Scanning Z probe support in RRF 3.5
-
@dc42 Is there a way to store probe points only when the probed height has changed? That would compress the heightmap a lot and we can use a finer probe grid. Or do the probed polygons have to have the same size/shape?
-
That's impressive speed and I can think of multiple use cases, like non-planar. I'd wish there is a comparable solution for non-metalic objects, to 3D scan the already printed object.
-
@dc42 One can always use a mall single beam LIDAR as those small ones used by drones..... Those are not tailored for small distances but something similar for short distances may exist.
-
@brunofporto maybe it's possible to gather the different types in a future RRF version.
-
@o_lampe said in Scanning Z probe support in RRF 3.5:
My favourite sensor would be the IR-probe, too.
Maybe I'm seeing problems, but inductive or capacitve sensors are reacting slower than light sensors. Because they store energy and may have a filtering/smoothing behaviour?The prototype that I put together reacts very quickly, even faster than the IR sensor does because the IR sensor has some filtering. Currently I use the 20mm diameter x 1.5mm thick sense coil supplied with the breakout board, but I intend to try a smaller one.
@brunofporto said in Scanning Z probe support in RRF 3.5:
@dc42 One can always use a mall single beam LIDAR as those small ones used by drones..... Those are not tailored for small distances but something similar for short distances may exist.
I look at LIDAR sensors occasionally but so far they don't have sufficient precision or reproducibility to be good enough to use as a Z probe. Even if we accept a precision and reproducibility as large as 10um (so 20um round trip for the laser), that would require measuring the laser round trip time to within an accuracy of about 0.07 picosecond.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42 could we use the analogue output from a linear hall effect sensor measuring the location of a ball rolling across the bed surface as an input for this?
I assume there is already a need to for some form of analogue input to distance calibration routine?
Many thanks
Barry MPolar Duet3 Mini + 1HCL
https://youtube.com/playlist?list=PLWjZVEdMv1BY82izahK45qKh-hp3NFkix
Wanhao D4S: Duet2
https://forum.duet3d.com/post/296755
K40 Laser, Duet2
https://forum.duet3d.com/post/312082
Wanhao D5S
https://www.youtube.com/CNCModellerUK -
@dc42 plus the issue with different types of surfaces...... Still have my laser filament sensor

I like @CNCModeller idea of the indirect measurement with a ball but then there is the dynamic problem of a ball "jumping" on small defects or residual first layers.
-
@CNCModeller said in Scanning Z probe support in RRF 3.5:
could we use the analogue output from a linear hall effect sensor measuring the location of a ball rolling across the bed surface as an input for this?
Yes, in principle.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@brunofporto
The ball could be held down by a (plastic) spring. Like a big ballpen.
That was at least my idea for building an inductive probe for glass plates and other non-metallic surfaces. The 8mm pinda probe would've been ideal.
But I find non-touching probes better suited for fast scanning moves. -
@dc42 said in Scanning Z probe support in RRF 3.5:
The prototype that I put together reacts very quickly, even faster than the IR sensor does because the IR sensor has some filtering
But you can easily change the IR-probe circuit, because it's your design?
These inductive/capacitive probes are a black box.@CNCModeller I like your idea too, but I'm concerned about the probing range. Should be no problem for mesh probing, but levelling often starts with two or more passes bed-tramming. That would better be done the classic up/down way.
-
@dc42 Can this be wired to io2 input on the 6hc 1.01 if the resistor is bypassed or can I use the 3hc expansion board?
-
@lparnell34 said in Scanning Z probe support in RRF 3.5:
@dc42 Can this be wired to io2 input on the 6hc 1.01 if the resistor is bypassed or can I use the 3hc expansion board?
I2C doesn't travel long distances well. It was designed for connections between ICs on a single PCB. The signal is pulled to ground actively but relies on pullup resistors to pull it high, which makes it susceptible to noise - and I2C has no error correction protocol. Therefore I advise against using I2C with wire lengths greater than a few cm.
RRF for the 6HC doesn't yet support I2C - we haven't yet written a driver for the I2C peripheral in the SAME70 processor.
RRF for the 3HC doesn't currently support I2C, however it should be possible to enable it in the Pins_EXP3HC file because the driver that we already use for the tool board should work.
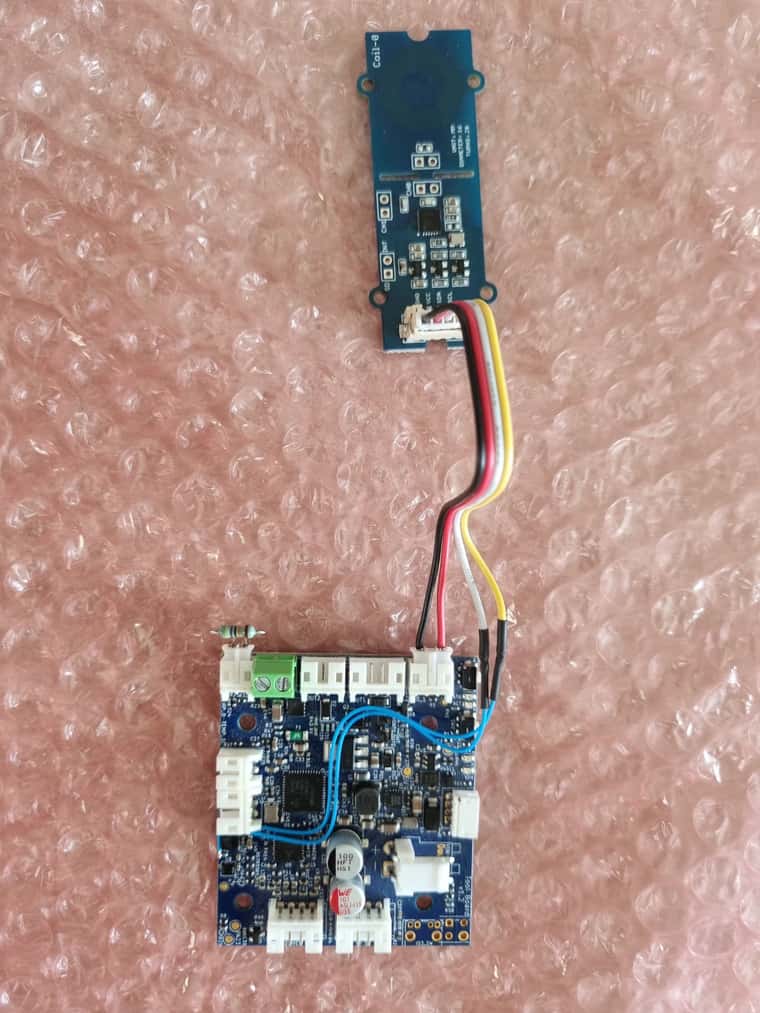
For now the best ways to connect the LDC1612 are probably to hack a tool board as I did (I will publish details on my blog soon) or to use a SAMMYC21. For the future, we are considering making a dedicated CAN-connected board to support the LDC1612 as well as tool board variants with this chip on board. However, we still need to determine whether this type of inductive sensor is good enough to be worthwhile, given the known temperature sensitivity issues of inductive sensors.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42 thanks. I'm going to use a sammy-c21 board. Can I connect the can-out on the tool distribution board to the sammy-c21? Or do I have to use one of the four can connections for the tool boards?
-
@lparnell34 said in Scanning Z probe support in RRF 3.5:
@dc42 thanks. I'm going to use a sammy-c21 board. Can I connect the can-out on the tool distribution board to the sammy-c21? Or do I have to use one of the four can connections for the tool boards?
You can do either.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42 is this something that you think you can connect into existing tool boards going forward, or will we need to buy a new tool board
-
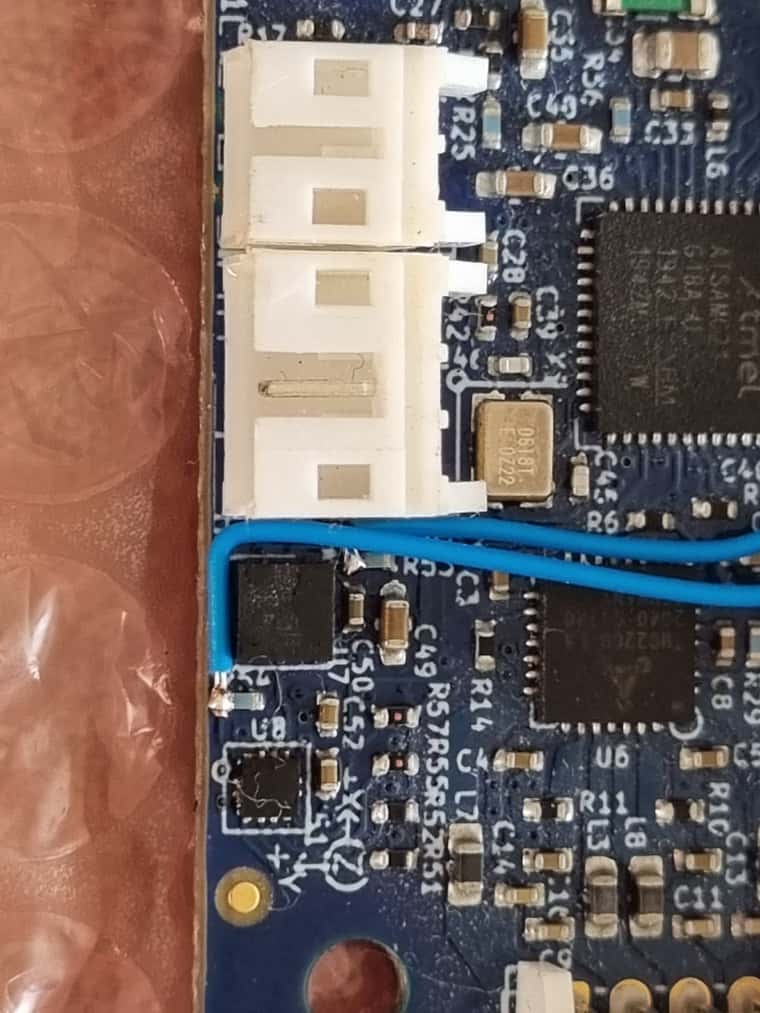
@samlogan87 it can be connected to existing version 1.1 and later tool boards if you can use a soldering iron with a very fine tip. Here's how I connected mine.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42 Jeepers, these sausage fingers will struggle with that. Might have to ask a mate. It is hard to see where the upper connection point is from that photo
Custom Core-XY
-
@dc42 do you have a similar connection guide for a Sammy board?
Polar Duet3 Mini + 1HCL
https://youtube.com/playlist?list=PLWjZVEdMv1BY82izahK45qKh-hp3NFkix
Wanhao D4S: Duet2
https://forum.duet3d.com/post/296755
K40 Laser, Duet2
https://forum.duet3d.com/post/312082
Wanhao D5S
https://www.youtube.com/CNCModellerUK -
@CNCModeller when using our standard firmware build for the SammyC21, you would connect the SDA pin of the LDC1612 to PA22 and the SCL pin to PA23.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@samlogan87 said in Scanning Z probe support in RRF 3.5:
hard to see where the upper connection point i
I would say it is the left side of
R55R53. I would 3D a little housing and use two pogo pins to make the connection, so there would be no need to solder. I've ordered the Grove board and will make experiments also.