Motor doesn't move
-
@phaedrux Looks like I have similar problem as this one: https://forum.duet3d.com/topic/795/motors-will-budge-but-not-move. How to recompile the firmware for CoreXY?
-
@zfeng normally you don't have to recompile the Firmware!
What kind of Stepper Motors you are using?
Can you post your config.g file and the output of M122 (enter this in the console)Hypercube-Evolution-Hybrid, Piezo Orion, Orbiter
Duet WiFi 1.02 or later + DueX5
RepRapFirmware for Duet 2 WiFi/Ethernet 3.4.0beta4 (2021-09-27 11:30:36)
Duet WiFi Server: 1.26
Duet Web Control 3.4.0beta4 (2021-09-27) -
does the duet think that the device has been homed or have you instigated the move anyway override (Can't remember of the top of my head what that is).
-
Please post your config.g and homing files and the results of sending m122 and M98 P"config.g" in the console.
-
@siam I am using a Duet ethernet board instead, I wired the limit switches, and the motors. Now the problem is, it shows G0/G1 insufficient axes homed when I tried to move the motor.
-
@siam This is config.g code:
; Communication and general
M111 S0 ; Debug off
M550 PDuetTest ; Machine name and Netbios name (can be anything you like)
M551 Preprap ; Machine password (used for FTP)*** Ethernet networking: The following lines are used for factory testing - PLEASE REMOVE THEM
M552 P192.168.1.34 ; IP address
M554 P192.168.1.255 ; Gateway
M553 P255.255.255.0 ; Netmask;*** End of factory test lines to be removed
;*** Networking
M552 S1 ; Turn network onM555 P2 ; Set output to look like Marlin
G21 ; Work in millimetres
G90 ; Send absolute coordinates...
M83 ; ...but relative extruder moves; Axis and motor configuration
M569 P0 S1
M569 P1 S1
M569 P2 S1
M569 P3 S1
M569 P4 S1
M574 X2 Y2 Z2 S1
M564 H0M665 R105.6 L215.0 B85 H250
M666 X0 Y0 Z0
M350 X16 Y16 Z16 E16:16 I1
M92 X80 Y80 Z80
M906 X1000 Y1000 Z1000 E800 I60
M201 X1000 Y1000 Z1000 E1000
M203 X20000 Y20000 Z20000 E3600
M566 X1200 Y1200 Z1200 E1200; Thermistors
M305 P0 T100000 B3950 R4700 H30 L0
M305 P1 T100000 B3974 R4700 H30 L0
M305 P2 T100000 B3974 R4700 H30 L0M570 S180
; Adjustments for dummy heaters on test rig
M307 H0 A250 C140 D5.5 B1
M307 H1 A250 C140 D5.5 B0
M307 H2 A250 C140 D5.5 B0; Disable Fan 1 thermostatic mode
M106 P1 H-1
; Tool definitions
M563 P0 D0 H1
G10 P0 S0 R0
M563 P1 D1 H2
G10 P1 S0 R0
M92 E80:80; Z probe and compensation definition
M558 P5 F100 T6000 X0 Y0 Z0 H3
G31 P100 X0 Y0 Z-0.25M208 S1 Z-0.2
T0
;********************************************************************************
; M117 Use https://configurator.reprapfirmware.org/ to set up your printer config
;******************************************************************************** -
@siam This is M122 code:
4/14/2021, 4:35:54 PM M122
=== Diagnostics ===
RepRapFirmware for Duet 2 WiFi/Ethernet version 2.05.1 running on Duet Ethernet 1.02 or later
Board ID: 0JD0M-9P6M2-NW4SS-6JTDG-3S46L-TUY7M
Used output buffers: 1 of 24 (13 max)
=== RTOS ===
Static ram: 25712
Dynamic ram: 92504 of which 120 recycled
Exception stack ram used: 296
Never used ram: 12440
Tasks: NETWORK(ready,628) HEAT(blocked,912) MAIN(running,3824) IDLE(ready,160)
Owned mutexes:
=== Platform ===
Last reset 00:05:04 ago, cause: power up
Last software reset at 2021-04-08 17:40, reason: User, spinning module GCodes, available RAM 12424 bytes (slot 2)
Software reset code 0x0003 HFSR 0x00000000 CFSR 0x00000000 ICSR 0x0441f000 BFAR 0xe000ed38 SP 0xffffffff Task 0x4e49414d
Error status: 0
Free file entries: 10
SD card 0 detected, interface speed: 20.0MBytes/sec
SD card longest block write time: 3.4ms, max retries 0
MCU temperature: min 23.6, current 23.8, max 24.1
Supply voltage: min 24.2, current 24.2, max 24.3, under voltage events: 0, over voltage events: 0, power good: yes
Driver 0: standstill, SG min/max not available
Driver 1: standstill, SG min/max not available
Driver 2: standstill, SG min/max not available
Driver 3: standstill, SG min/max not available
Driver 4: standstill, SG min/max not available
Date/time: 2021-04-14 16:35:54
Cache data hit count 659643444
Slowest loop: 7.55ms; fastest: 0.07ms
I2C nak errors 0, send timeouts 0, receive timeouts 0, finishTimeouts 0, resets 0 -
@siam There actually are mode code coming out of the M122, but was marked as spam by the forum so I cannot post them here...
-
You'll need to generate a config file set for your printer here: https://configurator.reprapfirmware.org/
At the end save the zip file and then upload it to the web interface system tab.
You can't move a motor before it's been homed by default.
If you want to force motor movement to see if it's working you can send
G92 X100 Y100 Z100to trick the firmware into thinking the axis have been homed. You can then use the jog buttons to move the motors but be careful because without the proper axis dimensions and homing sequence it won't know the actual position of the print head and will gladly smash into the frame if you tell it to. -
@phaedrux How to check if my printer was originally shipped with RepRapFirmware?
-
@phaedrux I just checked the Filastruder website where I bought the board from, it is shipped with RepRapFirmware. Then which predefined template should I choose? Thank you!
-
What kind of a printer do you have?
-
@phaedrux I use an extruder to print. I only need to board to control the motion system, extrusion and hot end temperature. The hot bed has it's own controlling system.
-
Maybe take a look at some of these guides to get a feel for how the configuration system works.
https://duet3d.dozuki.com/Wiki/ConfiguringRepRapFirmwareCartesianPrinter
https://duet3d.dozuki.com/Guide/Ender+3+Pro+and+Duet+Maestro+Guide+Part+1:+Wiring/37
-
@phaedrux The frame for the movement system is a cartesian C-beam machine like this:https://openbuildspartstore.com/openbuilds-c-beam-machine/
-
Where are you getting stuck in the config tool?
-
@phaedrux The hot end and fan use digital signal so I cannot wire them directly to the hot end and fan connecters. I think I should wire them to the expansion board instead. When I generate the config file, on the expansion boards page, it says no expansion board configured.
Another question I have is, what is the xyz movement unit in the Duet web control? I need to adjust the step size according to the screw. Thank you!
-
@zfeng said in Motor doesn't move:
The hot end and fan use digital signal so I cannot wire them directly to the hot end and fan connecters.
Can you provide more detail about what you're trying to control?
@zfeng said in Motor doesn't move:
Another question I have is, what is the xyz movement unit in the Duet web control? I need to adjust the step size according to the screw.
The unit is millimeters. To adjust how many steps per mm are used you need to adjust the M92 command in config.g or define it in the config tool for the motor.
-
@phaedrux I want to use the expansion board of my duet 2 ethernet with 2.05 firmware. When I try to generate the config code, the expansion board page shows "No expansion board configured".
-
@zfeng
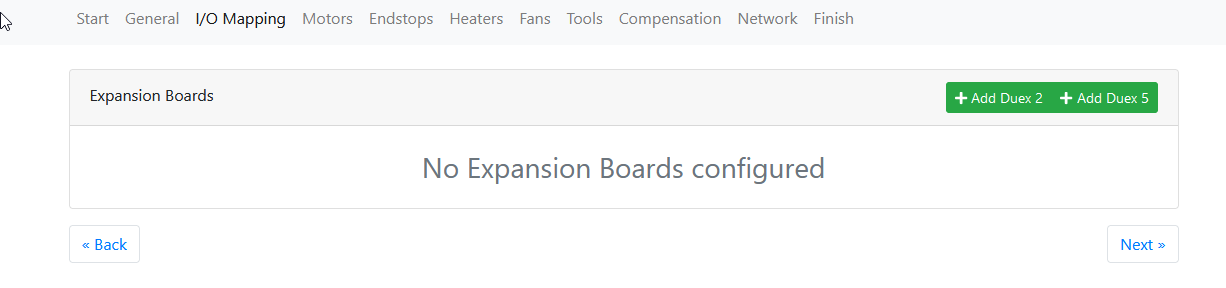
you see on the right top two buttons if you click on it the dueX will be added