Control for “Maslow” style cnc
-
Hi All, sounds like I’ll be moving to a larger workshop next spring and I wanted to start thinking about this again. It was discussed here briefly, does anyone have any further thoughts?
https://forum.duet3d.com/post/236979
All the best
Barry MPolar Duet3 Mini + 1HCL
https://youtube.com/playlist?list=PLWjZVEdMv1BY82izahK45qKh-hp3NFkix
Wanhao D4S: Duet2
https://forum.duet3d.com/post/296755
K40 Laser, Duet2
https://forum.duet3d.com/post/312082
Wanhao D5S
https://www.youtube.com/CNCModellerUK -
@CNCModeller Didn't know a CNC router could work that way...
Imagine, you would use a CO2 laser tube instead. Placing it vertical would only require the mirror in the lens-holder. -
@o_lampe they seem to be having good success with their approach. I’m sure the accuracy isn’t as good as a traditional xy cartesian table but if the end product doesn’t require it…
https://www.kickstarter.com/projects/maslow4/maslow4-affordable-compact-large-format-cnc-router
Definitely something I’m interested in experimenting with especially if I can keep all of my machines in the same ecosystem.
Polar Duet3 Mini + 1HCL
https://youtube.com/playlist?list=PLWjZVEdMv1BY82izahK45qKh-hp3NFkix
Wanhao D4S: Duet2
https://forum.duet3d.com/post/296755
K40 Laser, Duet2
https://forum.duet3d.com/post/312082
Wanhao D5S
https://www.youtube.com/CNCModellerUK -
@CNCModeller I'd wait for Maslow CNC V5, which might come with brushless motors and no gearbox?
//edit
I know we could use BLDC motors as belt tensioners (simpleFOC in angle mode). That way we could get away with only two motors on the effector. I think something similar was done with the 3D hangprinters, too? -
This thread seems to indicate, that the hangprinter kinematic could be used for a 2D modell.
But I doubt it, because there are only 3 motors for 2D motion and 1 motor for Z.
The first Maslow CNC used only two motors and gravity. Maybe thats an option, if you can configure the anchor-points of A+B motor accordingly. (C+D as Dummy?)
IIRC the whole hangprinter story started with 2D kinematic, you just have to roll back to the basics.There's an exemplary hangprinter setup, I'm about to read,
but I'm not exactly sure if the ABCD definitions in this line:M669 K6 A0.0:-2000.0:0.0 B1732.0:1000.0:0.0 C-1732.0:1000.0:0.0 D2000.0 P1000.0
are the position of the anchor points?Anyway, my curiosity is triggered and I will build a small Maslow style test setup.
A quick sketch, how I think to solve the belt tensioning problem without putting weight on the effector.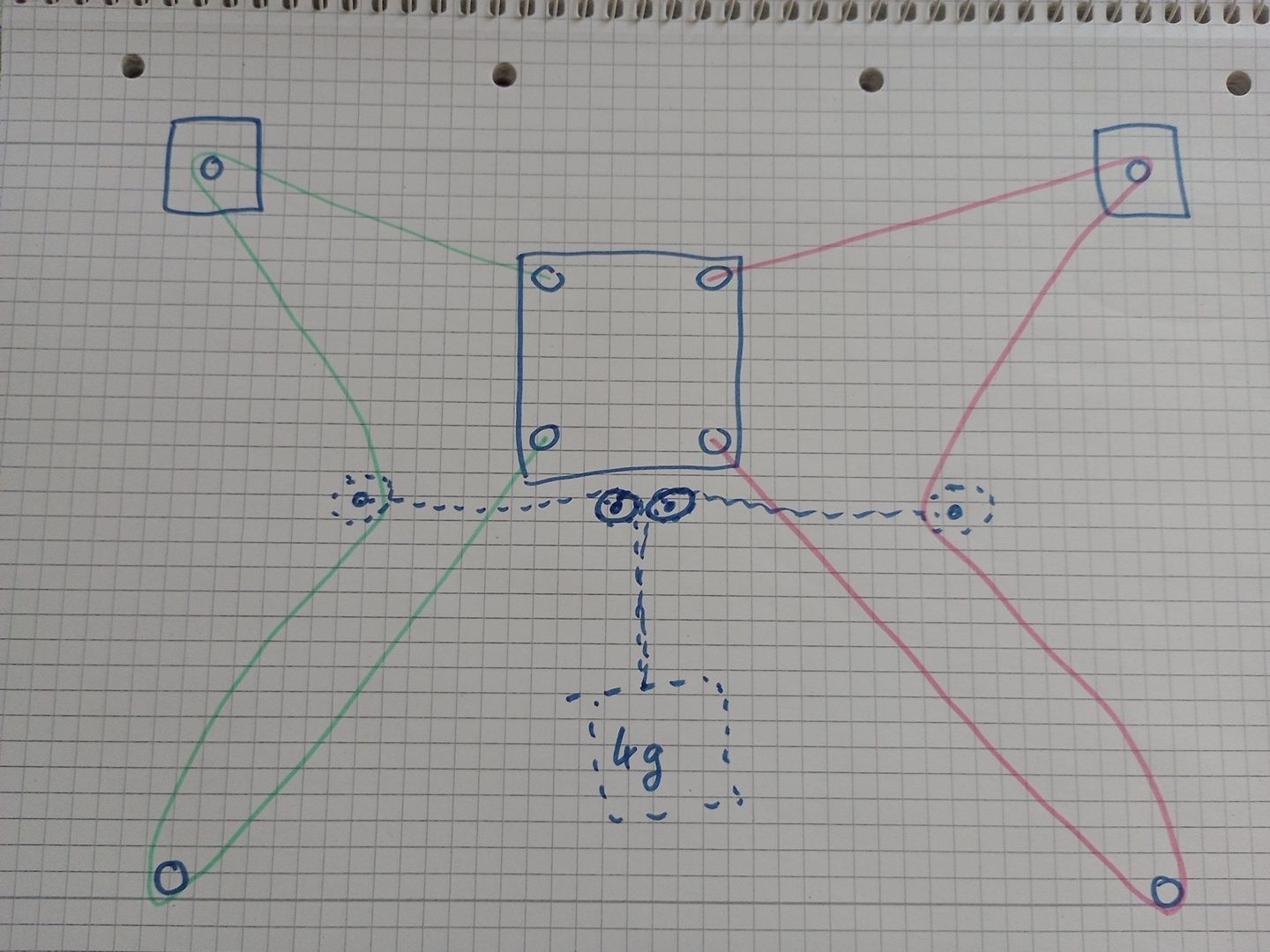
//edit #2 There has to be another roller on the weight. It's missing in the drawing.
-
@CNCModeller Polar (or Polargraph) Drawbots have been doing this for some time: https://www.google.com/search?q=polar+drawbot
As @o_lampe says, the Hangprinter kinematics should be able to do this (yet to be proved). Alternatively, there's a number of Github projects that you could copy the kinematics from, and add it to RRF.Let us know how you get on!
Ian
Bed-slinger - Mini5+ WiFi/1LC | RRP Fisher v1 - D2 WiFi | Polargraph - D2 WiFi | TronXY X5S - 6HC/Roto | CNC router - 6HC | Tractus3D T1250 - D2 Eth
-
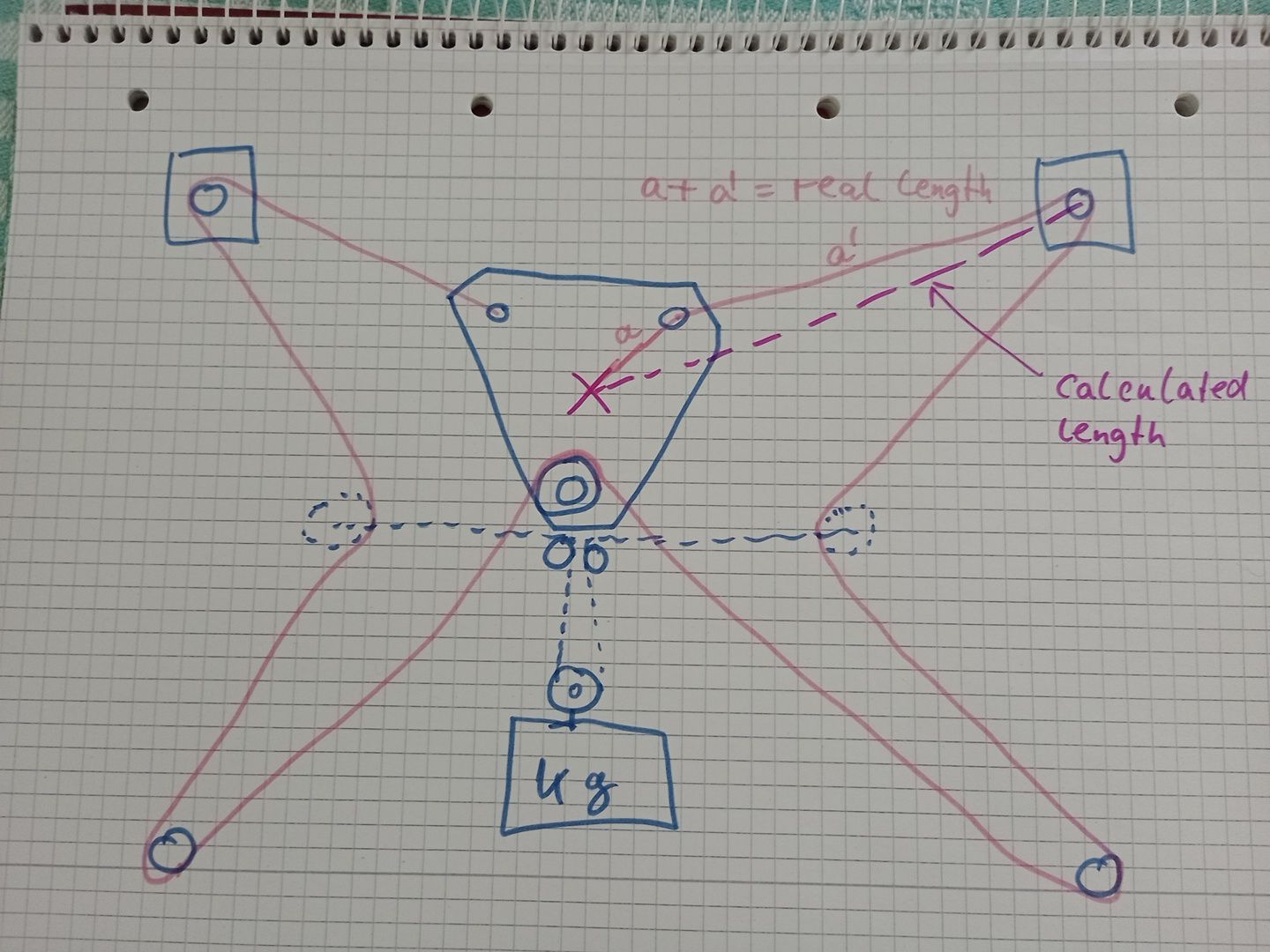
I've drawn another sketch which only needs one belt by using a idler on the bottom of the effector.
That way I can also reduce the amount of belt-length correction by 50%.I was wondering if RRF kinematic handles the difference between calculated and real length (caused by varying angles between fix points and center of effector)? Or is this the reason, why some builders report slacking lines or overtight lines?
-
@droftarts that’s interesting, I’m really only wanting to make custom shipping crates from sheets of plywoo. I could just use a large plotter to mark out the cuts and then a jigsaw, obviously being able to do the cutting is a bonus but it wouldn’t be something that’s used every day.
Polar Duet3 Mini + 1HCL
https://youtube.com/playlist?list=PLWjZVEdMv1BY82izahK45qKh-hp3NFkix
Wanhao D4S: Duet2
https://forum.duet3d.com/post/296755
K40 Laser, Duet2
https://forum.duet3d.com/post/312082
Wanhao D5S
https://www.youtube.com/CNCModellerUK -
@o_lampe I like the idea definitely something worth thinking about.
-
@CNCModeller said in Control for “Maslow” style cnc:
a large plotter to mark out the cuts
That'll be much more accurate I guess, but the pen would need a bit of downforce to write. Maybe a small vacuum hose on the effector? Or an airbrush instead of a pen? That way you can also put your Logo on the crates or a "Fragile" sign...
A diode laser would probably work too, but the lines would be very fine. -
@CNCModeller said in Control for “Maslow” style cnc:
I could just use a large plotter
Something like the open source Makelangelo would work: https://www.marginallyclever.com/products/makelangelo-5-huge/
It runs on Marlin, so I'd think it would be transportable to Duet: https://www.marginallyclever.com/2021/10/friday-facts-4-how-to-marlin-polargraph/
A very old blog post about the kinematics https://www.marginallyclever.com/2012/02/drawbot-overview/
His software looks pretty fully-featured for making wall art, too.Alternatively https://www.instructables.com/Polargraph-Wall-Draw-Bot-2023/ has a link to GRBL-Polargraph fork.
I'm pretty keen to make one of these, too, in case you hadn't realised... Somehow just need to find the time to see if the Hangprinter kinematics will work, or if we need to lift the Polargraph kinematics from Marlin or GRBL.
It would be cool to mount a low power diode laser on something like this to cut custom cardboard packaging, too.
Ian
Bed-slinger - Mini5+ WiFi/1LC | RRP Fisher v1 - D2 WiFi | Polargraph - D2 WiFi | TronXY X5S - 6HC/Roto | CNC router - 6HC | Tractus3D T1250 - D2 Eth
-
@droftarts I started building a test-rig, but without steppers. Just to proove my belt-length correction theory. It's still a lot to compensate, I think I might use a torque-mode BLDC instead of the weight. (simpleFOC driven, since it can be completely independent from RRF)
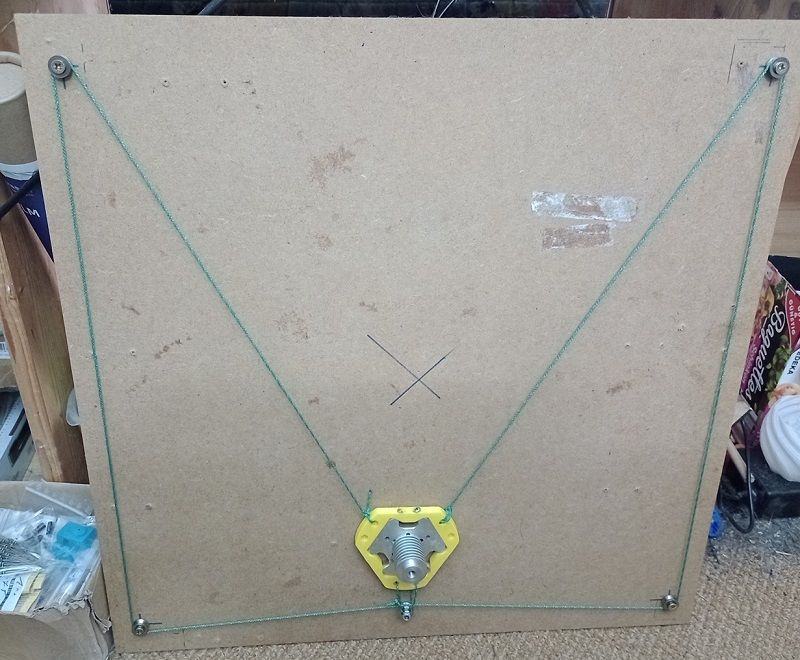
PS: The effector was the first thing I found when looking for a triangle shaped thing. I might make a supercheap sandtable instead.
-
@o_lampe Nice. Did it work?! I think what you have nearly made is a CoreXY! The nice thing about the Polarbots is that they only need two pivot points, at the motor. Yours needs a full frame, so it may as well be a CoreXY, perhaps more like https://corexy.com/botofthecloth/index.html
What I've noticed from most of the polarbots I've looked at is that there is a linkage for each belt around the centre of the effector, so that it's always a straight line between motor and 'pen' (or spindle). The Makelangelo and Maslow does this, in different ways. More complicated physically, but less computation within the kinematics.
Ian
Bed-slinger - Mini5+ WiFi/1LC | RRP Fisher v1 - D2 WiFi | Polargraph - D2 WiFi | TronXY X5S - 6HC/Roto | CNC router - 6HC | Tractus3D T1250 - D2 Eth
-
@droftarts Opposite to a CoreXY I don't need linear guides or a crossbeam. The motion is similar, but there's no linear correlation between A+B motors.
Until the weekend I'll have a stepper driven rig. Then I can post a video. -
@o_lampe I just realised the Maslow4 is quite different. The Maslow 1 and 2 (no idea what happened to Maslow 3) were polarbots, with a belt/chain from each top corner, but the Maslow 4 is more like a 2D quad-tower delta, and probably much closer to Hangprinter than previous versions. Again, the Hangprinter kinematics might do this, too.
Ian
Bed-slinger - Mini5+ WiFi/1LC | RRP Fisher v1 - D2 WiFi | Polargraph - D2 WiFi | TronXY X5S - 6HC/Roto | CNC router - 6HC | Tractus3D T1250 - D2 Eth
-
@droftarts Maybe the Maslow_3 was a flop and that's why they again had to kickstart their next project? They even pulled the "Ukraine" card to gain more money.
IMHO the Maslow_4 isn't a good design, using brushed DC motors and expensive ODrive controllers.there is a linkage for each belt around the centre of the effector, so that it's always a straight line between motor and 'pen'
I think I figured out how to trick RRF to do the correct calculations without rotating belt links. It's similar to Delta-kinematics, where we have to measure rod length andhorizontal distancebetween towers and effector.
I just have to measure the horizontal distance from motorshaft (minus pulley radius) to the fixed link on the effector. Will add it in my next picture for reference.PS: I like the
BotofTheClothidea with it's strap-on corners. For a plotter or laser it might be good enough: Just buy a 8' x 6' plywood sheet and clamp the motors and idlers directly. No need for a permanent frame which only occupies workspace 99% of the time. -
@o_lampe said in Control for “Maslow” style cnc:
PS: I like the
BotofTheClothidea with its strap-on corners. For a plotter or laser it might be good enough: Just buy a 8' x 6' plywood sheet and clamp the motors and idlers directly. No need for a permanent frame which only occupies workspace 99% of the time.I had exactly the sam thought, personally the idea of having all of the moving parts in the plotter carriage with just a fixed anchor point at the corner of the 8x6 sheet would be ideal. Literally just put a screw in each corner and attach the belts, calibrate, and you’re r away. Ideally everything would retract into the plotter carriage for storage.
I also like the idea of a diode laser to mark out for manual cuts and labelling.
I could even see a larger version being used to layout where you put holes for steelwork or walls etc on a building concrete slab during construction.
All interesting stuff…
-
I added steppers and a central tightening winch. The idea of the hidden weight is not too good, because it would almost move the same as if it was connected directly to the effector.
This way it won't work with the strap-on corner idea, unless you are willing to drill 3 holes in the 8x6 everytime.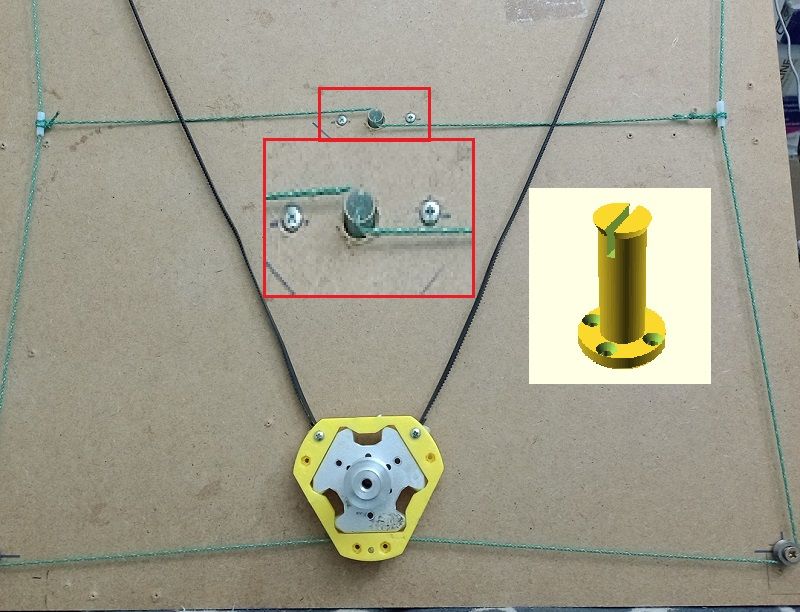
-
I tried my luck and modified config for a 2D hangprinter.
It seems RRF3.4.6 already has the latest version of HP-kinematics. It is oddly specific regarding spool diameter and all.m98 p"config.g" Error: Wrong number of values after '''D''', expected 3 Q:Buildup fac 0.0070 R:Spool r 75.00, 75.00, 75.00, 75.00 U:Mech Adv 2, 2, 2, 4 O:Lines/spool 1, 1, 1, 1 L:Motor gear teeth 20, 20, 20, 20 H:Spool gear teeth 255, 255, 255, 255 J:Full steps/rev 25, 25, 25, 25 HTTP is enabled on port 80 FTP is disabled TELNET is disabled -
@o_lampe What are the commands you are using to define it? I'd imagine that the C and D motors don't really matter in M669. Are the other values set in firmware? That might rather limit the usefulness of the Hangprinter kinematics.
Ian
Bed-slinger - Mini5+ WiFi/1LC | RRP Fisher v1 - D2 WiFi | Polargraph - D2 WiFi | TronXY X5S - 6HC/Roto | CNC router - 6HC | Tractus3D T1250 - D2 Eth