Behavior of drivers at high speeds
-
@t3p3tony said in Behavior of drivers at high speeds:
@deckingman can you support the motor shaft with an appropriate bearing at the other end or is it not long enough?
I could maybe just about do it with the Alpha motors but not the Beta motors because I have stacked belts and the pulleys are at the end of the shafts on those motors.
-
@deckingman if you make the motor mounts with different vertical dimensions, by about 12-15 mm, the pulleys can mount right up against the motors.

I used off-the-shelf 2" x 2" and 2" x 1.5" tubing.
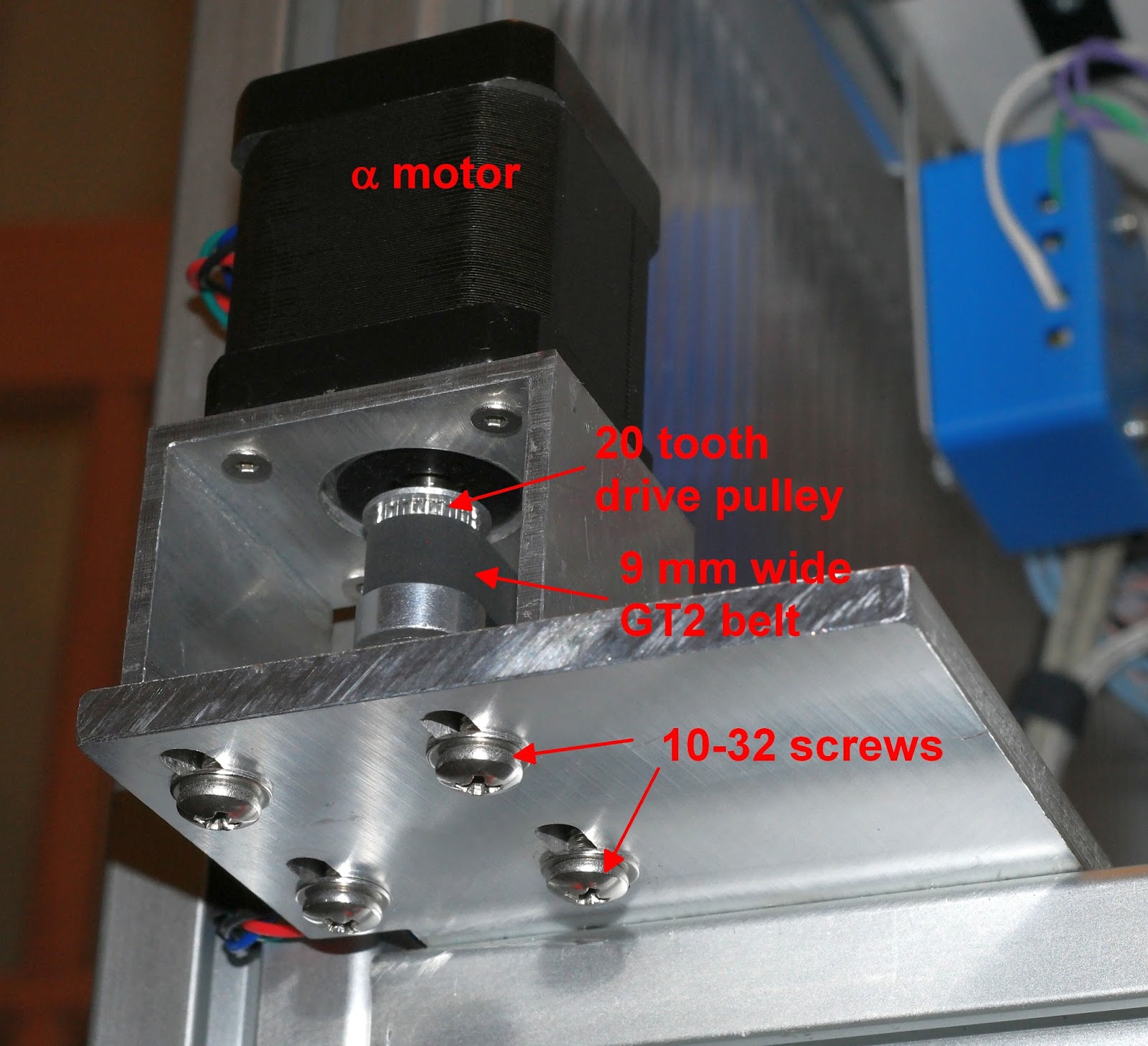
The pulley is mounted in the same position relative to the motor on the B motor.
-
@mrehorstdmd Can't be done on my machine. Or rather, it could be done but I'd have to find a different method to tension the belts, as well as redesign the idler pulley mounts and gantries. All in all, it would likely be easier to mount the motors "remotely".
It'll have to wait in any case because I've got far too many other things to get on with right now. -
I rebuilt the mechanism with the 1:5 drive step-up pulleys and installed a Duet Wifi controller.
The result is mixed- the step up keeps the motor speed low even though the mechanism moves at 500 mm/sec, and I can use 256:1 uninterpolated microstepping. I'm having two problems- a lot of the remaining noise seems to be from the bearings in the pulleys and the belt teeth making a slight zipping sound on the small diameter, smooth pulley surfaces, and the torque from the motors is just enough to make the mechanism work, but if I push the acceleration or jerk a little too high, it starts skipping steps. That's without the magnet dragging against the bottom of the table and a ball in sand. The motors hiss a lot, too, though I adjusted the F parameter in the motor configuration- I've got the current cranked up to 1800 mA (2A motors) to get adequate torque.
All testing has been done with a 12V power supply. I'll try with 24V to see if anything improves.
I think I need to reduce the step-up to 1:4 to recover some of the torque, and use larger diameter or maybe toothed pulleys to reduce the belt noise. I think larger diameter pulleys would be the better way to go. The UHMW bearings in the magnet carriage are a little tight, so I'm going to cut some new ones out of PTFE and make them a little looser to reduce drag.
I'll post a test video later today.
-
I would think 24v would help a lot.
-
24V didn't help much.
I redesigned the mounts to fit the NEMA-23 motors I originally used in the sand table. The NEMA-17 motors were rated for 0.59 Nm holding torque and the NEMA-23s are rated for 1.27 Nm. I'll bore out the 80 tooth pulleys for the NEMA-23 1/4" shaft and test it later today.
The zippy noise seems to be coming from the belt teeth hitting the small, smooth pulley surfaces, so I'm going to try twisting the belts and see if they run quieter with the back sides of the belts riding on the pulleys.
The sand table is going to be exhibited at the Milwaukee MakerFaire next weekend, so if this 1:5 step-up stuff isn't working by Tuesday, I'll fall back to the NEMA-17 direct drive. At the MakerFaire, the noise doesn't matter and will probably be inaudible over the ambient noise at the event.
-
The NEMA-23 motors work fine with the 1:5 step up. The sound of the UHMW bearings sliding on the t-slot is now a significant portion of the noise, most of the rest being the zip-zip sound that I think is coming from the belt teeth hitting the pulleys. I'll try putting twists in the belts tomorrow.
The NEMA-23 motors seem to produce less of the hiss type noise that the NEMA-17 motors were producing.
-
Update: success!
The combo of 256:1 ustepping, 1:5 drive step-up (which divides torque by 5, hence NEMA-23 motors), and twisting the belts has quieted the mechanism to the point where the biggest noises come from the ball bearings in the pulleys and the sliding noise from UHMW bearing blocks on the X and Y axes. There's no discernable motor or belt noise at all. The motors spin at 1.25 revs/sec when the mechanism is running at 500 mm/sec.
Video here: https://vimeo.com/360320863
I did the first test with the whole table assembled at the Milwaukee Makerfaire this weekend and it was less than successful. The problem was high friction in the X axis causing the pattern to shift. I had lubed the X axis with some silicone lubricant but it only lasted a couple hours before the pattern shifting started.
I'm working on that problem now.
-
Now it just sounds like a machine gun!

Seriously cool though, I'm looking forward to seeing it in action.
-
I milled some teflon bearings for the X axis yesterday at the makerspace and shot some poor quality video of the table running.
I'll try to get better quality video tonight...
Remaining noise is mostly from the bearings in the pulleys, though it now has a "klunk" that happens when the Y axis is near one end of the table- I'll have to figure out what causes that.
-
What a fantastic piece of living art!
Brilliant.
-
I've never encountered a sand table before, didnt know they were a thing at all.
Now I do, and I'm seriously impressed. Wonderful idea, lovely results, big thanks for sharing that. -
@mrehorstdmd said in Behavior of drivers at high speeds:
I milled some teflon bearings for the X axis yesterday
albeit a little late (and slightly OT), I'd like to point out Igus filament for this kind of application... since we're 3D printing around here
") the I150-PF type is the easiest to print and should be sufficient for your bearings.
the I150-PF type is the easiest to print and should be sufficient for your bearings.Best regards, Niklas
(disclosure: I work for igus)
-
Thanks for comments. I'm not the first to make one of these tables, but as far as I know, it runs faster than anyone else's table, and now does so quietly. I believe other tables run slowly to keep the noise down to an acceptable level.
I originally built it for a makerfaire where there was no issue with it making noise. I wanted it to run fast so that it would be interesting to watch (it's really great to stand around it with a drink in your hand). If it goes much faster than 500 mm/sec, it tends to throw the sand around which reduces the quality of the pattern and gets sand stuck to the bottom of the clear plastic top cover.
-
@mrehorstdmd said in Behavior of drivers at high speeds:
If it goes much faster than 500 mm/sec, it tends to throw the sand around which reduces the quality of the pattern and gets sand stuck to the bottom of the clear plastic top cover.
You need some of this stuff:
Seriously, it's not a Christmas decoration for your tree, it's genuine pure copper tinsel! Widely used in machines which handle paper at very high speeds to bleed off the static charge that inevitably accumulates.
If you could edge the plastic window with this tinsel without it looking all too festive and ground the tinsel to your (obviously) grounded frame, the sand probably wouldn't stick to it any more.
-
@mrehorstdmd
"The spice must flow"
Eon- Void Dweller? -
-
@mrehorstdmd I've wanted to build a sand table since I saw the Sisyphus. Like you, I figured out the underlying Rho/Theta mechanism, namely a rack and pinion on one shaft, the whole thing pivoting on the other. And also anticipated the kinematic pluses/minuses. Unlike you, I never built an implementation of that architecture.
I've seen several XY implementations; Descartes just doesn't inspire me. So again, no build on my part.
I very recently found your blog, Github, etc, etc. The SCARA version is inspirational. I've downloaded the STLs, ordered the pulleys, and I have most of the other stuff already. I am looking forward to getting a prototype running based on the size/scale of your pre-390 effort. You've kicked me into motion! (ha ha)
After that, I'm going to (attempt) a roughly 4 foot (1200mm) circle as a piece of fine furniture. I already own a CNC router and I'm planning to cut pieces of maple and some darker wood to alternate all the way around the glass. We have a perfect spot for it in the entryway of the house, a curved wall associated with a stair.
I'm also fascinated with the motion planner in your ESP code. I've been working on a similar planner for a "W" linkage clock. There are already several of these that use Radio Control hobby servos; I am building a much bigger one with stepper motors to drive the W. Thus the planner. Looking forward to reading your SCARA planner code, it will be very similar.
I'm drifting from my point... which is: You've inspired me to pursue something I've been thinking about for a very long time. THANK YOU for publishing your ideas, the journey to implementation, and results.
Thank you very much.
-
@Danal Thanks, but that's not my code. Jeff Eberl (and some others) wrote the pattern generating code.
In the video you may notice that the ball spends a lot of time going back and forth on the edges of the table. I'm slowly working at an algorithm to remove all the unnecessary back and forth at the edges of the table, and hope to eventually write a perl script to post-process the gcode files from sandify. That will reduce wear and tear on the mechanism and make it more interesting to watch.