DWC Randomly terminate print at start
-
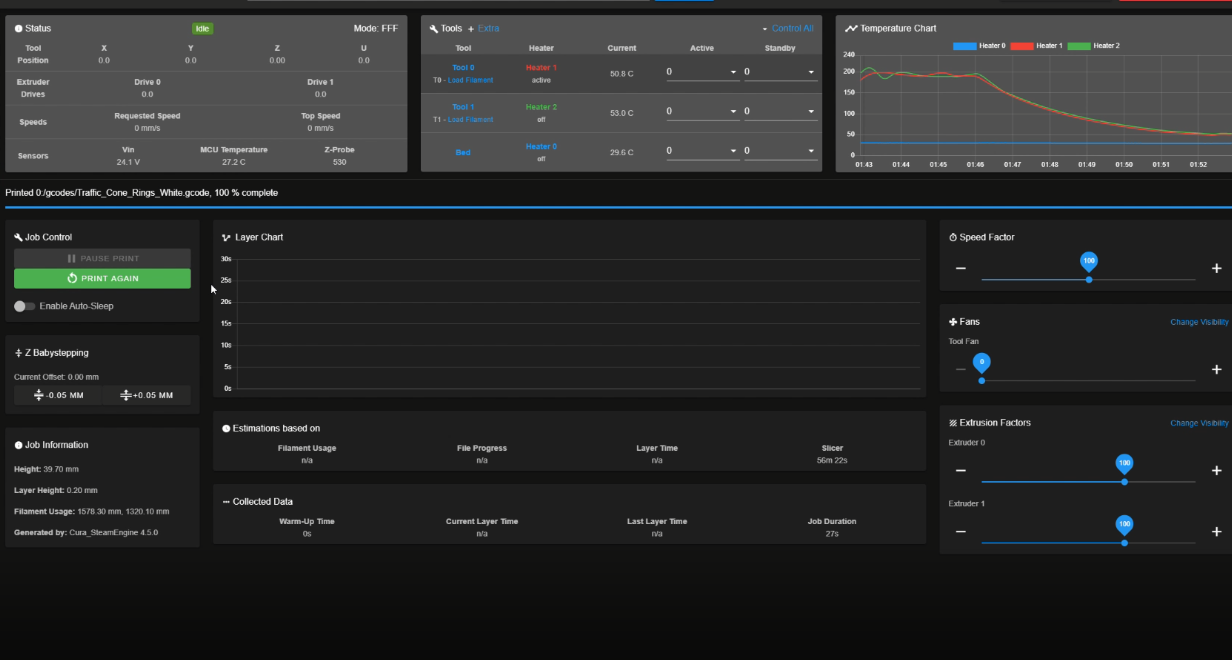
I have been having this issue for many times now. It seemed like whenever I start a print. There are some chances that it will instantly terminate the job. Only after a few tries the job then proceed. Are there some settings that I configured incorrectly that lead to this issue?
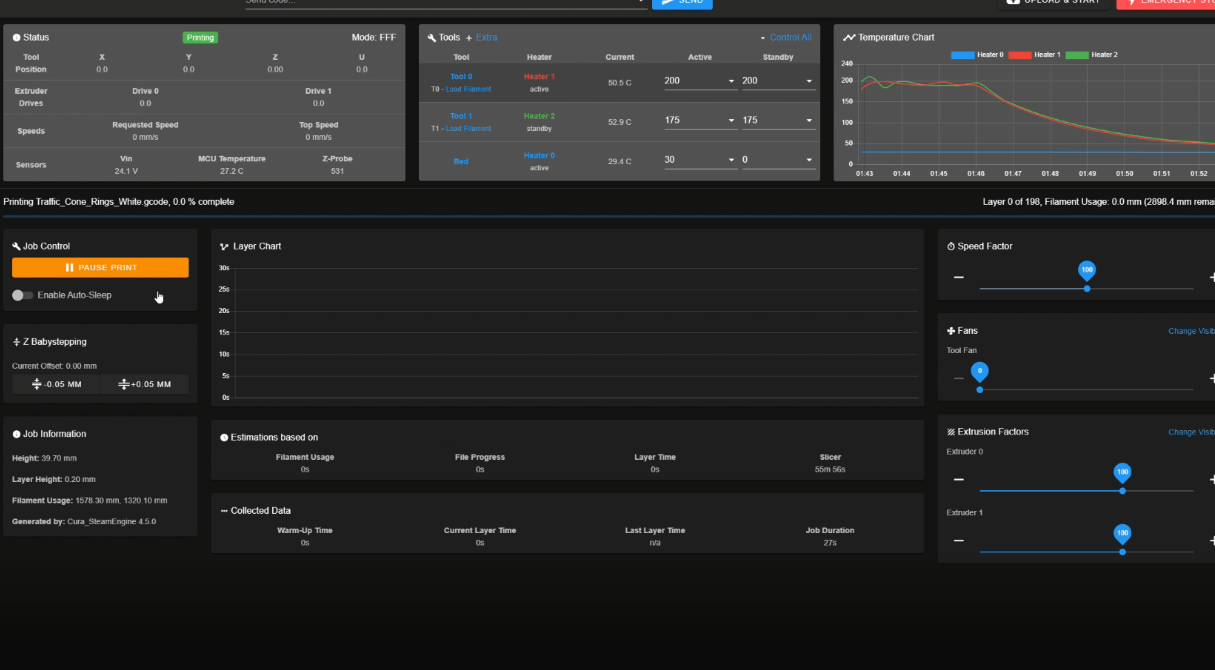
After only few seconds, it automatically terminated the job without any messages and error
-
I don't know if this is related to your problem but your temperature graphs show substantial variance and that might cause a shutdown.
Have you run tuning on heaters one and two?
Does the shut-down coincide with the start of a cooling fan ? -
Does any message show in the gcode console?
The temp swings could indicate a thermal shutdown.
Firmware versions?
-
Nope, nothing in console either. I think it is somewhat related to the heater. I sometimes got heating fault on the bed.
-
Have you PID tuned the heaters?
If you send M98 Pconfig.g in the console, do you get any error messages?
-
@Phaedrux
I get 3 warnings:Warning: heater 0 appears to be over-powered. If left on at full power, its temperature is predicted to reach 365C. Warning: heater 1 appears to be over-powered. If left on at full power, its temperature is predicted to reach 599C. Warning: heater 2 appears to be over-powered. If left on at full power, its temperature is predicted to reach 599C.Also, when I switch to bang-bang mode for the bed, it throws a heater fault in a couple of seconds. Even if I use M570 S999999 to basically disable the heater fault check.
I am using a 12v bed with an additional power supply and when I do the auto-tune, the reported voltage is the system voltage of 24v. I wonder if that is a bug or something. -
@Ray11 said in DWC Randomly terminate print at start:
I am using a 12v bed with an additional power supply and when I do the auto-tune, the reported voltage is the system voltage of 24v. I wonder if that is a bug or something.
That's interesting. How do you have it all wired up? I wonder if the Duet is assuming you're using vin. Not sure how it would know...
You should be using PID tuning for all heaters. Bang-bang is rarely appropriate.
-
Can you also send M122 after a print has failed and post the response.
Also post your config.g and config-override.g please.
-
@Phaedrux
Thank you so much for helping me with this!
Here is the M122 result after print was instantly terminated:M122 === Diagnostics === RepRapFirmware for Duet 3 MB6HC version 3.01-RC5 running on Duet 3 MB6HC v0.6 or 1.0 Board ID: 08DJM-956L2-G43S4-6J1D6-3SD6R-KU5GF Used output buffers: 2 of 40 (7 max) === RTOS === Static ram: 154084 Dynamic ram: 161400 of which 44 recycled Exception stack ram used: 216 Never used ram: 77472 Tasks: NETWORK(ready,1108) ETHERNET(blocked,444) HEAT(blocked,1196) CanReceiv(suspended,3820) CanSender(suspended,1488) CanClock(blocked,1468) TMC(blocked,216) MAIN(running,4388) IDLE(ready,80) Owned mutexes: === Platform === Last reset 00:00:16 ago, cause: power up Last software reset time unknown, reason: User, spinning module GCodes, available RAM 77276 bytes (slot 1) Software reset code 0x0003 HFSR 0x00000000 CFSR 0x00000000 ICSR 0x0444a000 BFAR 0x00000000 SP 0xffffffff Task 0x4e49414d Error status: 0 Free file entries: 10 SD card 0 detected, interface speed: 25.0MBytes/sec SD card longest block write time: 0.0ms, max retries 0 MCU temperature: min 25.8, current 27.4, max 27.5 Supply voltage: min 24.1, current 24.1, max 24.2, under voltage events: 0, over voltage events: 0, power good: yes 12V rail voltage: min 12.1, current 12.2, max 12.2, under voltage events: 0 Driver 0: standstill, reads 15368, writes 16 timeouts 0, SG min/max 0/0 Driver 1: standstill, reads 15369, writes 16 timeouts 0, SG min/max 0/0 Driver 2: standstill, reads 15369, writes 16 timeouts 0, SG min/max 0/0 Driver 3: standstill, reads 15371, writes 15 timeouts 0, SG min/max 0/0 Driver 4: standstill, reads 15371, writes 15 timeouts 0, SG min/max 0/0 Driver 5: standstill, reads 15372, writes 15 timeouts 0, SG min/max 0/0 Date/time: 1970-01-01 00:00:00 Slowest loop: 4.12ms; fastest: 0.15ms === Move === Hiccups: 0(0), FreeDm: 375, MinFreeDm: 375, MaxWait: 0ms Bed compensation in use: none, comp offset 0.000 === MainDDARing === Scheduled moves: 0, completed moves: 0, StepErrors: 0, LaErrors: 0, Underruns: 0, 0 CDDA state: -1 === AuxDDARing === Scheduled moves: 0, completed moves: 0, StepErrors: 0, LaErrors: 0, Underruns: 0, 0 CDDA state: -1 === Heat === Bed heaters = 0 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1, chamberHeaters = -1 -1 -1 -1 Heater 1 is on, I-accum = 0.0 === GCodes === Segments left: 0 Movement lock held by null HTTP is idle in state(s) 0 Telnet is idle in state(s) 0 File is idle in state(s) 0 USB is idle in state(s) 0 Aux is idle in state(s) 0 Trigger is idle in state(s) 0 Queue is idle in state(s) 0 LCD is idle in state(s) 0 SBC is idle in state(s) 0 Daemon is idle in state(s) 0 Autopause is idle in state(s) 0 Code queue is empty. === Network === Slowest loop: 3.10ms; fastest: 0.03ms Responder states: HTTP(0) HTTP(0) HTTP(0) HTTP(0) HTTP(0) HTTP(0) FTP(0) Telnet(0) Telnet(0) HTTP sessions: 1 of 8 - Ethernet - State: active Error counts: 0 0 0 0 0 Socket states: 5 2 2 2 2 0 0 0 === CAN === Messages sent 65, longest wait 0ms for type 0 === Linux interface === State: 0, failed transfers: 0 Last transfer: 16683ms ago RX/TX seq numbers: 0/1 SPI underruns 0, overruns 0 Number of disconnects: 0 Buffer RX/TX: 0/0-0And here is my config.g
; Configuration file for Duet 3 (firmware version 3) ; executed by the firmware on start-up ; ; generated by RepRapFirmware Configuration Tool v2.1.8 on Wed Apr 01 2020 22:14:44 GMT-0500 (Central Daylight Time) ; General preferences G90 ; send absolute coordinates... M83 ; ...but relative extruder moves M550 P"INAZUMA-IDEX" ; set printer name ; Network M552 P0.0.0.0 S1 ; enable network and acquire dynamic address via DHCP M586 P0 S1 ; enable HTTP M586 P1 S0 ; disable FTP M586 P2 S0 ; disable Telnet ; Drives M569 P0.0 S0 D3 ; physical drive 0.0 goes forwards M569 P0.1 S0 D3 ; physical drive 0.0 goes forwards M569 P0.2 S0 D3 ; physical drive 0.2 goes forwards M569 P0.3 S1 D3 ; physical drive 0.3 goes forwards M569 P0.4 S0 D3 ; physical drive 0.4 goes forwards M569 P0.5 S0 D3 ; physical drive 0.5 goes forwards M584 X0.0 U0.1 Y0.2 Z0.3 E0.4:0.5 ; set drive mapping M350 X16 U16 Y16 Z16 E16:16 I1 ; configure microstepping with interpolation M92 X100.00 U100.00 Y80.00 Z1600.00 E410.00:430.00 ; set steps per mm M566 X900.00 U900.00 Y900.00 Z12.00 E120.00:120.00 ; set maximum instantaneous speed changes (mm/min) M203 X6000.00 U6000.00 Y6000.00 Z1000.00 E1200.00:1200.00 ; set maximum speeds (mm/min) M201 X500.00 U500.00 Y500.00 Z20.00 E250.00:250.00 ; set accelerations (mm/s^2) M906 X700 U700 Y800 Z600 E800:800 I30 ; set motor currents (mA) and motor idle factor in per cent M84 S30 ; Set idle timeout ; Axis Limits M208 X-30 U26 Y0 Z0 S1 ; set axis minima M208 X260 U316 Y190 Z200 S0 ; set axis maxima ; Endstops M574 X1 S3 ; configure sensorless endstop for low end on X M574 U1 S3 M574 Y1 S3 ; configure sensorless endstop for low end on Y M574 Z1 S2 ; configure sensorless endstop for low end on Z M915 X U Y S2 R1 ; Z-Probe M558 P1 I0 C"io3.in" H3 F2000 T6000 ; set Z probe type to switch and the dive height + speeds G31 P580 X0 Y0 Z0 ; set Z probe trigger value, offset and trigger height ;G31 P{sensors.probes[0].value[0] + 30} ;G31 X0 Y0 Z0 M557 X60:270 Y15:195 S60 ; define mesh grid ; Heaters M570 S99999 M308 S0 P"temp0" Y"thermistor" T100000 B4138 ; configure sensor 0 as thermistor on pin temp0 M950 H0 C"out0" T0 ; create bed heater output on out0 and map it to sensor 0 M143 H0 S80 ; set temperature limit for heater 0 to 120C M307 H0 B0 S1.00 V11.0 ; enable bang-bang mode for the bed heater and set PWM limit M307 H0 A84.5 C473.8 D1.4 M140 H0 ; map heated bed to heater 0 M308 S1 P"temp1" Y"thermistor" T100000 B4138 ; configure sensor 1 as thermistor on pin temp1 M950 H1 C"out1" T1 ; create nozzle heater output on out1 and map it to sensor 1 M143 H1 S240 ; set temperature limit for heater 1 to 240C M307 H1 B0 S1.00 ; disable bang-bang mode for heater and set PWM limit M307 H1 A574.5 C154.9 D8.5 V24.0 M308 S2 P"temp2" Y"thermistor" T100000 B4138 ; configure sensor 2 as thermistor on pin temp2 M950 H2 C"out2" T2 ; create nozzle heater output on out2 and map it to sensor 2 M143 H2 S240 ; set temperature limit for heater 2 to 240C M307 H2 B0 S1.00 ; disable bang-bang mode for heater and set PWM limit M307 H2 A574.5 C154.9 D8.5 V24.0 ; Fans M950 F0 C"out7" Q500 ; create fan 0 on pin out4 and set its frequency M106 P0 L1.0 S0 H1 T60 ; set fan 0 value. Thermostatic control is turned on M950 F1 C"out8" Q500 ; create fan 1 on pin out5 and set its frequency M106 P1 S0 H-1 ; set fan 1 value. Thermostatic control is turned off M950 F2 C"out4" Q500 ; create fan 2 on pin out7 and set its frequency M106 P2 L1.0 S0 H2 T60 ; set fan 2 value. Thermostatic control is turned on M950 F3 C"out9" Q500 ; create fan 3 on pin out6 and set its frequency M106 P3 S0 H-1 ; set fan 3 value. Thermostatic control is turned off ; Tools M563 P0 D0 H1 F0:1 ; define tool 0 G10 P0 X0 Y0 Z0 ; set tool 0 axis offsets G10 P0 R0 S0 ; set initial tool 0 active and standby temperatures to 0C M563 P1 D1 H2 X3 F0:3 ; define tool 1 G10 P1 U0.25 Y-1.8 Z-0.6 ; set tool 1 axis offsets G10 P1 R0 S0 ; set initial tool 1 active and standby temperatures to 0C ; Custom settings are not defined T0 -
@Phaedrux
Later, I did some experiments. It seemed like that whenever the actual bed temperature closed up with the target temperature within 0.5 degC, the print just terminate itself without any warnings. -
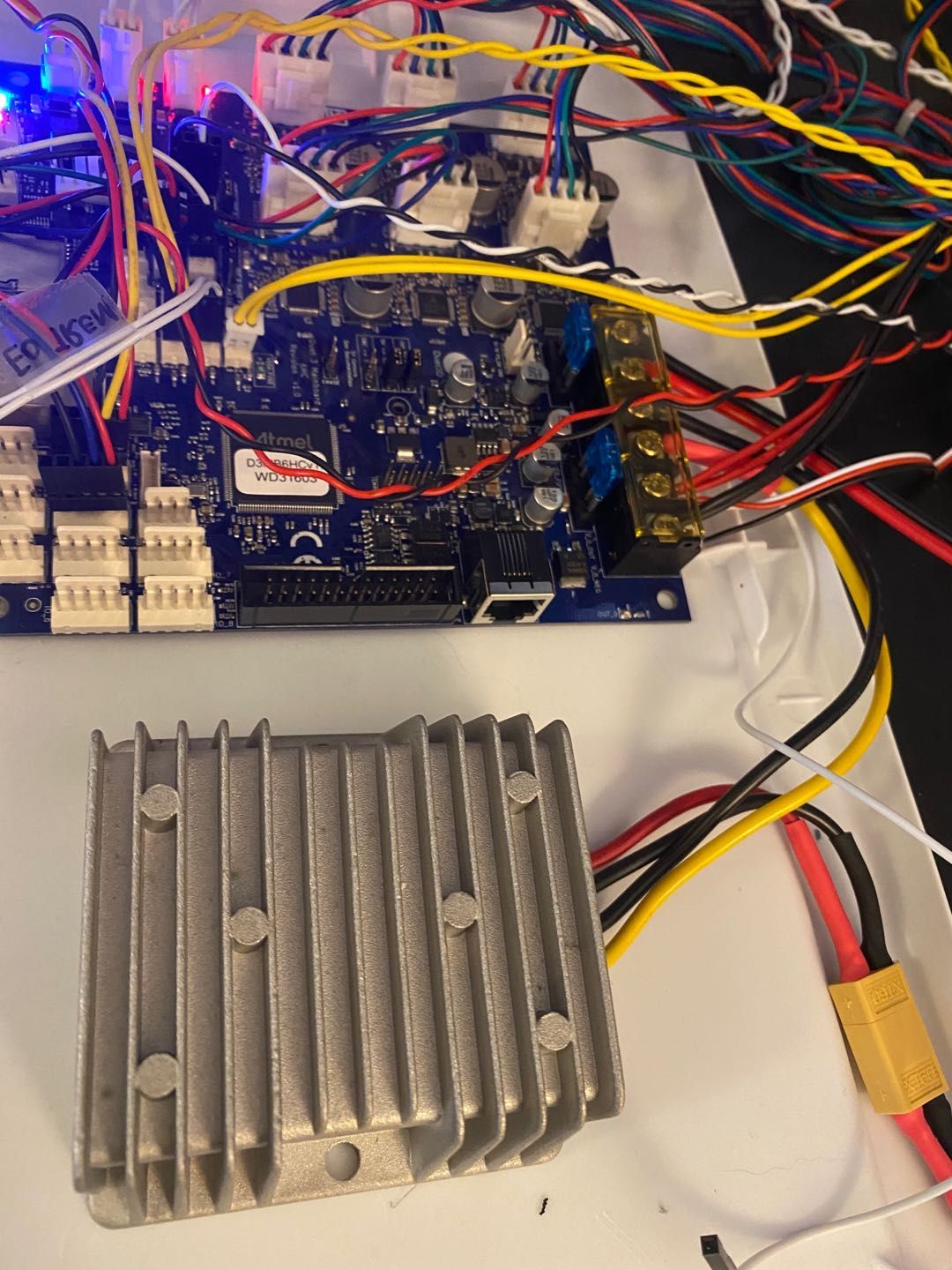
Can you post a photo of how you have the bed wired?
-
@Phaedrux
Sorry for the wiring mess, I am still in the process of testing my printer.
What I did is I wired a 24 to 12v converter with my power supply and input the 12v into the out_0_power_in. The bed is connected to out_0.
-
I have this exact thing happen to me all the time.
I haven't been able to track down exactly why it happens, but for me it seems to revolve around the .gcode file name.
I know for sure that certain special characters seems to mess with it (things like $, %, etc.)
It seems that length of the filename is a factor (shorter is better.)
And it seems that if you are putting files into sub-folders the problem is exacerbated.
I've had some files print just fine the first time (right after I upload it), but then when I go to re-print, it does this. And without changing anything, just deleting and re-uploading it will work again. This has only happened with files I've put into sub-folders. I ultimately fixed this behavior by severely shortening the name of the file.I have this using DWC 1.22.6 on a Duet Maestro running firmware v2.03, and remember versions of this behavior as far back as 1.19 on a Duet 2 WiFi and Duet 2 Ethernet (when I first started using Duet boards)
I would try deleting the file, renaming it to something very short and simple, and uploading again.
Hope this helps. -
@SneakyTiki said in DWC Randomly terminate print at start:
I have this using DWC 1.22.6 on a Duet Maestro running firmware v2.03, and remember versions of this behavior as far back as 1.19 on a Duet 2 WiFi and Duet 2 Ethernet (when I first started using Duet boards)
I'd have to go reread all the releases notes to be sure but I think some of this was resolved since then. Have you tried recently with DWC 2 and RRF 2.05?
-
@SneakyTiki I recently updated to DWC 2.1.0 and beside the instant termination problem, the manual extrusion also seemed not working even if I heated the hotend up already. I mean I did write some macros to get around this but I wonder if this is a problem related to printers with multiple nozzles?
-
@Ray11 I believe that was fixed with DWC 2.1.1
-
@Phaedrux said in DWC Randomly terminate print at start:
Have you tried recently with DWC 2 and RRF 2.05?
I have not, but thanks for letting me know. I'll check it out at some point when I can afford some down-time
")