Stall detection with 2 motors
-
@Phaedrux
I understand trying to stall multiple motors at the same time is problematic but it's work on my other printer (nema23) and on my X axis on this one.
The only differences on this printer (nema17) with the 2 motors of X are the 2 motors of Y turn in opposate direction and are slightly stronger. -
You're missing an H value from your M915. Did you calculate it?
@noisettetbou said in Stall detection with 2 motors:
M574 X1 S3 ; configure sensorless endstop for low end on X
M574 Y1 S3 ; configure sensorless endstop for low end on YYou say you're using 3.1.1 but your config is using syntax for RRF2.
Please send M115 and confirm what firmware you're actually using.
-
@Phaedrux
09/09/2020 à 21:53:09 M115
FIRMWARE_NAME: RepRapFirmware for Duet 2 WiFi/Ethernet FIRMWARE_VERSION: 3.1.1 ELECTRONICS: Duet WiFi 1.02 or later FIRMWARE_DATE: 2020-05-19b2 -
@Phaedrux
And I've tryed M574 Y1 S4 and indicate some differents M915 H parameters but no change. Force on endstop or false detection. -
Well what behaviour do you want when a stall is detected? stop both motors or stop each individually?
https://duet3d.dozuki.com/Wiki/Gcode#Section_M574_RepRapFirmware_Num_3
New endstop type S4 means use motor stall detection (like S3) but if there are multiple motors, stop each one individually as it stalls. S3 means use motor stall detection but as in RRF 2: stop all relevant motors when the first one stalls.
What did you calculate for the H value?
Can you send M98 P"config.g" in the gcode console and report the results?
-
@Phaedrux
And I'm not sure of my calculation of the H parameter and speed. This is my Y motors (2 in series) of my Y axis specifications :
Spécification électrique
Numéro de pièce du fabricant: 17HS24-2104D
Type de moteur: Bipolar Stepper
Angle de pas: 1.8 deg
Couple de maintien: 65Ncm(92.3oz.in)
Courant/phase: 2.10A
Tension: 3.360V
Résistance/phase: 1.60ohms
Inductance: 3.00mH ± 20%(1KHz)I've found more than 1000 mm/s. It's crazy !
-
@Phaedrux said in Stall detection with 2 motors:
Well what behaviour do you want when a stall is detected? stop both motors or stop each individually?
I want to stop both motors. No choice, they're in series on the same driver.
This is the results of my M98 P"config.g" :
09/09/2020 à 22:16:49 M98 P"config.g"
HTTP is enabled on port 80
FTP is disabled
TELNET is disabled
Warning: Heater 0 appears to be over-powered. If left on at full power, its temperature is predicted to reach 365C
Warning: Heater 0 appears to be over-powered. If left on at full power, its temperature is predicted to reach 269CNote my My PID aren't done for heaters errors.
-
@noisettetbou said in Stall detection with 2 motors:
I've found more than 1000 mm/s. It's crazy !
That seems wrong based on your motor specs. My calculation gives 145mm/s
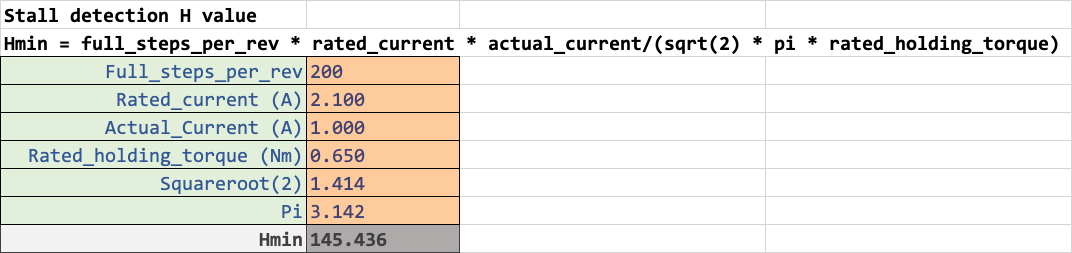
Stall detection H value Hmin = full_steps_per_rev * rated_current * actual_current/(sqrt(2) * pi * rated_holding_torque) Full_steps_per_rev 200 Rated_current (A) 2.100 Actual_Current (A) 1.000 Rated_holding_torque (Nm) 0.650 Squareroot(2) 1.414 Pi 3.142 Hmin 145.436You may be able to reduce that speed further if you reduce the motor current further. You should try reducing it as much as possible such that you still have reliable movement. Right now you're using 50%, try 30%.
-
@Phaedrux
Thanks for the calculation. I've confused the units of torque.I've tried speeds up to 300 mm/s and differents current between 20 and 100% but nothing.
-
When you say the motors rotate in opposite directions, what do you mean?
Can you post a photo of the printer?
-
@Phaedrux
That's a link to a photo of Y axis :
https://photos.app.goo.gl/oeFLBnE1iaKtcJMNA
The motors are biaxials and synchonysed by a shaft -
@noisettetbou possibly crazy talk but could you disable one stepper for homing only? As they're synchronized by a shaft you should be able to live with that.
-
@oliof
It's a good idea. I've tried and it is the same problem.
So 2 motors on same driver and the series wiring aren't the source of the problem.
I'm trying to invert drivers. -
I've tried to invert driver with X and always the problem. As if my Y motors aren't compatibles with the stall detection.
Is it possible ? Crazy, no ? -
Oh two steppers on a single driver? I can see how that will be bothersome/impossible. Maybe if you drive each motor independently ...
-
@oliof
It's no a problem if current is respected. I use two motors on same driver in X axis and no problem. And I done as you said for trying, so there is only one motor right now, and no good stall detection... -
I think an endstop switch might be in your future.
-
@Phaedrux
I think too... but I would like to understand
but I would like to understand -
Have you used the motor EMF calculator at reprapfirmware.org to verify that you have enough VIN voltage to drive 2 motors in series without loss of torque?
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
Difference between X and Y is often that Y moves more mass and there for needs better tuning. But I agree that an endstop likely will give you reliable results faster.