Connecting stepper motor encoders to closed loop drivers
-
@baird1fa Okay thanks. Also my old drivers do not have a connection slot for the Alarm, Brake, or Com-. Can I leave these connections empty or do they need to be connected?
-
@v-a-m-p-printing-snproj said in Connecting stepper motor encoders to closed loop drivers:
Does the process consist of connecting the encoders to the drivers and they will begin reading or do I need to configure something else to get a read from the encoders?
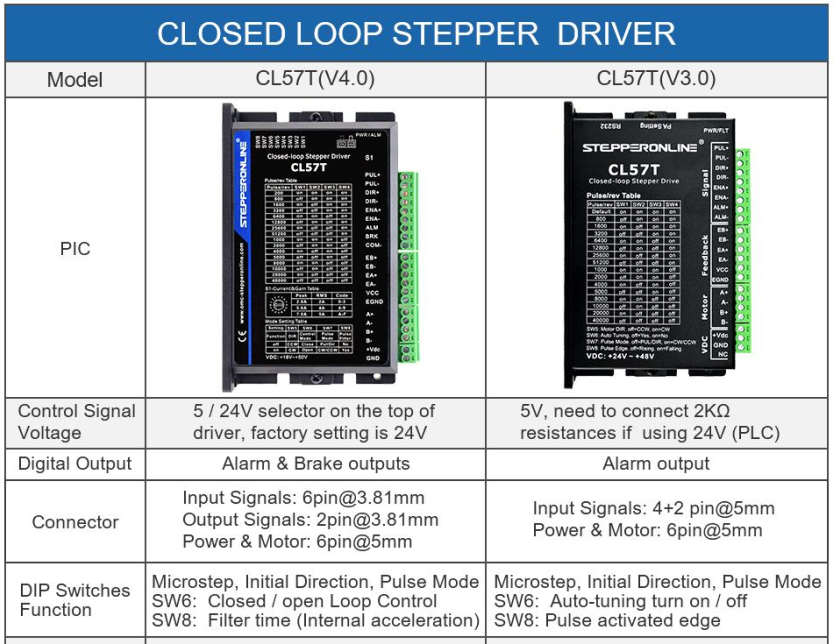
Some versions of CL57T have a switch to set open-loop vs. closed-loop mode and some do not.
Can you post a link to the exact driver you purchased?
-
-
@v-a-m-p-printing-snproj I purchased the v4.0
-
@v-a-m-p-printing-snproj OK, so SW6 controls the mode open-loop or closed-loop.
Connect it and go.
You will almost certainly need to download the correct tuning software from the link you posted and build or buy a communications cable.
You can hook it up and do some testing and if it doesn't perform the way you like you can get the communications software and start there.
-
@v-a-m-p-printing-snproj said in Connecting stepper motor encoders to closed loop drivers:
Also my old drivers do not have a connection slot for the Alarm, Brake, or Com-
You can leave those disconnected.
Can you post a diagram showing how you intend to wire the STEP and DIRECTION connections?
-
@alankilian  image url)
image url)This is my current driver set up. My plan was to connect the encoders and then connect everything from this driver to the new one.
-
@v-a-m-p-printing-snproj OK, I didn't know you had external drivers working already and were just moving to closed-loop drivers.
Let us know how they perform PLEASE!
-
@v-a-m-p-printing-snproj The alarm and Brake will just be outputs that you can use to monitor for an error in the drive (like out of position) or to apply an external brake. The com will be for those outputs.
in my setup I have the alarm status being monitored to stop my controller from tying to continue when one drive has stalled out.
-
Thanks for the help! Ill let you know how they are working. Also what is the connection signal on the duet 2 ethernet? I have the option of setting the drivers to either 5v or 12v.
-
@v-a-m-p-printing-snproj Use 5v setting.
The Duet's 3.3 Volt output might work and if not, you should get the expansion board as described HERE.
-
@alankilian I got it figured out I already have the expansion board. I got the new drivers all connected along with the encoders, but when I try and home the print head it shoots off in the wrong direction and requires me to emergency stop the printer. Any idea why this could be?
-
@v-a-m-p-printing-snproj Your direction signal is the wrong-way around.
In the M569 configuration change the "S" value to say the motor goes the other way.
-
ALSO, first get everything workong in OPEN-LOOP mode by setting SW6 CLOSED.
After you get everything moving in the right directions, you can change to closed-loop mode and see if your encoder is wired backwards.
-
@alankilian Where will I find SW6?
-
-
@alankilian Oh okay what do i want the rest of them to be set to?
-
@v-a-m-p-printing-snproj Set SW1-4 to how ever many pulses-per-rev you want.
What did you have your microstepping set to? 16x? with a 1.8-degree motor that would be 200 * 16 = 3200 steps-per-rev which is SE1-4 Off Off On On Or I bet you could see what your old driver was set to and copy that.
Oh HEY!!! SW5 changes the direction so you don't have to change the "S" setting in your configuration.
And SW6 should be ON to set open-loop control.
They are all described on the front of your driver.
SeemeCNC Rostock Max V3 converted to V3.2 with a Duet2 Ethernet Firmware 3.2 and SE300
-
@alankilian Okay I copied the settings from my other drivers already so ill changing the direction and see how it goes. Thanks!
-
Yes, I can read the switches on your old driver and it was set to 3200 steps-per-rev
Also set the rotary switch to 0 so when you start your closed-loop experiments it will be "weak". You can make it stronger once you get things working.
All the switches are described in the manual available HERE.
