Duet 3 Mini 5+ sensorless homing configuration
-
The critical point in the doc on stall detection for the Duet 3 Mini is this:
Additionally, the TMC2209 stepper driver used in Duet 3 Mini 5+ (and Duet 3 Tool board TOOL1LC once stallGuard is implemented in firmware), features stallGuard 4. This is optimised for operation with stealthChop, while its predecessor stallGuard 2 (TMC5160 and TMC2260) works with spreadCycle. You will need to adjust the speed at which stealthChop changes over to spreadCycle. This is set by M569 V parameter. The default is 2000.
You will need to reduce the V parameter (at least during homing) so that at the speed of the homing move, the driver is operating in stealthChop mode. By default it is only in stealthChop mode at very low speeds, too low for homing moves. See the M569 command.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
my steppers are running in stealhchop with up to 120mm/sec, still it would not trigger
-
Confirm you are using firmware 3.2RC2 ?
What does M569 P# report, for values of # corresponding to the drivers for the axes you are trying to home?
-
@flobler
can you also with stealthchop.@dc42 i configured back, and running a print, but these are the settings that i am running all the time
30/12/2020, 20:19:44 M569 P0
Drive 0 runs forwards, active low enable, timing fast, mode stealthChop, ccr 0x00053, toff 3, tblank 0, tpwmthrs 30 (125.0 mm/sec), pwmScaleSum 222, pwmScaleAuto 27, pwmOfsAuto 64, pwmGradAuto 22, pos 584Drive 1 runs forwards, active low enable, timing fast, mode stealthChop, ccr 0x00053, toff 3, tblank 0, tpwmthrs 30 (125.0 mm/sec), pwmScaleSum 73, pwmScaleAuto 0, pwmOfsAuto 57, pwmGradAuto 19, pos 611
-
Please post your config.g file again, because the M569 commands in the one you posted earlier do not maintain stealthChop mode up to 120mm/sec.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
we've had good success with sensorless homing on the LPC port using
D3 V40after each M569 for the axis being homed.
we typically suggest runningM915 P0 S-63 H10 R1 ; Set very sensitive stall detect M574 X1 S3 ; configure endstop for stall detection G1 X200 H1 ; Should stall pretty much immediatelyto ensure that everything is working correctly. You can then tweak as required to work on your system
Owns various duet boards and is the main wiki maintainer for the Teamgloomy LPC/STM32 port of RRF. Assume I'm running whatever the latest beta/stable build is
-
@dc42 that was me who posted the config
")
I can confirm that I am running 3.2RC2. I will reduce the V parameter and try again. I will report back.
Thanks for the help!
-
@jay_s_uk said in Duet 3 Mini 5+ sensorless homing configuration:
we've had good success with sensorless homing on the LPC port using D3 V40 after each M569 for the axis being homed.
we typically suggest runningtried it again with your settings and the motors keep grinding away
-
@Veti even with setting S to -63?
If it doesn't immediately trigger that means there's something not right somewhere.
I can maybe have a go with it this morning with mine.
Will report back -
i even tried with -64
-
I can also confirm that sensorless homing does not appear to be working on the mini5+ with RC2.
-
@jay_s_uk said in Duet 3 Mini 5+ sensorless homing configuration:
I can also confirm that sensorless homing does not appear to be working on the mini5+ with RC2.
It worked for me during testing. I will try to find the configuration that I used.
-
Thanks everyone for helping @flobler , he is working on an official Bear config for the Mini 5+
-
Yeah, thanks for the help everyone, really appreciated!
I just wanted to add that I am using version 0.4 of the Mini 5+. I also tried all the above and sensorless homing did not work for me. Motor was operating in stealthChop.
-
Actually, that combo got it to stall the first time I tried homing X. It stalled immediately when trying to move.
What is weird though is that it did not work afterwards again. I need to power cycle the printer (emergency stop did not do it) for it to work again and then again it only works on the first try. This worked 5/5 times so far.
-
Bear in mind that you need to execute a tuning procedure when using stealthChop mode.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
Thanks! Just found the docs on that. Will apply and report back.
-
@dc42 I think I made progress.
I am still only trying to home X for testing purposes. Here is the config: homex.g
config.gInitially when first I power on the printer and then try to home X, it does result in a crash. But if I then press the emergency stop to end the crash and tell X to home again, X homes successfully (not elegant yet but it homes).
Homing then works until I power cycle the printer or use the emergency stop. Once I do that I am back at the start. Homing X results in a crash, then I use the emergency stop and after that I can repeatedly home X successfully until I power cycle the printer or use the emergency stop again.
I suspect this must have something to to with how I configured homex.g...
-
You need to run the stealthChop tuning procedure first. You can do this is the homing files.This is what I suggest:
- Execute a tiny move (1 or 2 microsteps) away from the homing direction.
- Pause for 100ms using G4.
- Execute a small move away from the homing direction, e.g. 10mm.
- Execute the homing move.
Don't forget to reduce current for the homing move (M913).
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42 thanks, I am not sure if I am doing this correct though. So far I am still getting quite mixed results (stalling after power cycle before home point is reached and after that only homing correctly when the extruder is within 10mm of the homing location, and then also not all the time).
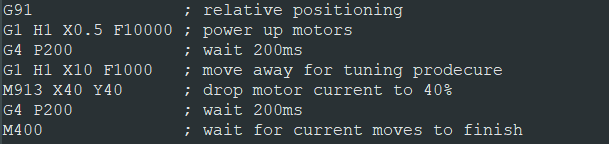
I am trying the following (again only trying X for now):
-
Set stall detection sensitivity and reduce V+H+T parameter

-
Run tuning procedure and reduce motor current
-
Homing move

-
Reset sensitivity, V+H+T and return current to 100%
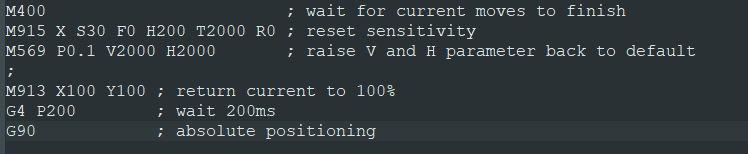
The above is all my homex.g contains... Is there still something I am doing obviously wrong?
-