Indirect (bearing) laser filament monitor concept
-
@Adrian52 Thanks. You are right even on run out when S is set to 0 it will not stop the extruder. I did that experiment a few days ago and just forgot about it.
-
@Adrian52 what does the A parameter do? I don't see that defined on the reprap g-code wiki site.
-
@mitch see https://duet3d.dozuki.com/Wiki/Gcode#Section_M591_Configure_filament_sensing
An (firmware 2.03 and later) 1 = check All extruder motion, 0 (default) = only check extruder motion of printing moves (moves with both movement and forward extrusion)
Ian
TronXY X5S with Duet 3 MB6HC and Roto toolboard : Cartesian bed-slinger with Duet 3 Mini 5+ WiFi and 1LC : RRP Fisher Delta v1 with Duet 2 Maestro : Polargraph with Duet 2 WiFi
-
@droftarts Thanks
-
I'm waking up this topic, ( deleted mine also ).
Here is my version of indirect filament reading, inspired by your ideas here.
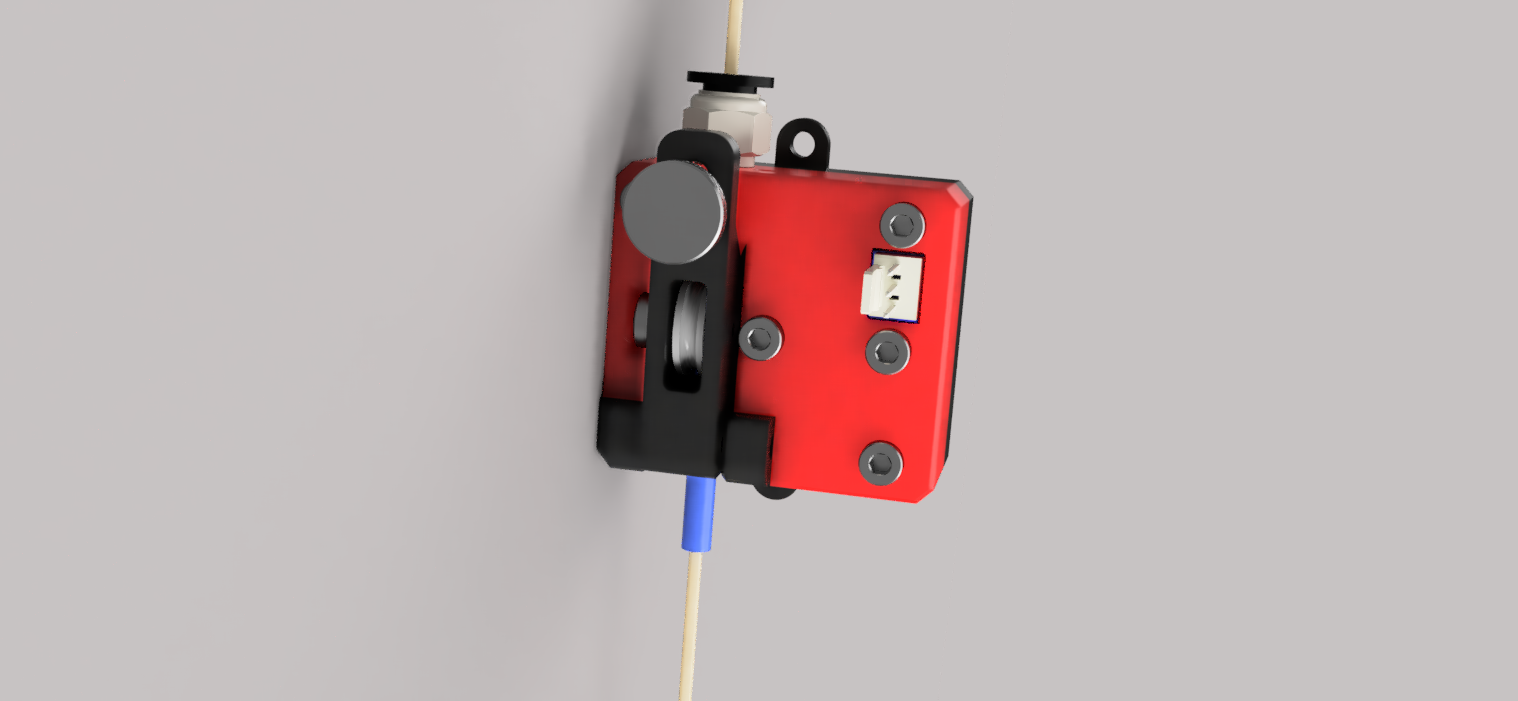
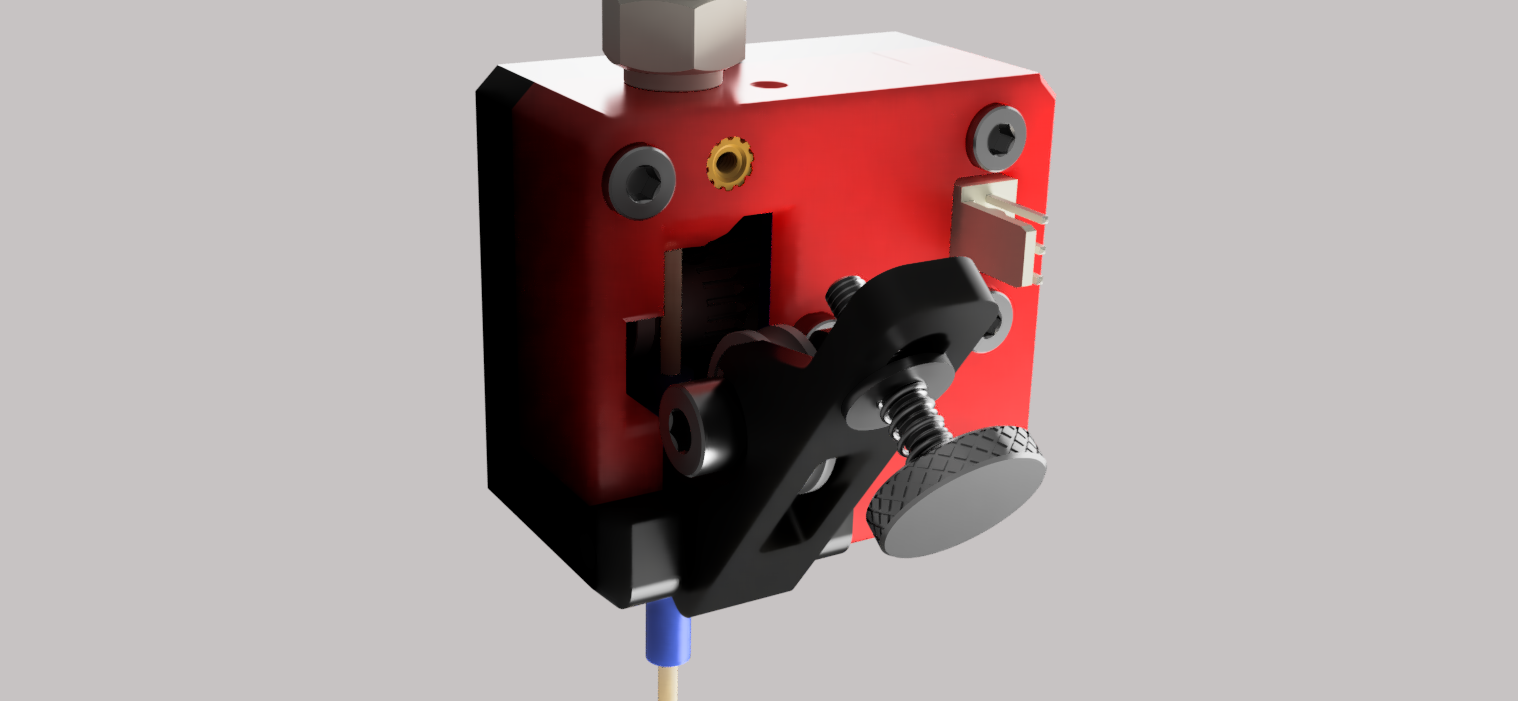
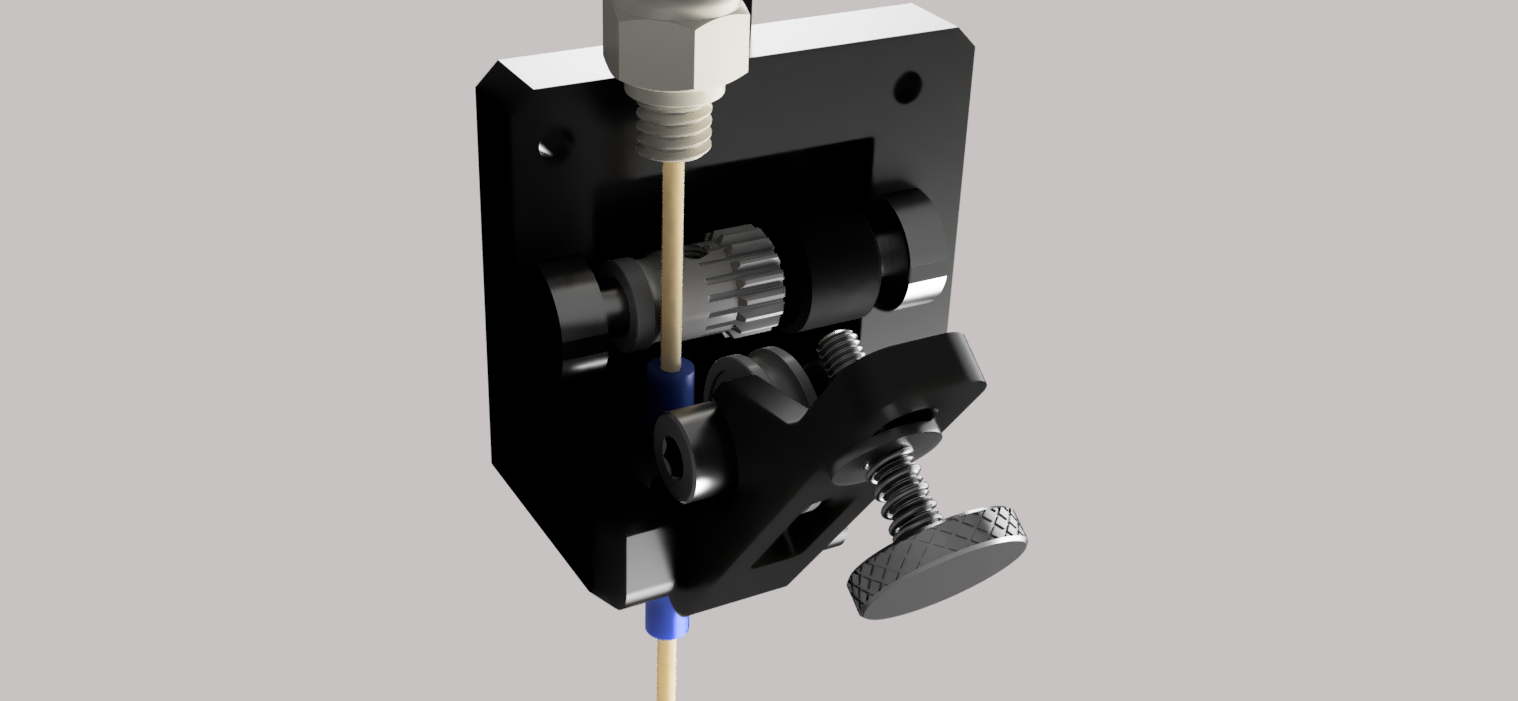
It uses an 5mm shaft hobbed gear from Bondtech and U shape bearing on the latch.
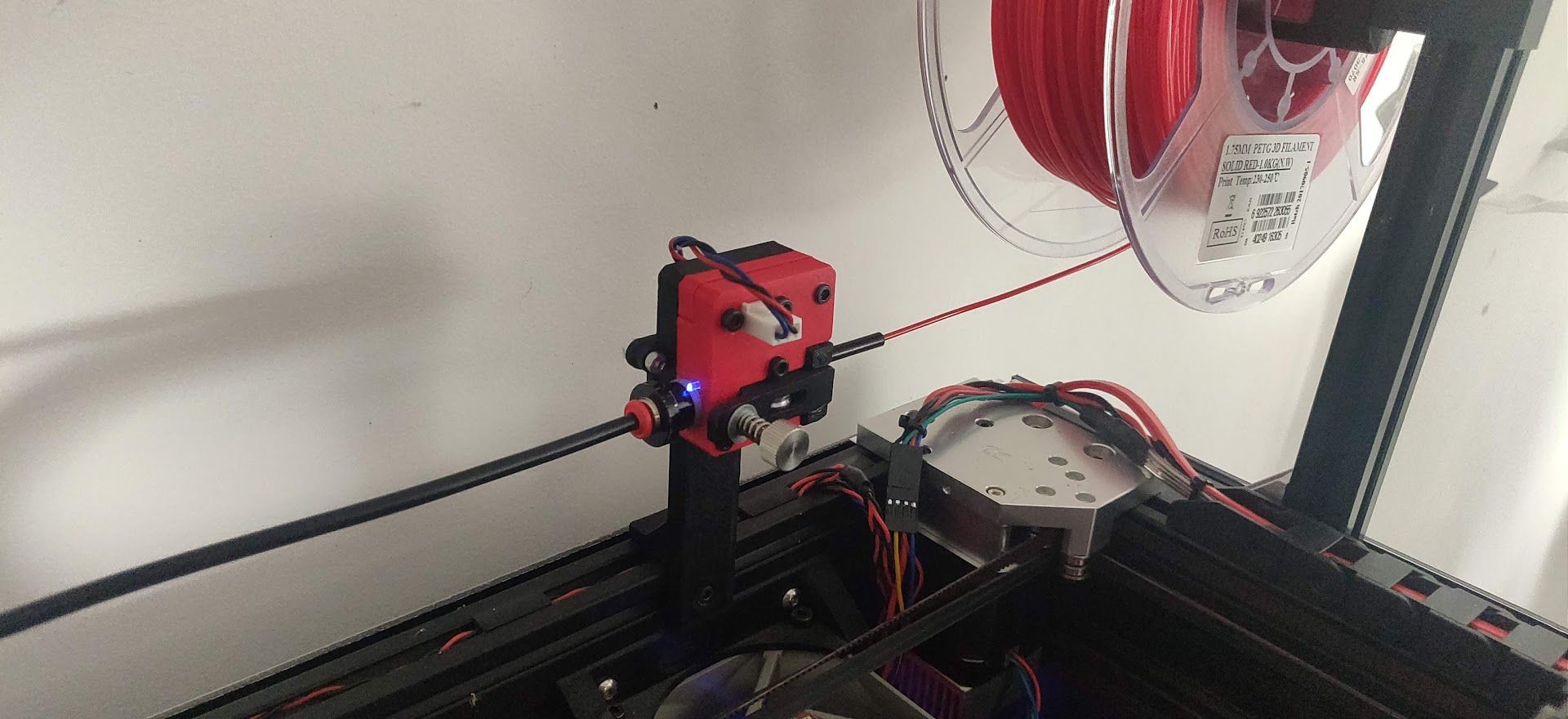
Tensionning can be adjusted from the latch.I use it outside of my DD carriage, don't have any problem with retractions ( considering I have 0.6mm retracts this prollyt explains why ).
https://www.thingiverse.com/thing:4882602
I get readings from 188% to 266% , average 230%. Is it acceptable or should I try to read around the 100% ? I think I can tweak it by adjusting the printed wheel diameter.
-
@kipk you can adjust the calibration factor in RRF 3.2 and later using the M591 L parameter. See https://duet3d.dozuki.com/Wiki/Gcode#Section_M591_RepRapFirmware_Num_3.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42 ho that's just perfect then.
-
@brunofporto just use a bondtech hobbed gear - that's what I use and it always engages with the filament to register movement.
-
That's what I use here, bondtech hobbed gear.
So after using the calibration factor + few change on the indirect casing, I now have this reported values :
measured min 93% avg 101% max 107% over 12365.3mm
Looks far better than what I ever achieved with direct reading.
I still have some false trigger because of the PTFE tube moving too fast with high acceleration, I will restrain it before the filament reader. -
 undefined droftarts referenced this topic
undefined droftarts referenced this topic