Linear motors: Day Dreaming about future printers.
-
I've been thinking about the "unrolled stepper motor" since the moment I became aware of it. I never really knew of any viable product. Recently, though, I came across a catalogue with a couple very interesting products. I'm speechless.
So, like, anybody else's mind start racing and their heart start beating faster after seeing this?
-
Alas, my wallet tells me that I can't afford it

-
If you want the next (?) best thing, try servomotors:
https://vimeo.com/422175403
https://vimeo.com/423704831I run the sand table at 1500 mm/sec with 20k acceleration and the motors don't even get warm.
They cost about $100 each shipped from China. Add an expansion board to the Duet and drive them with step/dir/enable. No modifications required, but bigger power supplies are a good idea. If I push acceleration above 20k they tend to cause the power supplies to shut down. I'm using a 200W supply on one and a 150W supply on the other.
I'll be testing them in my printer soon.
-
This is "direct drive." The load is directly attached to the motor. There is basically no backlash. Everything else is just dandy, all I care about is the backlash.
-
@mrehorstdmd said in Linear motors: Day Dreaming about future printers.:
I run the sand table at 1500 mm/sec
I thoguth those tables tilt to get the ball to roll but this looks like magnet is moving the ball trought the table?
-
@bot do you know how much they cost (in which price region?)
There was once a DIY project here: https://reprap.org/forum/read.php?160,813817,page=1 but it died somehow.
-
I have no clue about the price. Most listings I find for "linear motor" are AC induction motors, so totally not what I'm looking for, or they are stepper motors with leadscrew shafts embedded in the rotor. Not at all what I'm after.
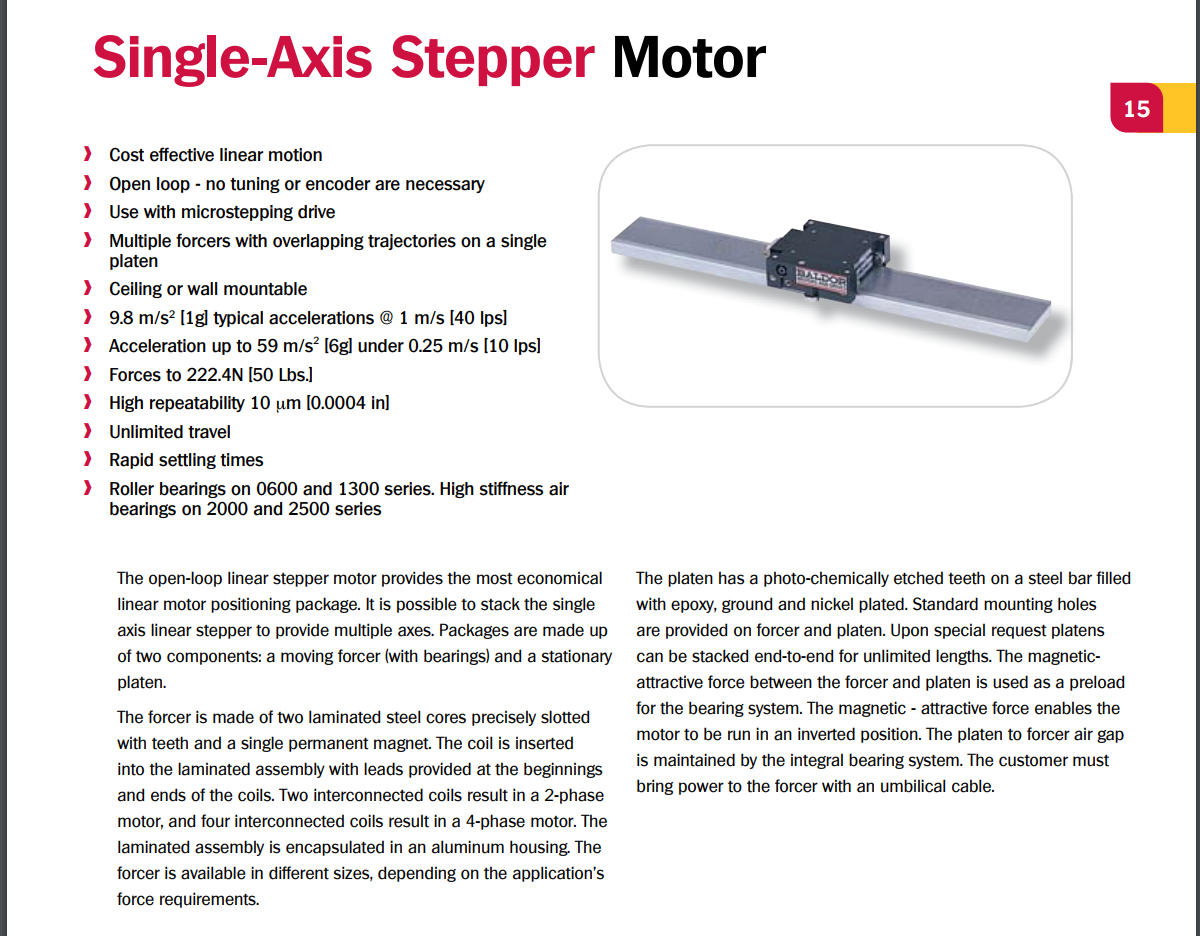
This find, of what seems to be an economical brand of linear STEPPER motor is quite tantalizing. I bet they are still too costly, but the smallest of them seems to be sized right in terms of power, weight, and form factor.
It looks like the forcer that the user took apart (in that RepRap Forum thread) is the same one I am eyeballing. He says it is usually $900. Certainly more than I'd like. But, I wonder how easy it would be to convince chinese manufacturers to drive down the cost -- it's certainly not too hard to make these, especially if they are "hobbyist" grade where the tolerances can be looser to hit a price point.
I can't justify it for any real reason TODAY, but it's something I have in mind for my next printer.
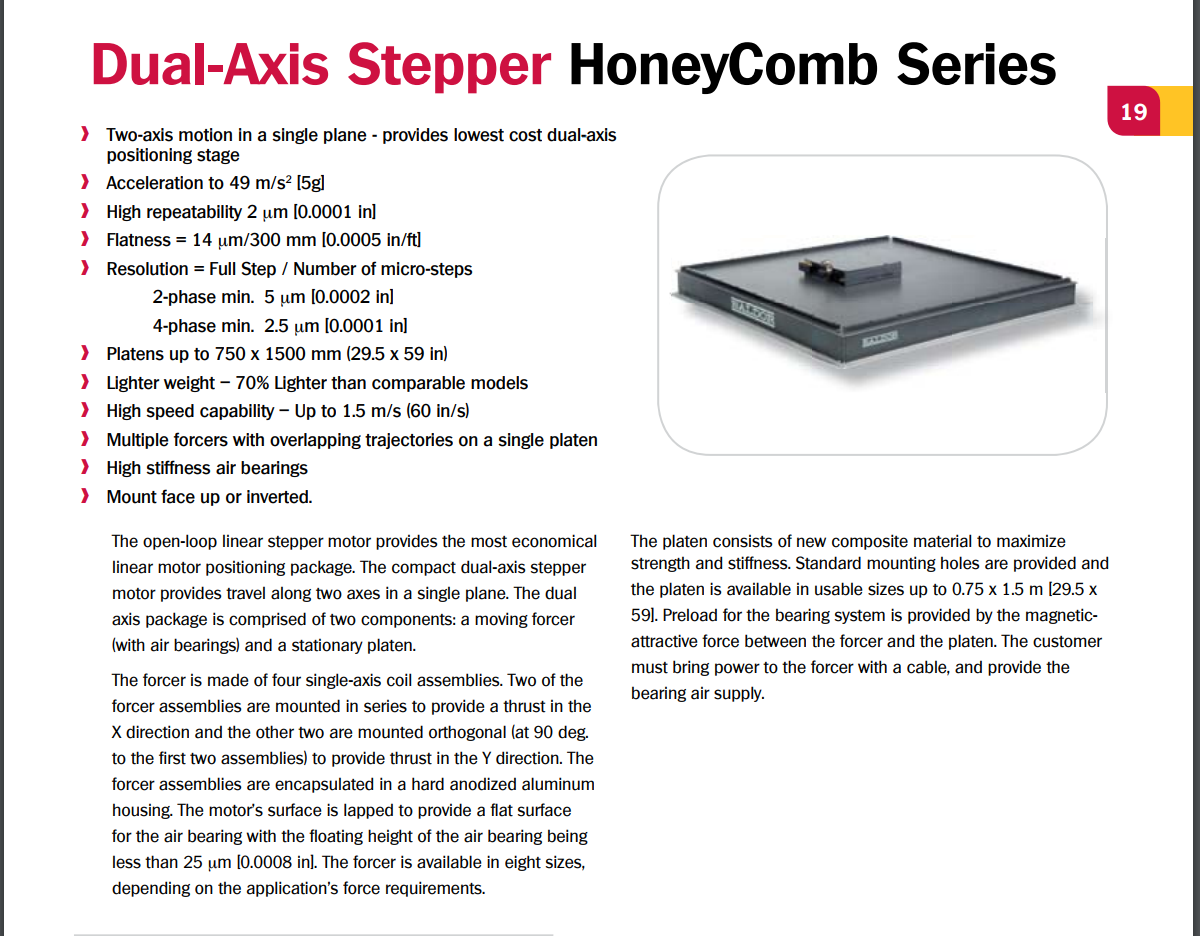
The Dual-Axis one is so intriguing. The drawbacks of it probably outweigh the benefits, though. Which is a shame. Imagine just slapping a hot end on a couple (or more) forcers and just letting them all work at once. They could be working on different parts of the build simultaneously, as long as the toolpath kept the buffer zones in check.
Though, I am not sure how rigid the air bearing is. It's possible that supplementary support from a linear rail or something would be required, which would kinda kill that dream.
The single-axis ones are enticing enough on their own. They can also have multiple forcers per rail/platen. Like Idex, but simplified (no belts, no pulleys).
Interestingly, in that RepRap forum thread, somebody mentions that the ~8.9 N force output of the forcer is not much compared to typical Nema 17 motors. Is that true? It seems the size of the stepper has to grow significantly to drive the same load, when compared to a rotary stepper. Is this a fundamental drawback of the linear motor?
-
@arhi There's a magnet under the table that is moved by a corexy mechanism. I use a 1" cube N52 neodymium magnet and I think the ball is 13 mm diameter. The bottom of the table is 1/2" thick plywood- I overdid that- so the magnet is controlling the ball over >1/2" distance, even at those speeds and accelerations.
I used 16 tooth drive pulleys and have the motors set for 1000 steps per rev. That limits the top safe speed to 1600 mm/sec because of the back emf generated by the motors at 3k rpm. If I use larger drive pulleys it can easily go much faster. I shot a video of it running at 2k mm/sec (3750 rpm) on an erase pattern. The Duet was complaining about overvoltage the whole time, so I won't be running it that fast again without putting in larger drive pulleys.
The sand is sodium bicarbonate sand-blasting medium. At that speed the ball throws the sand around and the sand becomes "thick" so the movement isn't in the straight lines it should be. Everything behaves nicer at the "normal" speed of 500 mm/sec which is about 5-20x faster than people normally run these things. My real-time videos look like other peoples' time lapse videos!
The motors are iHSV-42-40-07-24, 75W, NEMA-17 size integrated servos with 1000 line encoders. More here: https://drmrehorst.blogspot.com/2020/04/the-spice-must-flow-gets-servo-motors.html
The motors are rated for 0.185 Nm torque which translates to 26 oz-in, but servomotor torque ratings aren't holding torque like steppers. Stepper torque drops as speed increases. Servo torque remains almost constant up to the back emf limited speed. I wasn't sure they would have enough grunt to move the mechanism at all, let alone drive it with acceleration of 20k, so I was pleasantly surprised when they did. -
@bot A friend at the makerspace has a pick and place (?) machine that he got at an auction that has some large linear motors set up in an XY arrangement (maybe H-bot)- not sure if they are servos or steppers. He's had the thing sitting in storage for about 3 years and every once in a while he reminds me it's there waiting to be turned into a 3D printer. The drivers and power supplies for the motors are in a box that is bigger than most 3D printers. The machine probably weighs 200-300 kg and the working area is maybe 400 mm square, IRIC. I think it requires 3 phase power. We played with it when he first got it and were able to make the mechanism move a bit using the control panel on the machine, but that's as far as it ever went. here's a picture
-
Wow! Those things are beasts. It seems like linear steppers need to be larger than rotary steppers.
I found this interesting article which describes some benefits and drawbacks of the different types of linear motor. There is a tubular layout that seems interesting.
-
@JoergS5 There may be hope... I contacted the author of that topic in March and they said the linear rails had been sent off to be EDM'd.
@bot I too have been dreaming about using linear motors in a build. I've heard they can sometimes be salvaged from old electric typewriters from the 80's like the Daisy Wheel or Brother EM series. But I don't know if those are suitable for a printer.
-
What I also like very much is the idea to combine air-beared sliding with a solid construction like taking hardstone: https://www.jfa.de/html/en/produkte/p/53/guidances-with-air-beared-slides-ll-s/
-
@bot said in Linear motors: Day Dreaming about future printers.:
Most listings I find for "linear motor" are AC induction motors, so totally not what I'm looking for
That's probably a more practical solution. It should mean that the bar can be a simple steel strip (possibly laminated) with an optical encoder strip mounted on it, instead of needing precisely-milled and epoxy-filled teeth. I think this could be done as a DIY project. Linear encoders can be bought for around $50, see for example https://www.rls.si/en/rlb-linear-component-magnetic-encoder-system.
If it was built as a 2-phase motor, there is a possibility that our upcoming closed loop stepper motor driver could drive it, depending on how much power it needed.
-
@dc42 said in Linear motors: Day Dreaming about future printers.:
@bot said in Linear motors: Day Dreaming about future printers.:
Most listings I find for "linear motor" are AC induction motors, so totally not what I'm looking for
That's probably a more practical solution. It should mean that the bar can be a simple steel strip (possibly laminated) with an optical encoder strip mounted on it, instead of needing precisely-milled and epoxy-filled teeth. I think this could be done as a DIY project. Linear encoders can be bought for around $50, see for example https://www.rls.si/en/rlb-linear-component-magnetic-encoder-system.
If it was built as a 2-phase motor, there is a possibility that our upcoming closed loop stepper motor driver could drive it, depending on how much power it needed.
Very interesting. I will broaden my casual search. I had no idea this would be a viable option, let alone a superior option to the stepper types.
Typically, though, I'm finding very large AC inductor motors, whereas I want something compact with similar force to that generated by a typical motor/pulley/belt arrangement.
Hmm, here we go. Something like this might be suitable in conjunction with the closed-loop duet expansion: https://www.nipponpulse.com/products/motors/motors-linear-servo
-
I remember when I was a teenager, I saw Eric Laithwaite on playing with linear induction motors and magnetic levitation. I got magnetic levitation working - which uses a similar induction principle - but I never got round to building a linear induction motor. I seem to recall that he reckoned transverse flux motors were better than the original longitudinal type, but they were wider.
Thinking about it some more, the stator would be a steel bar faced with fairly thin copper sheet. I think all those years ago, I reckoned that the active bit could be made from laminated steel or ferrite E- or C-cores, which are readily available. You would need to maintain a small air gap between the faces of the cores and the copper face of the stator.
-
I looked into linear steppers for 3D printing about 10 years ago.
I was quoted about $1000 per axis, with a 300mm stroke IIRC. That was at volume too.
Most of the companies making them are aiming for 1 micron repeatability, for machines were $1000 is a small cost.I know of at least 1 person who was working on a low cost linear servo, but he was trying to raise money for it as part of a robotics startup.
You can build something very similar to those NPM linear servos for very little money, the electronics are not super complicated... the hardest part is the control.
With a bit of imagination, you could probably even build a linear stepper in the same style. Thrust output might not be great, but if you can make it a stepper at least control is simple.