stepper precision
-
@fcwilt said in stepper precision:
@arhi said in stepper precision:
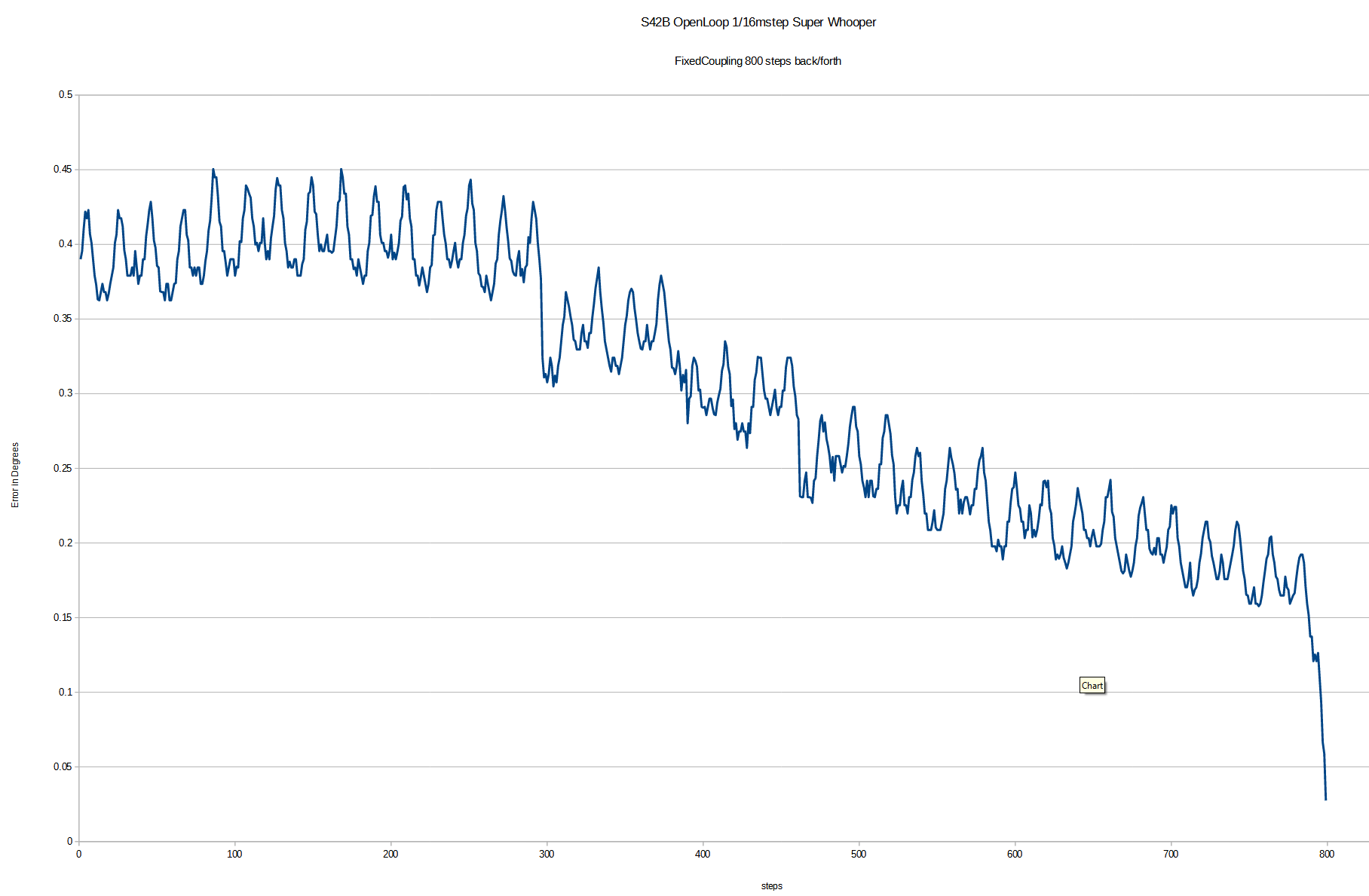
The LCD is not showing errors, the "error" led (lost step) is off .. and 800 steps in forward and then 800 back we have error of 0.75° .. that's HUGE IMHO especially considering 1step/second speed
If you were to configure the stepper (if possible) to only use whole steps would the error go away?
Frederick
with S42B - not that I know ... I'll do as much tests with S42B first (open and closed loop) then moving to 2208 with different motors ... I'll add graphs as I go trough different tests but as you can see it is all rather slow as I'm doing 1step/sec
-
@DaBit said in stepper precision:
That's half a step. I would expect a simple open-loop motor to perform better.
I heard from some ppl S42B is awesome, but from some other I heard they are POS .. so I decided to try them out .. so far I already decided I will not be using them in my projects
On the other hand, I am sure you can interpolate a single rotating magnet with 15 bit resolution, but resolution != precision.
yeah but it does "calibration", moves a circle and records magnet readings at halfsteps I think so the resolution here should help a lot with precision.. but..
-
what I seen on number of reports on-line, open-loop works better than closed loop with S42B

-
That calibration only cancels fixed nonlinearities (and adds stepper imprecision). A slight magnetic short after calibration of changing operating point of the sensor due to temperature is not cancelled.
-
@DaBit said in stepper precision:
That calibration only cancels fixed nonlinearities (and adds stepper imprecision). A slight magnetic short after calibration of changing operating point of the sensor due to temperature is not cancelled.
no clue how these magnet sensors work and what really is the supposed 15 bit precision. I normally deal with optical and mechanical ones, the magnetic ones I used only up to 4bit (for basic rotation)
-
Basically 2 linear magnetic flux sensors oriented with 90 degree rotation. Rotating a magnet over them give a sin and cos signal from which you can calculate the angle.
Works fairly well. But usually not 15-bit well. A resolver would be more accurate.
[edit]
From the datasheet: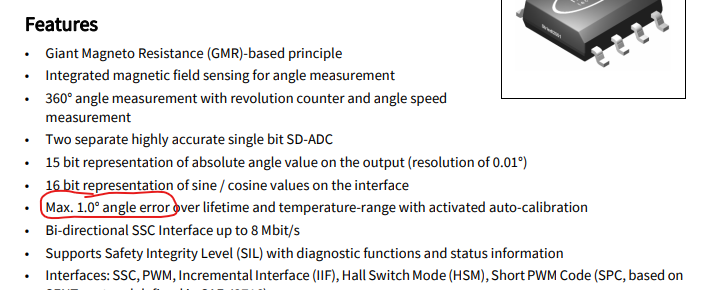
[/edit]So that's 8.5 bits of precision. The extra 6.5 bits of resolution come in handy for the servo loop, but that is not precision.
-
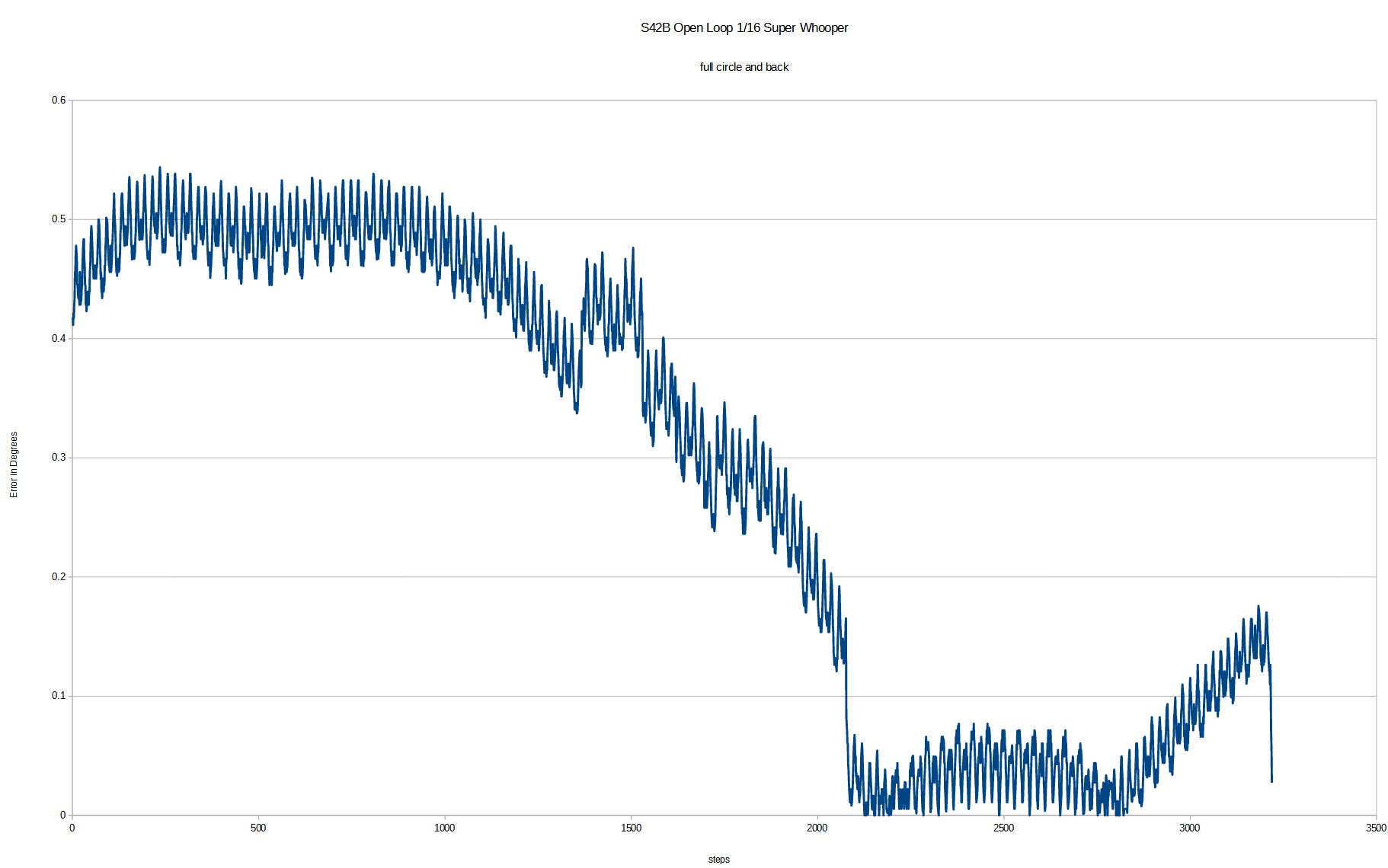
open loop, full circle, S42B
-
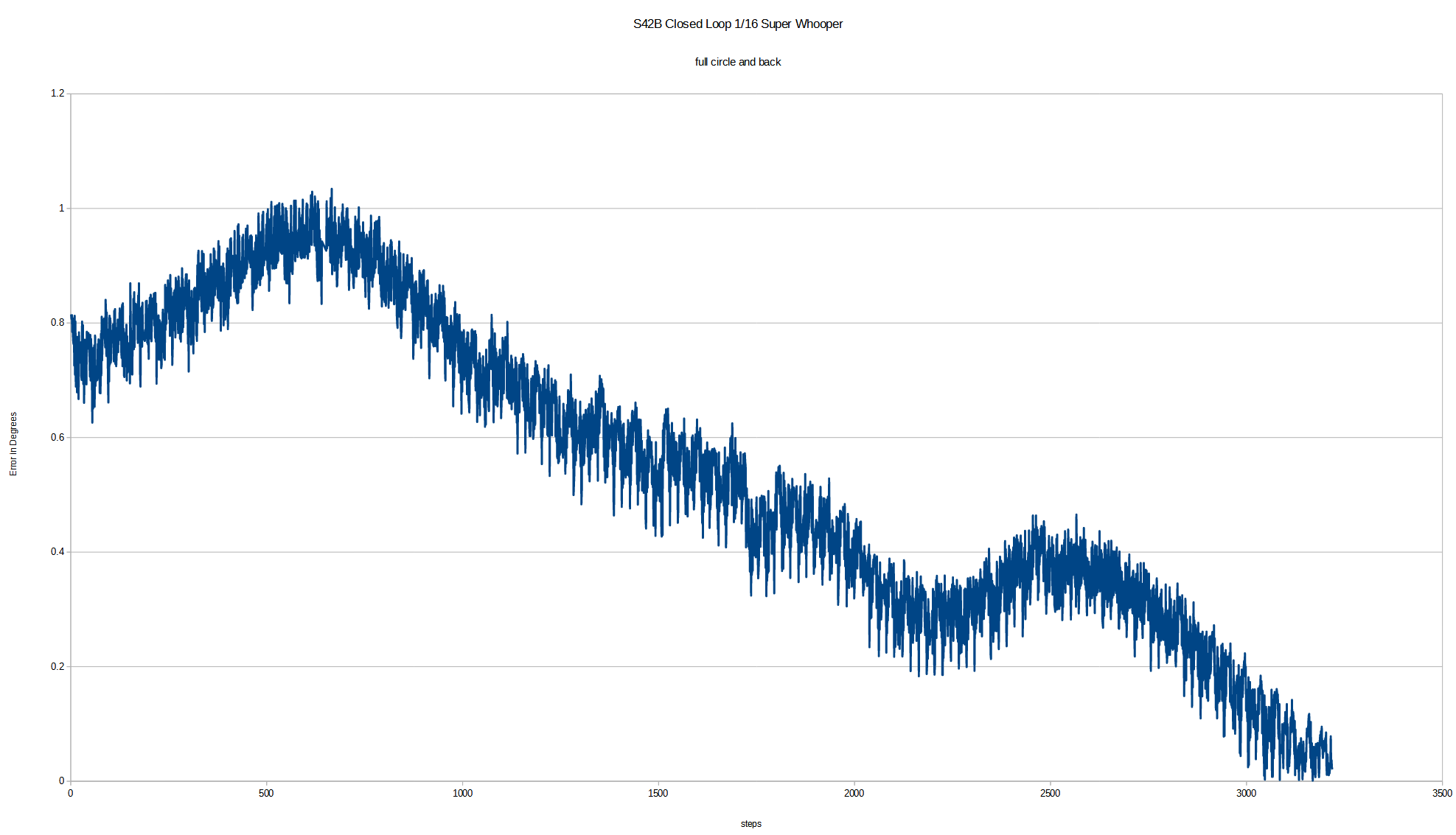
in closed loop mode the S42B display show constantly error between -0.04° to +0.04°
closed loop is running "much" colder than open loop and I doubt it's using full current I configured it to use (can't dig out my current probe to test, no way to get to it now)
-
The closed-loop mode of the S42B is not intended to improve accuracy compared to open-loop mode when the motor load is well below the motor's load limit.
It's intended to improve accuracy when the load intermittently exceeds the maximum motor load.
Try your open-loop vs. closed-loop experiment and hold the rotor with something for 10 steps and see how the closed-loop corrects for that once you remove the load and the open loop mode does not correct the error.
THAT'S what the closed-loop mode is for. It might cost you some accuracy in the step-to-step positioning, but you gain the ability to (when the load is lessened) correct for overload conditions and missed-steps.
Open-loop cannot do that.
SeemeCNC Rostock Max V3 converted to V3.2 with a Duet2 Ethernet Firmware 3.2 and SE300
-
-
@alankilian said in stepper precision:
Try your open-loop vs. closed-loop experiment and hold the rotor with something for 10 steps and see how the closed-loop corrects for that once you remove the load and the open loop mode does not correct the error.
it does correct the missed steps, but it should be also more precise than what I'm seeing
... 1° error !?!? that's more than half a stepAnyhow done with S42B, moving on to TMC2208 driver and different motors
-
Would also be cool if someone can reproduce measurements with S42B as this does not require super good/expensive/high resolution encoder, even cheap 1000 lines encoder should be able to see error 0.5° and 1°
-

-
@arhi said in stepper precision:
Anyhow done with S42B, moving on to TMC2208 driver and different motors
Have you done any testing of the "two piece" closed loop systems consisting of a stepper/encoder and separate control unit?
Thanks.
Frederick
-
@fcwilt said in stepper precision:
Have you done any testing of the "two piece" closed loop systems consisting of a stepper/encoder and separate control unit?
Haven't got to it yet, can't find where I put my vallder stepper with encoder and driver combo. Also I wanna finish with few nema17 before I have to use another mount to test the bigger motor
-
-
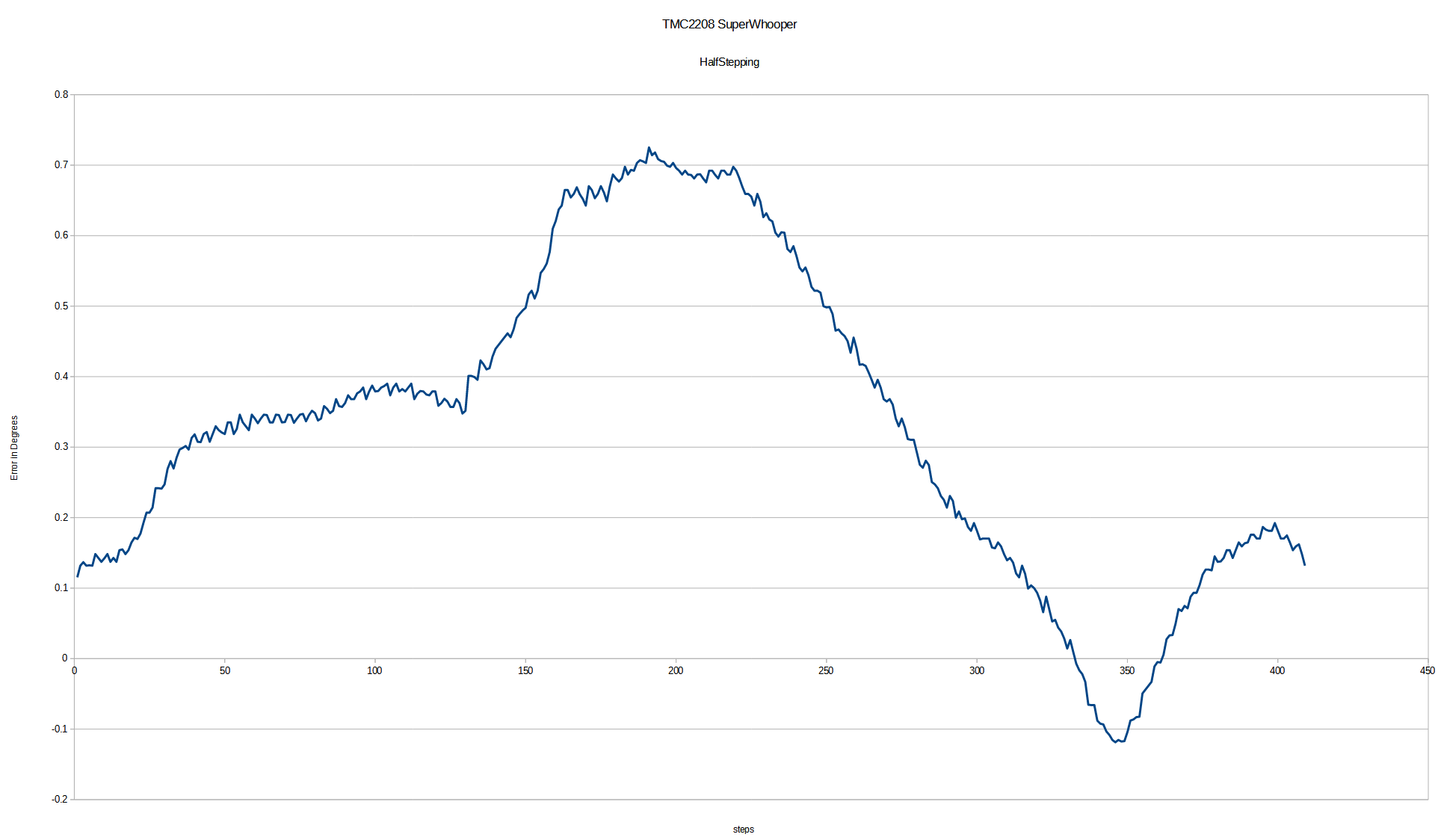
second super whooper
-
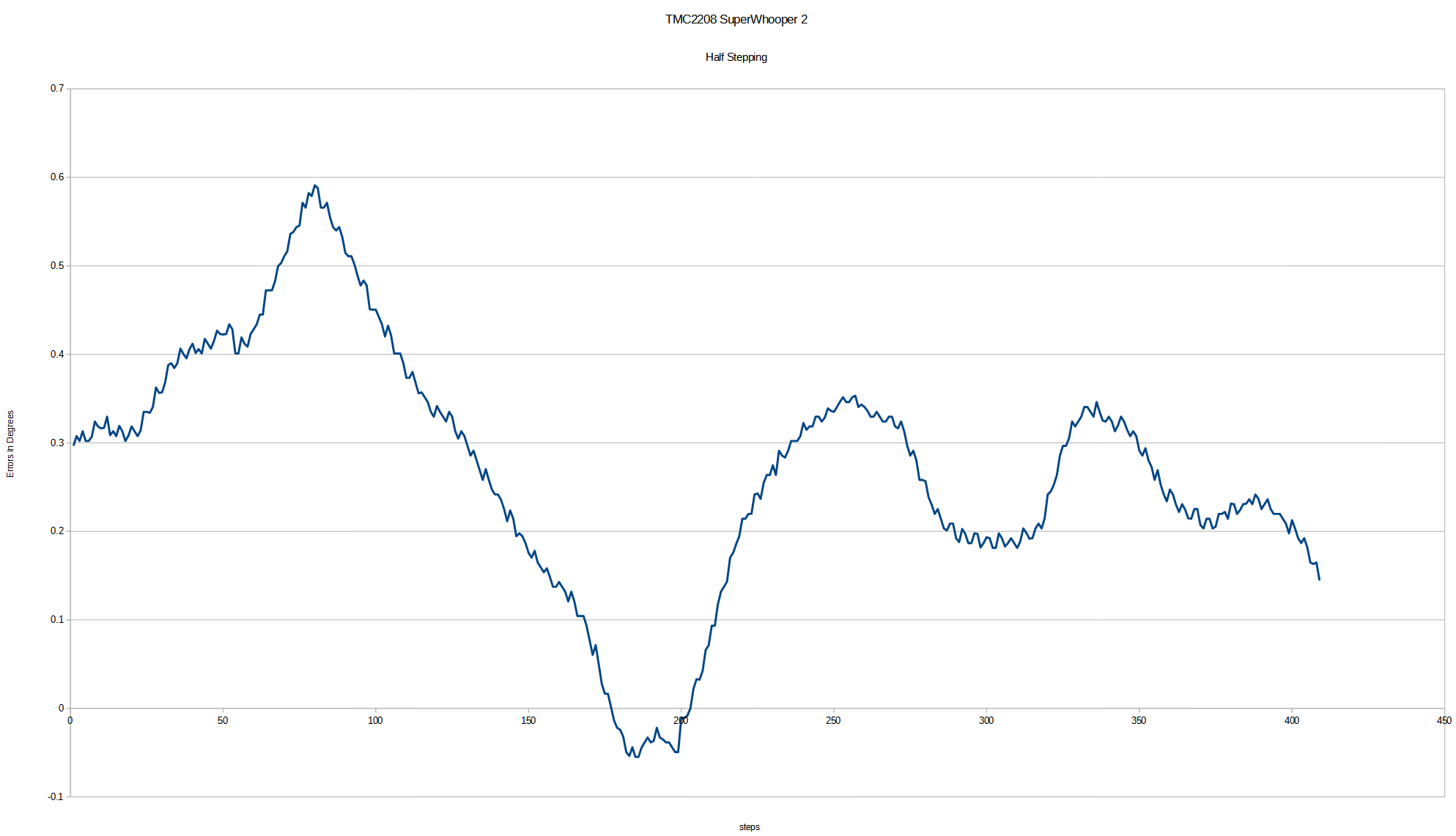
third super whapper motor
-
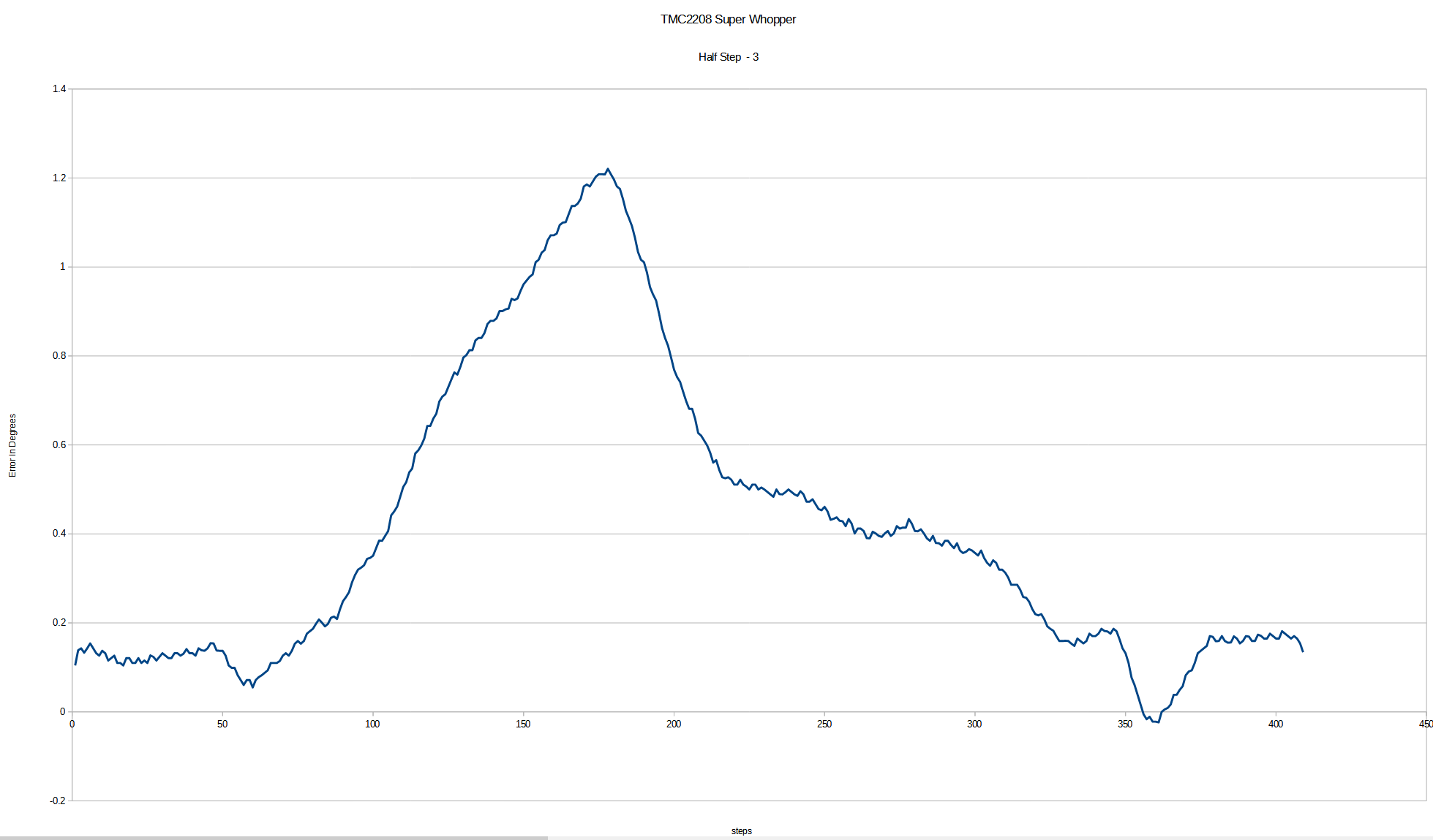
So, basically, at 180 steps or so the actual vs demanded position deviation of the last motor is more than half a step with the others close to that, with zero load?
That is way worse than what I would have expected...
-
@arhi said in stepper precision:
Haven't got to it yet, can't find where I put my vallder stepper with encoder and driver combo. Also I wanna finish with few nema17 before I have to use another mount to test the bigger motor
That's funny.
A while back I purchased such a system for testing but the project got put on hold as other more important things needed to be done.
And now I cannot find it.
Frederick
Printers: a small Utilmaker style, a small CoreXY and a E3D MS/TC setup. Various hotends. Using Duet 3 hardware running 3.4.6