Duet 3 Mini 5+ sensorless homing configuration
-
we've had good success with sensorless homing on the LPC port using
D3 V40after each M569 for the axis being homed.
we typically suggest runningM915 P0 S-63 H10 R1 ; Set very sensitive stall detect M574 X1 S3 ; configure endstop for stall detection G1 X200 H1 ; Should stall pretty much immediatelyto ensure that everything is working correctly. You can then tweak as required to work on your system
Owns various duet boards and is the main wiki maintainer for the Teamgloomy LPC/STM32 port of RRF. Assume I'm running whatever the latest beta/stable build is
-
@dc42 that was me who posted the config
")
I can confirm that I am running 3.2RC2. I will reduce the V parameter and try again. I will report back.
Thanks for the help!
-
@jay_s_uk said in Duet 3 Mini 5+ sensorless homing configuration:
we've had good success with sensorless homing on the LPC port using D3 V40 after each M569 for the axis being homed.
we typically suggest runningtried it again with your settings and the motors keep grinding away
-
@Veti even with setting S to -63?
If it doesn't immediately trigger that means there's something not right somewhere.
I can maybe have a go with it this morning with mine.
Will report back -
i even tried with -64
-
I can also confirm that sensorless homing does not appear to be working on the mini5+ with RC2.
-
@jay_s_uk said in Duet 3 Mini 5+ sensorless homing configuration:
I can also confirm that sensorless homing does not appear to be working on the mini5+ with RC2.
It worked for me during testing. I will try to find the configuration that I used.
-
Thanks everyone for helping @flobler , he is working on an official Bear config for the Mini 5+
-
Yeah, thanks for the help everyone, really appreciated!
I just wanted to add that I am using version 0.4 of the Mini 5+. I also tried all the above and sensorless homing did not work for me. Motor was operating in stealthChop.
-
Actually, that combo got it to stall the first time I tried homing X. It stalled immediately when trying to move.
What is weird though is that it did not work afterwards again. I need to power cycle the printer (emergency stop did not do it) for it to work again and then again it only works on the first try. This worked 5/5 times so far.
-
Bear in mind that you need to execute a tuning procedure when using stealthChop mode.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
Thanks! Just found the docs on that. Will apply and report back.
-
@dc42 I think I made progress.
I am still only trying to home X for testing purposes. Here is the config: homex.g
config.gInitially when first I power on the printer and then try to home X, it does result in a crash. But if I then press the emergency stop to end the crash and tell X to home again, X homes successfully (not elegant yet but it homes).
Homing then works until I power cycle the printer or use the emergency stop. Once I do that I am back at the start. Homing X results in a crash, then I use the emergency stop and after that I can repeatedly home X successfully until I power cycle the printer or use the emergency stop again.
I suspect this must have something to to with how I configured homex.g...
-
You need to run the stealthChop tuning procedure first. You can do this is the homing files.This is what I suggest:
- Execute a tiny move (1 or 2 microsteps) away from the homing direction.
- Pause for 100ms using G4.
- Execute a small move away from the homing direction, e.g. 10mm.
- Execute the homing move.
Don't forget to reduce current for the homing move (M913).
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42 thanks, I am not sure if I am doing this correct though. So far I am still getting quite mixed results (stalling after power cycle before home point is reached and after that only homing correctly when the extruder is within 10mm of the homing location, and then also not all the time).
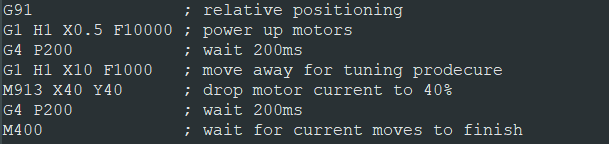
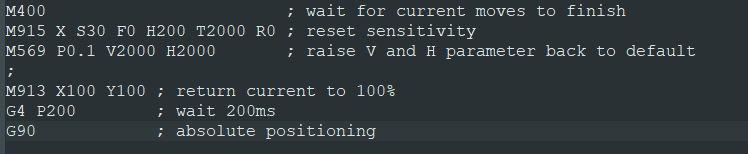
I am trying the following (again only trying X for now):
-
Set stall detection sensitivity and reduce V+H+T parameter

-
Run tuning procedure and reduce motor current
-
Homing move

-
Reset sensitivity, V+H+T and return current to 100%
The above is all my homex.g contains... Is there still something I am doing obviously wrong?
-
-
I have been running sensorless homing on my Bear using the Mini5 since it was implemented a few weeks back.
These are my settings in my config.g for the x axis
M569 P0.0 S0 D3 V100 ; physical drive 0.0 goes forwards (x) M574 X1 S3 ; configure sensorless endstop for low end on X (Sensorless)My homex.g
M400 ; wait til stuff stops M574 X1 S3 ; use stall guard for endstops M913 X60 Y60 ; drop motor currents to 50% M201 X1000 Y1000 ; reduce acceleration on X/Y to stop false triggers M915 X S0 R0 F0 H200 ; Sensitivity 4, don’t take action, don’t filter, 400steps/sec G91 ; set relative G1 H2 Z5 F1200 G1 H1 X-250 F3000 ; move left 250mm, stopping at the endstop G1 X10 F1200 ; move away from end G1 H2 Z-5 F1200 G90 ; back to absolute positioning M400 ; wait again M913 X100 Y100 ; motor currents back to 100% M201 X500 Y500 ; accel back to original M915 S63 X Y R0 ; Disable Logging and lower stall detectionFeel free to give it a shot and tweak it as needed. I have not spent a lot of time trying to fine tune it but it works well.
-
@Sindarius thank you, I will try that! Are you using Pruse MK3 LDO motors?
What part in your homex.g is covering the tuning procedure that David described above?
-
Ok, so I tried this @Sindarius. It definitely works the best it has so far, thanks for sharing!
A couple of things are not working yet though:
-
After a power cycle, when I try to home the axis, it detects a home instantly, before the actual home position and then moves away 10mm. Each homing command moves the axis therefore 10mm further away from its homing position.
-
After an emergency stop, I can get it to home correctly, that works as many times I want as long as I do not make any other moves in between and as long as I am within 10mm of the actual homing position. As soon as I move e.g. 100mm away from the homing position and I try to re-home then, I get a crash.
-
-
@flobler I am using a different set of motors for my bear build. Mine was done with some trial and error and tweaking settings I used on my Duet 2 wifi. I would only use what I have as a start point and incorporate dc42’s recommendations. Don’t trust my comments since the numbers won’t match everywhere.
-
In-cooperating all the above tips with some trial and error got it running. I simply had my current reduced way too much for it to work consistently, which was the last bit that needed adjusting.
This is configuration gives good results now homex.g
Thanks everyone for your help!