ; set Z probe type to bltouch and the dive height + speeds
G31 P500 X-33 Y-5 Z3.786 ; set Z probe trigger value, offset and trigger height
M557 X25:315 Y40:310 S19.3:18 ; define mesh grid
; Bed adjustment screw locations
M671 X-33:383 Y166:166 S8 ;Z pivot points are at Left(-33,166) and Right(383,166)
; Heaters
M308 S0 P"temp0" Y"thermistor" T98801 B4185 ; configure sensor 0 as thermistor on pin temp0
M950 H0 C"out0" T0 ; create bed heater output on out0 and map it to sensor 0
M307 H0 B0 S1.00 ; Disable bang-bang mode for the bed heater and set PWM limit
M140 H0 ; map heated bed to heater 0
M143 H0 S120 ; set temperature limit for heater 0 to 120C
M308 S1 P"temp1" Y"thermistor" T100000 B4725 C7.06e-8 ; configure sensor 1 as thermistor on pin temp1
M950 H1 C"out1" T1 ; create nozzle heater output on out1 and map it to sensor 1
M307 H1 B0 S1.00 ; disable bang-bang mode for heater and set PWM limit
M143 H1 S285 ; set temperature limit for heater 1 to 285C
; Extruder Fan
M950 F1 C"out3" Q500 ; create fan 1 on pin out3 and set its frequency
M106 P1 C"Extruder" S1 H1 T60 ; set fan 1 name and value. Thermostatic control is turned on
; Part Fan
M950 F0 C"out4" Q100 ; create fan 0 on pin out4 and set its frequency
M106 P0 C"Part" S0 H-1 ; set fan 0 name and value. Thermostatic control is turned off
; Tools
M563 P0 D0 H1 F0 ; define tool 0
G10 P0 X0 Y0 Z0 ; set tool 0 axis offsets
G10 P0 R0 S0 ; set initial tool 0 active and standby temperatures to 0C
; Input Shaping accelerometer
;M955 P0 C"spi.cs2+spi.cs1" I14 ; Oriantation 14(+X to -X) all wires connected to temp DB connector, no temperature daughterboard
M593 P"ZVDDD" F54 S0.15 ; use ZVDDD input shaping to cancel ringing at 54Hz with a damping factor of 0.15 with 2 moves
; Custom settings are not defined
; Miscellaneous
M501 ; load saved parameters from non-volatile memory
@droftarts Thx, that was is. I really thought i had the right firmware. After updating it works instantly.
I do have now the end stop plug in not working anymore;
Failed to start plugin
Loading chunk EndstopsMonitor failed.
(missing: http://192.168.178.96/js/EndstopsMonitor.0416dadf.js)
But i only used it when setting up the machine. Now i'm going to be busy with the Input shaping plugin. Wish me luck and thanks for the help.
As in code in the console instead of .2 and .1? Or physical connection? I’ve tried yesterday some different options in the console but no luck with that.
Could you point me to the discord? Perhaps I can find there some other information.
So i just got my Duet Accelerometer(new) installed on my ender 5+ with a 3 mini 5+.
But after the hole evening trying and reading and measuring im a bit lost.
M955 P0 C"spi.cs2+spi.cs1" I14 q500000
Error: M955: Accelerometer not found on specified port
So summarize what i did;
ive read:
https://docs.duet3d.com/en/Duet3D_hardware/Accessories/Duet3D_Accelerometer
https://docs.duet3d.com/User_manual/Connecting_hardware/Sensors_Accelerometer
https://docs.duet3d.com/User_manual/Reference/Gcodes#m955-configure-accelerometer
Uses this wiring diagram
https://docs.duet3d.com/duet_boards/duet_3_mini_5_plus/duet3_mini5+_v0.5-v1.02_d1.5_wiring.png
And did this
M955 P0 C"spi.cs2+spi.cs1" I14 q500000
I assume the supplied cable (1meter?) is good enough the make it work? Or do i need to go MacGyver and add resistors/thin film etc?
Some pictures;
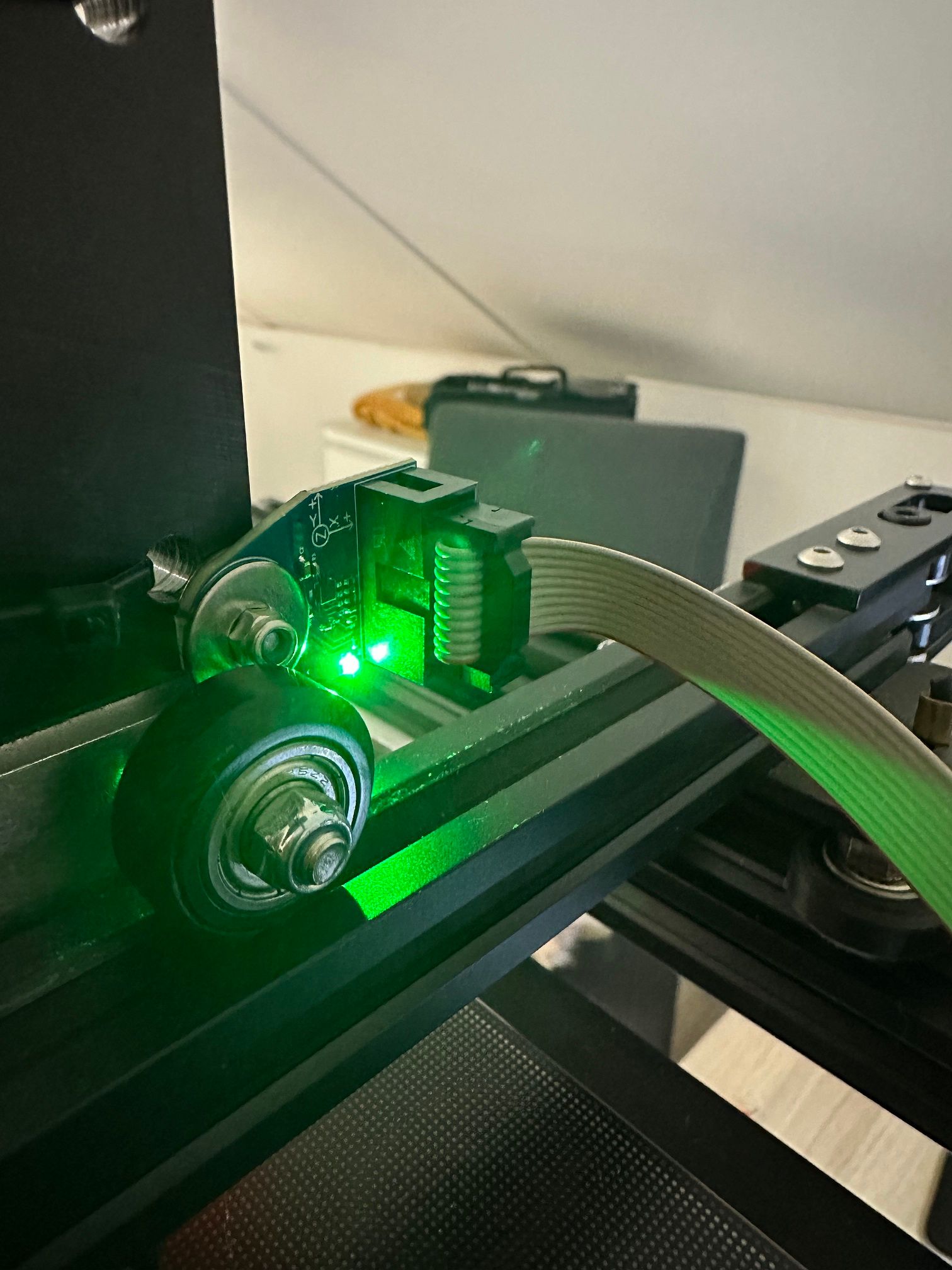
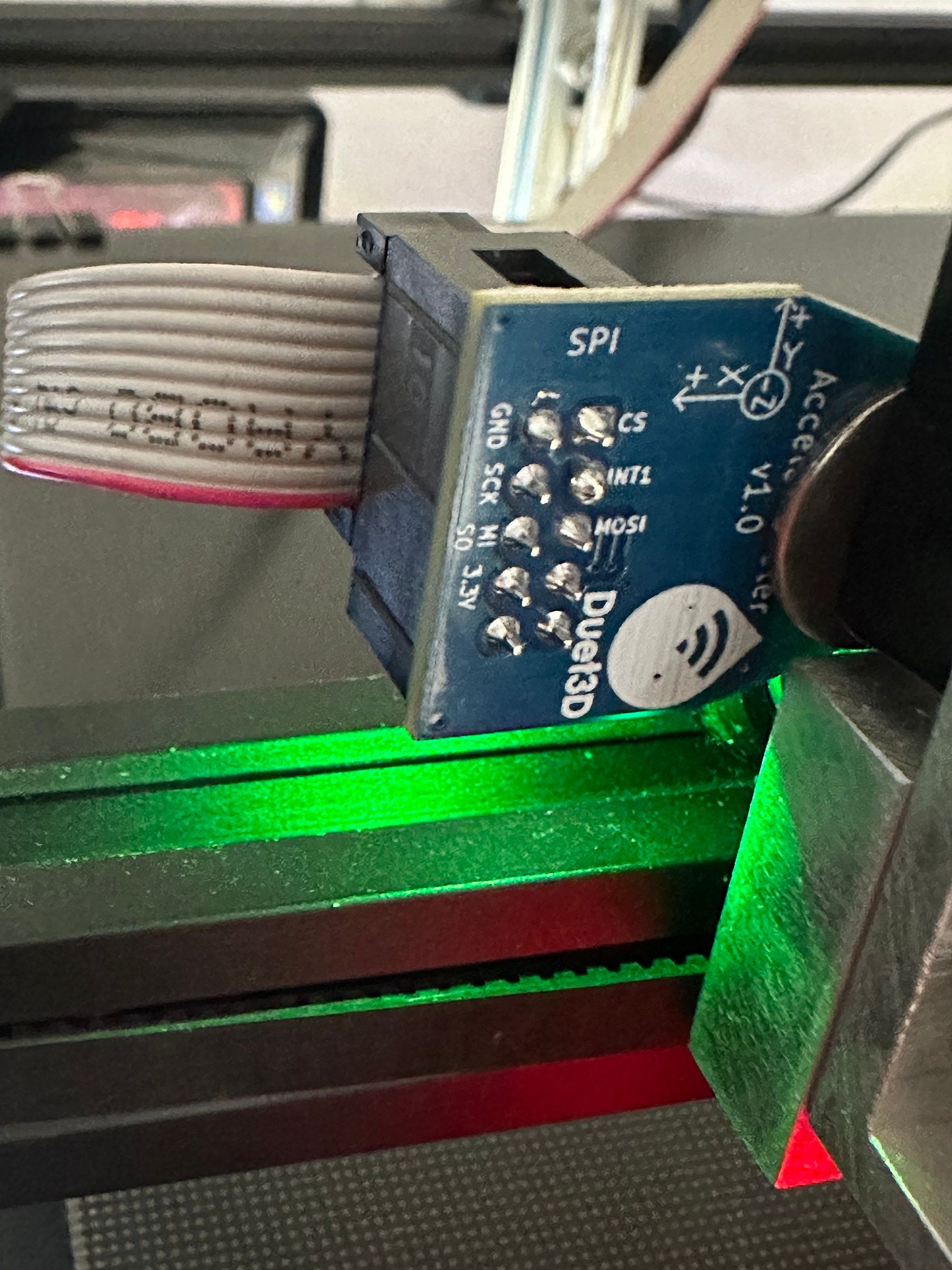
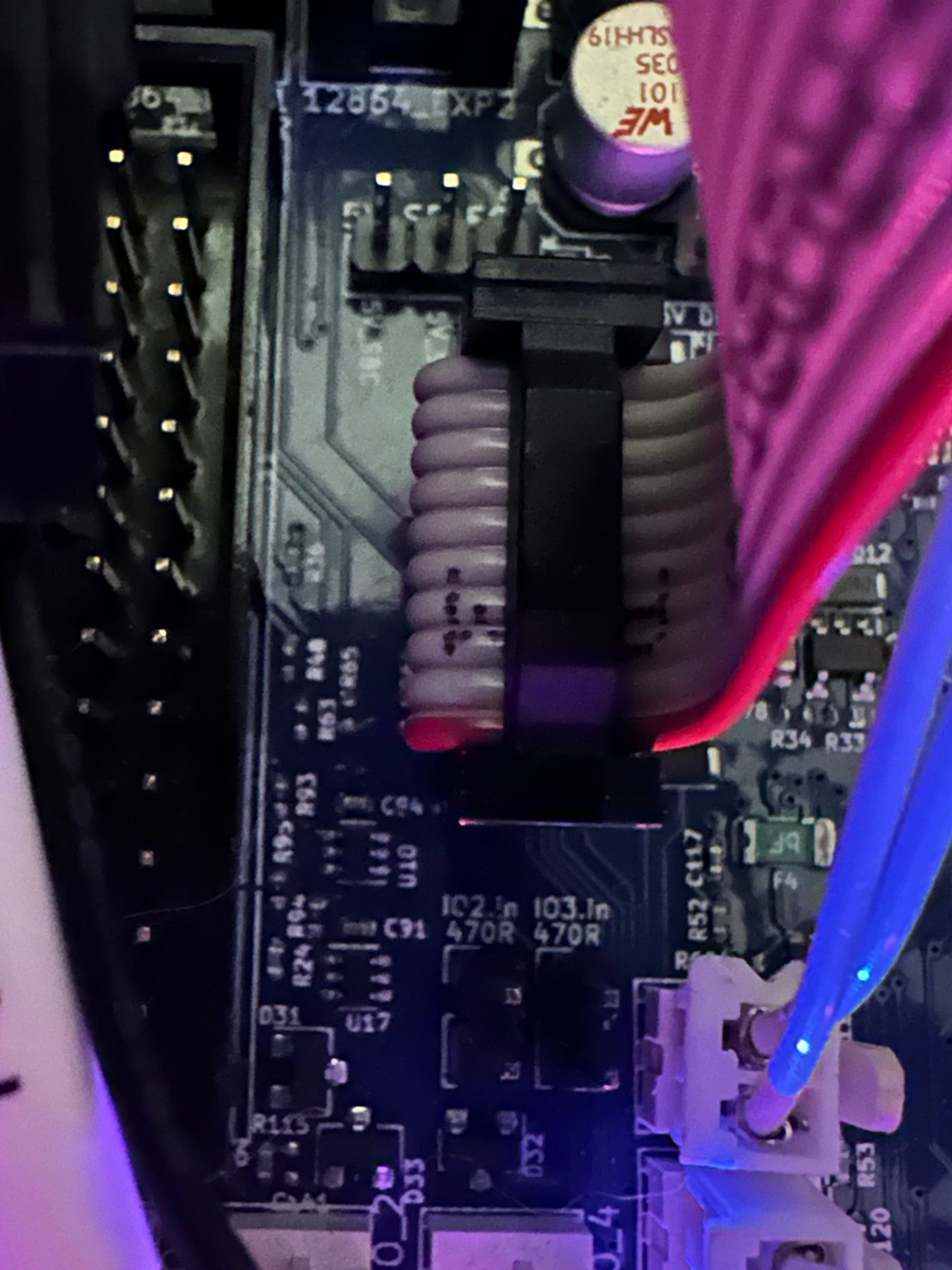

and i added config and m115 command for firmware;
m115
FIRMWARE_NAME: RepRapFirmware for Duet 3 Mini 5+ FIRMWARE_VERSION: 3.5.0-beta.4 ELECTRONICS: Duet 3 Mini5plus Ethernet FIRMWARE_DATE: 2023-06-08 23:40:14
; Configuration file for Duet 3 Mini 5+ (firmware version 3.3)
; executed by the firmware on start-up
;
; generated by RepRapFirmware Configuration Tool v3.3.16 on Wed Dec 13 2023 21:57:46 GMT+0100 (Midden-Europese standaardtijd)
; General preferences
M575 P1 S1 B57600 ; enable support for PanelDue
G90 ; send absolute coordinates...
M83 ; ...but relative extruder moves
M550 P"Ender 5 Plus" ; set printer name
; Network
M552 P192.168.178.96 S1 ; enable network and set IP address
M553 P255.255.255.0 ; set netmask
M554 P192.168.178.1 ; set gateway
M586 P0 S1 ; enable HTTP
M586 P1 S0 ; disable FTP
M586 P2 S0 ; disable Telnet
; Drives
M569 P0.0 S0 ; physical drive 0.0 goes backwards
M569 P0.1 S0 ; physical drive 0.1 goes backwards
M569 P0.2 S0 ; physical drive 0.2 goes backwards (Z Axis Left)
M569 P0.3 S0 ; physical drive 0.3 goes backwards
M569 P0.4 S0 ; physical drive 0.4 goes backwards (Z Axis Right)
M584 X0.0 Y0.1 Z0.2:0.4 E0.3 ; set drive mapping
M350 X16 Y16 Z16 E16 I1 ; configure microstepping with interpolation
M92 X80.00 Y80.00 Z800.00 E394.26 ; set steps per mm
M566 X900.00 Y900.00 Z60.00 E120.00 ; set maximum instantaneous speed changes (mm/min)
M203 X6000.00 Y6000.00 Z180.00 E1200.00 ; set maximum speeds (mm/min)
M201 X500.00 Y500.00 Z20.00 E500.00 ; set accelerations (mm/s^2)
M906 X800 Y800 Z800 E800 I30 ; set motor currents (mA) and motor idle factor in per cent
M84 S30 ; Set idle timeout
; Axis Limits
M208 X0 Y0 Z0 S1 ; set axis minima
M208 X350 Y335 Z400 S0 ; set axis maxima
; Endstops
M574 X2 S1 P"!io5.in" ; configure switch-type (e.g. microswitch) endstop for high end on X via pin !io5.in
M574 Y2 S1 P"!io6.in" ; configure switch-type (e.g. microswitch) endstop for high end on Y via pin !io6.in
M574 Z1 S2 ; configure Z-probe endstop for low end on Z
; Z-Probe
M950 S0 C"io3.out" ; create servo pin 0 for BLTouch
M558 P9 C"io3.in" H2 F120 T6000 ; set Z probe type to bltouch and the dive height + speeds
G31 P500 X-33 Y-5 Z3.768 ; set Z probe trigger value, offset and trigger height
M557 X25:315 Y40:310 S19.3:18 ; define mesh grid
; Bed adjustment screw locations
M671 X-33:383 Y166:166 S8 ;Z pivot points are at Left(-33,166) and Right(383,166)
; Heaters
M308 S0 P"temp0" Y"thermistor" T98801 B4185 ; configure sensor 0 as thermistor on pin temp0
M950 H0 C"out0" T0 ; create bed heater output on out0 and map it to sensor 0
M307 H0 B0 S1.00 ; Disable bang-bang mode for the bed heater and set PWM limit
M140 H0 ; map heated bed to heater 0
M143 H0 S120 ; set temperature limit for heater 0 to 120C
M308 S1 P"temp1" Y"thermistor" T100000 B4725 C7.06e-8 ; configure sensor 1 as thermistor on pin temp1
M950 H1 C"out1" T1 ; create nozzle heater output on out1 and map it to sensor 1
M307 H1 B0 S1.00 ; disable bang-bang mode for heater and set PWM limit
M143 H1 S285 ; set temperature limit for heater 1 to 285C
; Extruder Fan
M950 F1 C"out3" Q500 ; create fan 1 on pin out3 and set its frequency
M106 P1 C"Extruder" S1 H1 T60 ; set fan 1 name and value. Thermostatic control is turned on
; Part Fan
M950 F0 C"out4" Q100 ; create fan 0 on pin out4 and set its frequency
M106 P0 C"Part" S0 H-1 ; set fan 0 name and value. Thermostatic control is turned off
; Tools
M563 P0 D0 H1 F0 ; define tool 0
G10 P0 X0 Y0 Z0 ; set tool 0 axis offsets
G10 P0 R0 S0 ; set initial tool 0 active and standby temperatures to 0C
; Input Shaping accelerometer
M955 P0 C"spi.cs2+spi.cs1" I14 Q500000 ; Oriantation 14(+X to -X) all wires connected to temp DB connector, no temperature daughterboard
; Custom settings are not defined
; Miscellaneous
M501 ; load saved parameters from non-volatile memory
Ive fixed my problems, i also took in account that my head has a offset for x and y so put that also in.
So in config:
; Bed adjustment screw locations
M671 X-33:383 Y166:166 S5 ;Z pivot points are at Left(-33,166) and Right(383,166)
And in bed.g
bed.g
; called to perform automatic bed compensation via G32
;
; generated by RepRapFirmware Configuration Tool v3.3.16 on Tue Aug 08 2023 14:15:35 GMT+0200 (Central European Summer Time)
M561 ; clear any bed transform
G28 ; Home
while true
G30 P0 X25 Y166 Z-99999 ; probe near a leadscrew, half way along Y axis
G30 P1 X315 Y166 Z-99999 S2 ; probe near a leadscrew and calibrate 2 motors
if abs(move.calibration.initial.deviation) < 0.01 || iterations > 5
break
; set the Z=0 datum which may have changed due to bed leveling
; step 1 - move probe to center of bed
G1 X{175-sensors.probes[0].offsets[0]}, Y{166-sensors.probes[0].offsets[1]}, F6000
; step 2 - do single probe which sets Z to trigger height of Z probe
G30
But i do have now the "problem" that when i hit te macro of true bed leveling in de online interface it keeps on running and never settles with values. ive have it kept running for 30 min.
16-1-2024 10:02:42 Leadscrew adjustments made: -0.000 0.003, points used 2, (mean, deviation) before (0.001, 0.001) after (0.000, 0.000)
16-1-2024 10:02:32 Leadscrew adjustments made: 0.003 -0.000, points used 2, (mean, deviation) before (0.001, 0.001) after (0.000, 0.000)
16-1-2024 10:02:21 Leadscrew adjustments made: -0.003 -0.001, points used 2, (mean, deviation) before (-0.002, 0.001) after (-0.000, 0.000)
16-1-2024 10:02:11 Leadscrew adjustments made: 0.000 0.000, points used 2, (mean, deviation) before (0.000, 0.000) after (-0.000, 0.000)
16-1-2024 10:02:00 Leadscrew adjustments made: 0.001 0.001, points used 2, (mean, deviation) before (0.001, 0.000) after (0.000, 0.000)
16-1-2024 10:01:50 Leadscrew adjustments made: 0.004 -0.003, points used 2, (mean, deviation) before (0.000, 0.003) after (-0.000, 0.000)
16-1-2024 10:01:39 Leadscrew adjustments made: -0.004 -0.002, points used 2, (mean, deviation) before (-0.003, 0.001) after (-0.000, 0.000)
16-1-2024 10:01:29 Leadscrew adjustments made: 0.002 -0.000, points used 2, (mean, deviation) before (0.001, 0.001) after (-0.000, 0.000)
16-1-2024 10:01:18 Leadscrew adjustments made: 0.004 0.004, points used 2, (mean, deviation) before (0.004, 0.000) after (0.000, 0.000)
16-1-2024 10:01:08 Leadscrew adjustments made: -0.001 -0.001, points used 2, (mean, deviation) before (-0.001, 0.000) after (-0.000, 0.000)
16-1-2024 10:00:57 Leadscrew adjustments made: -0.001 -0.003, points used 2, (mean, deviation) before (-0.002, 0.001) after (0.000, 0.000)
16-1-2024 10:00:47 Leadscrew adjustments made: -0.002 0.002, points used 2, (mean, deviation) before (0.000, 0.001) after (0.000, 0.000)
16-1-2024 10:00:37 Leadscrew adjustments made: -0.003 0.010, points used 2, (mean, deviation) before (0.003, 0.004) after (0.000, 0.000)
16-1-2024 10:00:26 Leadscrew adjustments made: 0.007 -0.007, points used 2, (mean, deviation) before (0.000, 0.005) after (-0.000, 0.000)
16-1-2024 10:00:16 Leadscrew adjustments made: 0.002 -0.000, points used 2, (mean, deviation) before (0.001, 0.001) after (-0.000, 0.000)
16-1-2024 10:00:05 Leadscrew adjustments made: 0.002 -0.003, points used 2, (mean, deviation) before (-0.000, 0.002) after (-0.000, 0.000)
16-1-2024 09:59:55 Leadscrew adjustments made: -0.003 0.002, points used 2, (mean, deviation) before (-0.000, 0.002) after (0.000, 0.000)
16-1-2024 09:59:44 Leadscrew adjustments made: 0.055 0.054, points used 2, (mean, deviation) before (0.055, 0.001) after (0.000, 0.000)
16-1-2024 09:59:28 G32
Leadscrew adjustments made: -4.730 -4.739, points used 2, (mean, deviation) before (-4.734, 0.003) after (-0.000, 0.000)
Any pointers for that or should i open a new topic? There isn't much interaction here unfortunately.
@droftarts Thx, that was it. Don't know how i could mis it, ive re-read it 20 times..
And will we are at it, my bed mesh is:
; Axis Limits
M208 X0 Y0 Z0 S1 ; set axis minima
M208 X350 Y335 Z400 S0 ; set axis maxima
Does it make sense then that i use the coordinates grater then my bed for the axes? They are around there, but on the first run it tried to run out to more then x350 (i assume to the righter coordinate of the z screw)
; Bed adjustment screw locations
M671 X-35:385 Y164:164 S0.5 ;Z pivot points are at Left(-35,164) and Right(385,164)
So could you perhaps also check my bed/homey-all configs? because i think ive have something wrong there also.
First i get this:
5-1-2024 16:21:38 Error: Some computed corrections exceed configured limit of 0.50mm: 0.173 -1.062
5-1-2024 16:21:27 Error: Some computed corrections exceed configured limit of 0.50mm: 0.173 -1.063
and then i changed in the config from 0.5 to 2mm and even untill 4 but then its getting this
5-1-2024 16:36:20 G28
Error: Some computed corrections exceed configured limit of 4.00mm: -5.657 -5.584
Thx for helping a amateur out.
FYI, bed was manually leveled before and was printer first layers good.
Hello,
Im trying to convert from 2 motors 1 stepper to 2 motors 2 steppers for the Z axes.
The 2 stepper motors where spliced from 2 to 1 cable to stepper (2)
Ive bought 2 cables to go from each motor to there own stepper (2 and 4)
Ive configured in the config file ;
; Drives
M569 P0.0 S0 ; physical drive 0.0 goes backwards
M569 P0.1 S0 ; physical drive 0.1 goes backwards
M569 P0.2 S0 ; physical drive 0.2 goes backwards (Z Axis Left)
M569 P0.3 S0 ; physical drive 0.3 goes backwards
M569 P0.4 S0 ; physical drive 0.4 goes backwards (Z Axis Right)
M584 X0.0 Y0.1 Z0.2:Z0.4 E0.3 ; set drive mapping
M350 X16 Y16 Z16:Z16 E16 I1 ; configure microstepping with interpolation
M92 X80.00 Y80.00 Z800.00:800.00 E394.26 ; set steps per mm
M566 X900.00 Y900.00 Z60.00:60.00 E120.00 ; set maximum instantaneous speed changes (mm/min)
M203 X6000.00 Y6000.00 Z180.00:180:00 E1200.00 ; set maximum speeds (mm/min)
M201 X500.00 Y500.00 Z20.00:20.00 E500.00 ; set accelerations (mm/s^2)
M906 X800 Y800 Z800:800 E800 I30 ; set motor currents (mA) and motor idle factor in per cent
M84 S30 ; Set idle timeout
But only 1 motor works when homing, what i tried;
M122
=== Diagnostics ===
RepRapFirmware for Duet 3 Mini 5+ version 3.5.0-beta.4 (2023-06-08 23:40:14) running on Duet 3 Mini5plus Ethernet (standalone mode)
Board ID: 5QZRJ-6F6M2-G65J0-409FD-3Q81Z-72HAQ
Used output buffers: 9 of 40 (24 max)
Error in macro line 26 while starting up: in file macro line 26 column 21: M584: expected number after ':'
=== RTOS ===
Static ram: 102996
Dynamic ram: 116808 of which 216 recycled
Never used RAM 19180, free system stack 196 words
Tasks: NETWORK(1,ready,26.2%,164) ETHERNET(5,nWait,0.1%,569) HEAT(3,nWait,0.0%,327) Move(4,nWait,0.0%,358) CanReceiv(6,nWait,0.0%,939) CanSender(5,nWait,0.0%,337) CanClock(7,delaying,0.0%,342) TMC(4,nWait,0.6%,108) MAIN(1,running,72.2%,662) IDLE(0,ready,0.0%,29) AIN(4,delaying,0.8%,266), total 100.0%
Owned mutexes:
=== Platform ===
Last reset 00:29:46 ago, cause: software
Last software reset at 2024-01-05 12:33, reason: User, Gcodes spinning, available RAM 19108, slot 2
Software reset code 0x0003 HFSR 0x00000000 CFSR 0x00000000 ICSR 0x00000000 BFAR 0xe000ed38 SP 0x00000000 Task MAIN Freestk 0 n/a
Error status: 0x00
Aux0 errors 0,0,0
MCU revision 0, ADC conversions started 1786875, completed 1786875, timed out 0, errs 0
MCU temperature: min 32.2, current 35.9, max 36.1
Supply voltage: min 24.1, current 24.2, max 24.2, under voltage events: 0, over voltage events: 0, power good: yes
Heap OK, handles allocated/used 99/2, heap memory allocated/used/recyclable 2048/76/0, gc cycles 0
Events: 0 queued, 0 completed
Driver 0: standstill, SG min 0, read errors 0, write errors 1, ifcnt 24, reads 28485, writes 10, timeouts 0, DMA errors 0, CC errors 0
Driver 1: standstill, SG min 0, read errors 0, write errors 1, ifcnt 24, reads 28485, writes 10, timeouts 0, DMA errors 0, CC errors 0
Driver 2: standstill, SG min 0, read errors 0, write errors 1, ifcnt 24, reads 28485, writes 10, timeouts 0, DMA errors 0, CC errors 0
Driver 3: standstill, SG min 0, read errors 0, write errors 1, ifcnt 21, reads 28484, writes 10, timeouts 0, DMA errors 0, CC errors 0
Driver 4: standstill, SG min 0, read errors 0, write errors 1, ifcnt 21, reads 28485, writes 10, timeouts 0, DMA errors 0, CC errors 0
Driver 5: not present
Driver 6: not present
Date/time: 2024-01-05 13:03:22
Cache data hit count 3029834385
Slowest loop: 23.15ms; fastest: 0.16ms
=== Storage ===
Free file entries: 20
SD card 0 detected, interface speed: 22.5MBytes/sec
SD card longest read time 4.0ms, write time 0.0ms, max retries 0
=== Move ===
DMs created 83, segments created 0, maxWait 0ms, bed compensation in use: none, height map offset 0.000, ebfmin 0.00, ebfmax 0.00
no step interrupt scheduled
=== DDARing 0 ===
Scheduled moves 0, completed 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1
=== DDARing 1 ===
Scheduled moves 0, completed 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1
=== Heat ===
Bed heaters 0 -1 -1 -1, chamber heaters -1 -1 -1 -1, ordering errs 0
=== GCodes ===
Movement locks held by null, null
HTTP is idle in state(s) 0
Telnet is idle in state(s) 0
File is idle in state(s) 0
USB is idle in state(s) 0
Aux is idle in state(s) 0
Trigger is idle in state(s) 0
Queue is idle in state(s) 0
LCD is idle in state(s) 0
SBC is idle in state(s) 0
Daemon is idle in state(s) 0
Aux2 is idle in state(s) 0
Autopause is idle in state(s) 0
File2 is idle in state(s) 0
Queue2 is idle in state(s) 0
Q0 segments left 0, axes/extruders owned 0x0000000
Code queue 0 is empty
Q1 segments left 0, axes/extruders owned 0x0000000
Code queue 1 is empty
=== CAN ===
Messages queued 16081, received 0, lost 0, boc 0
Longest wait 0ms for reply type 0, peak Tx sync delay 0, free buffers 18 (min 18), ts 8935/0/0
Tx timeouts 0,0,8934,0,0,7145 last cancelled message type 30 dest 127
=== Network ===
Slowest loop: 20.37ms; fastest: 0.03ms
Responder states: MQTT(0) HTTP(0) HTTP(0) HTTP(0) HTTP(0) FTP(0) Telnet(0)
HTTP sessions: 1 of 8
= Ethernet =
Interface state: active
Error counts: 0 0 0 0 0 0
Socket states: 5 2 2 2 2 0 0 0
I think stepper 4 isnt working? Or isn't configured correctly? Am i missing something like a jumper or a config file setting? (ill upload my configs)
And how can i test if my 4th stepper driver is working yes or no? (ive think ive tested/proved that both cables and motors are working).
I fixed it, i changed the motor direction to S0 instead of S1 for x and y and now its all good, with the changes for the high end stops.
Thx! - Solved.
Ive did the changes, X went good, but the Y goes now to the front side(but there is no switch). i'm wondering why that it. It would be weird if the X would be X2 and the Y would be a Y1 right?
Am i looking at this wrong? Upper right corner should be X350-Y-320 and the xyz absolute cordinate would be at the front left corner(Diagonal oppisite of the X-Y end switched "top right corner"
Ive uploaded the new files.
(Is there a way that i can test/verify that my x and y motor are going the rightway-are connected proparly? So X350 is upper right, so when i go -x 5 it should go X345?
Hello Ian, thanks for the reply. I'll look in to it, but i bought it like this. Can i download the json file from the duet web-interface on the same place as where i can download/edit the configs? Im currently at work, but i will check it later.
Otherwise ill go for option 2 and look in to the topic you said and see if i can figure it out.