It appears either my old glass plate was warped, or in the process of removing it and installing the mirror I fixed this issue, because a larger print is going right now and the bed ramming seems to be resolved.
Go figure.
It appears either my old glass plate was warped, or in the process of removing it and installing the mirror I fixed this issue, because a larger print is going right now and the bed ramming seems to be resolved.
Go figure.
I just got the new mirrors today, will test them for thermal suitability then give the problematic print another go.
No change in behaviour after running calibration, G29, M500, then starting print. Nozzle hits the bed near the "top left" part of the print, starts to actually rotate the glass bed with it, and even managed to dislodge one of the magnetic arms from the ball before the emergency stop halted the motion and reset the board.
I did not run an M500 immediately after running the mesh grid compensation, no. I wasn't aware that was necessary, I figured it stored that information automatically after it ran. Thanks for the tip on that.
I will run another auto-calibration, then another mesh bed compensation routine, then I will run an M500 and try the print again.
As a side note, is there ever an instance where you would not want to store the results of a calibration or mesh bed routine? Shouldn't that be done automatically (in a macro maybe)?
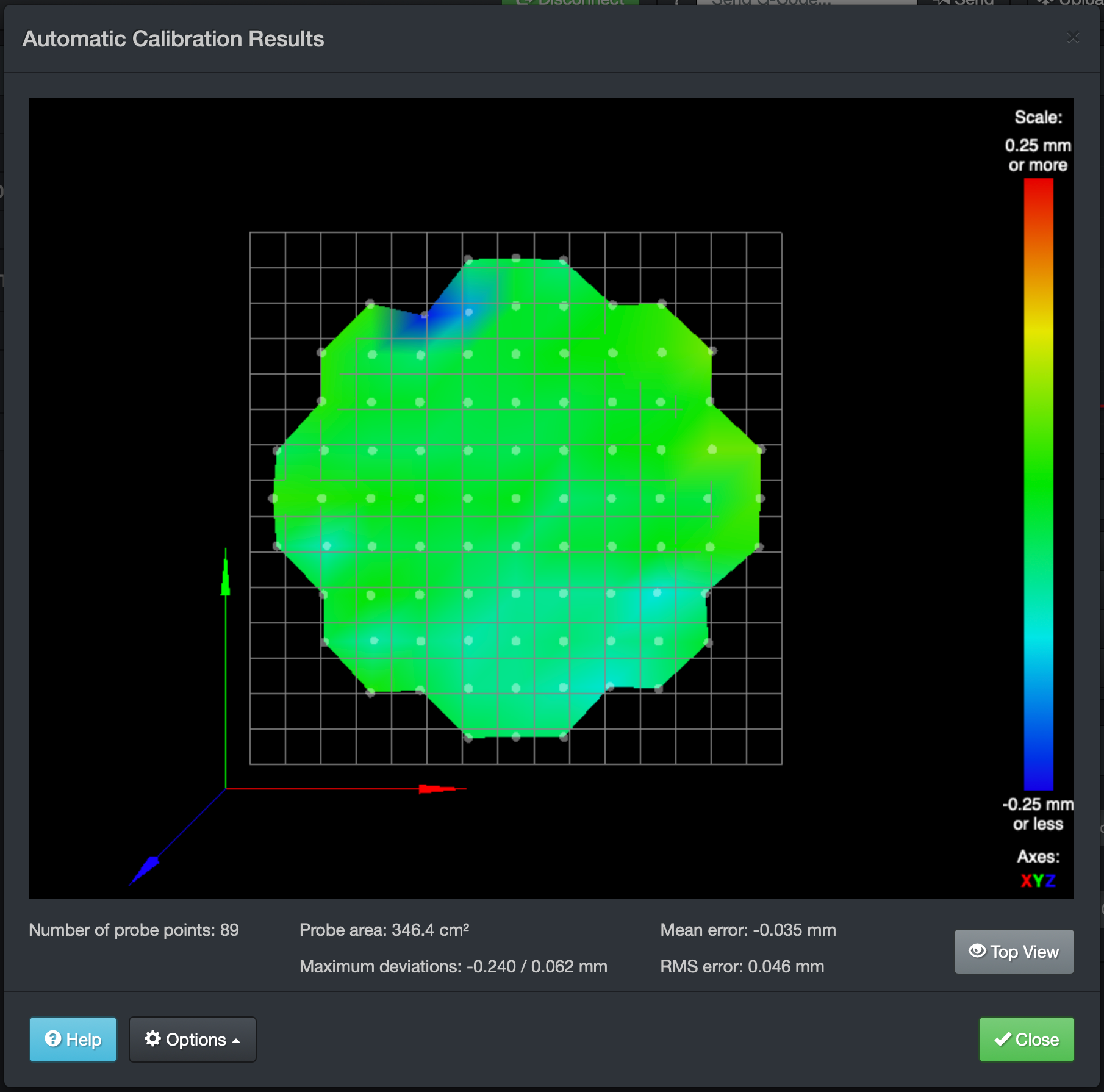
G29
89 points probed, min error -0.240, max error 0.062, mean -0.035, deviation 0.046
@Phaedrux said in Nozzle rams into bed when not near center:
Cura start gcode?
G32 ; auto-calibration
G21 ; metric values
G90 ; absolute positioning
M107 ; start with the fan off
G92 E0 ; zero the extruded length
G1 F4000 E3 ; extrude 3mm of feed stock
G92 E0 ; zero the extruded length again
G1 F{speed_travel}
@Phaedrux said in Nozzle rams into bed when not near center:
Include your homedelta.g and bed.g as well as the out put put M122 and M98 P"config.g" please.
homedelta.g bed.g
M122
=== Diagnostics ===
RepRapFirmware for Duet 2 WiFi/Ethernet version 2.05.1 running on Duet WiFi 1.02 or later
Board ID: 08DGM-917DA-G4MSJ-6JTD6-3S86L-19N7A
Used output buffers: 3 of 24 (6 max)
=== RTOS ===
Static ram: 25712
Dynamic ram: 92664 of which 336 recycled
Exception stack ram used: 392
Never used ram: 11968
Tasks: NETWORK(ready,764) HEAT(blocked,1232) MAIN(running,3816) IDLE(ready,160)
Owned mutexes:
=== Platform ===
Last reset 00:02:19 ago, cause: power up
Last software reset at 2021-01-20 13:59, reason: User, spinning module GCodes, available RAM 11944 bytes (slot 3)
Software reset code 0x0003 HFSR 0x00000000 CFSR 0x00000000 ICSR 0x0441f000 BFAR 0xe000ed38 SP 0xffffffff Task 0x4e49414d
Error status: 0
Free file entries: 10
SD card 0 detected, interface speed: 20.0MBytes/sec
SD card longest block write time: 0.0ms, max retries 0
MCU temperature: min 2.6, current 8.6, max 8.7
Supply voltage: min 12.7, current 12.8, max 13.0, under voltage events: 0, over voltage events: 0, power good: yes
Driver 0: standstill, SG min/max 0/378
Driver 1: standstill, SG min/max 0/391
Driver 2: standstill, SG min/max 0/369
Driver 3: standstill, SG min/max not available
Driver 4: standstill, SG min/max not available
Date/time: 2021-01-20 15:47:44
Cache data hit count 413972580
Slowest loop: 3.60ms; fastest: 0.06ms
I2C nak errors 0, send timeouts 0, receive timeouts 0, finishTimeouts 0, resets 0
=== Move ===
Hiccups: 0, FreeDm: 160, MinFreeDm: 154, MaxWait: 126689ms
Bed compensation in use: none, comp offset 0.000
=== DDARing ===
Scheduled moves: 5, completed moves: 5, StepErrors: 0, LaErrors: 0, Underruns: 0, 0
=== Heat ===
Bed heaters = 0 -1 -1 -1, chamberHeaters = -1 -1
Heater 1 is on, I-accum = 0.0
=== GCodes ===
Segments left: 0
Stack records: 2 allocated, 0 in use
Movement lock held by null
http is idle in state(s) 0
telnet is idle in state(s) 0
file is idle in state(s) 0
serial is idle in state(s) 0
aux is idle in state(s) 0
daemon is idle in state(s) 0
queue is idle in state(s) 0
autopause is idle in state(s) 0
Code queue is empty.
=== Network ===
Slowest loop: 15.46ms; fastest: 0.00ms
Responder states: HTTP(0) HTTP(0) HTTP(0) HTTP(0) FTP(0) Telnet(0) Telnet(0)
HTTP sessions: 1 of 8
- WiFi -
Network state is running
WiFi module is connected to access point
Failed messages: pending 0, notready 0, noresp 0
WiFi firmware version 1.23
WiFi MAC address 60:01:94:2e:12:42
WiFi Vcc 3.38, reset reason Turned on by main processor
WiFi flash size 4194304, free heap 23648
WiFi IP address 192.168.1.36
WiFi signal strength -55dBm, reconnections 0, sleep mode modem
Socket states: 0 0 0 0 0 0 0 0
M98 P"config.g"
HTTP is enabled on port 80
FTP is disabled
TELNET is disabled
Have you seen these?
https://duet3d.dozuki.com/Wiki/Calibrating_a_delta_printer
https://duet3d.dozuki.com/Wiki/ConfiguringRepRapFirmwareDeltaPrinter
I have read them and followed them, yes.
...I'm ready to pull out whatever is left of my hair over this.
I've been slowly working on my converted Anycubic Kossel Linear Plus printer over the past 12 months or so, putting in a Duet WiFi board, Haydn's magnetic arms, a Duet Smart Effector, and a borosilicate glass plate (among other rebuild items).
The issue I'm having now is that I can print small objects (20mm calibration cube, 3D Benchy, etc.) without major problems and they look great. But once I print anything that is larger and requires travel any considerable distance away from the center of the plate, the nozzle drags against the glass and I have to emergency stop the printer to avoid damage.
I have auto-calibration included in the start G-Code in Cura for each print, and I do not have an auto-home set after that. My bed is almost perfectly level, I have a bubble level that, when placed on various parts of the plate, reads the same at each position. Also, it looks the same (the same amount of almost perfectly level) when placed atop the Smart Effector, bubble is in the same place.
I have performed Z trigger height calibration with paper at 5 points on the bed (X0/Y0, X100/Y100, X-100/Y100, X100/Y-100, and X-100/Y-100), and they're all within 0.1mm of each other, but I'm not sure how to take that variance into account in G-Code (or if I need to at all).
I took a speed square and checked for warping on the glass plate, and there doesn't appear to be any of that going on, but just in case, I've ordered some mirrors that are due to arrive tomorrow and I will try those to see if that changes anything.
The magnetic arms are all within 0.02mm of each other in length, 304.12mm-304.14mm.
I'm going to post my config files in the hopes that I have made some obvious, boneheaded mistake, but I'm starting to wonder if this thing will ever work. Any advice on what to check next or tweak would be very much appreciated. At this point, I feel equally like I could be one tweak away or completely turned around, I just don't know.
@droftarts I didn’t change much, and let calibration do the rest:
M665 L304.130 R134.638 H203.589 B105.0 X-0.477 Y-0.304 Z0.000
The first few layers look fantastic, so this particular hurdle has been overcome, thanks to both of you for your advice. Now it appears I have some cooling issues, I think my new fan is not strong enough, so time to address that, but the calibration and first layer is fantastic now.
Thanks!
@dc42 Yes, I've done so, and a benchy is printing as we speak. Thanks so much to you and @droftarts for the info, things appear to be running smoothly now. We'll see how HMS FantasticPlastic looks in a bit here!
So my height is now, indeed, 198.60mm. These are 304mm arms, and the stock Anycubic ones were quite a bit shorter, so that's definitely a factor.
@dc42 Your suggestion to alter the plunge height helped, and I think that leaving the other settings the same as before and letting the bot do the maths is the way to go. Especially since I will now run an automatic calibration before every print.
The new rods are substantially longer than my old ones, so I’m fairly sure my measured height isn’t too far off. I may very well have screwed up the other measurements, I will roll back and change only one at a time and see what that gets me.
Thanks!
I've gone through the steps at https://duet3d.dozuki.com/Wiki/Calibrating_a_delta_printer to try to dial in my height settings correctly, and the probe triggers just fine during single-tap testing, but running a delta calibration (using a Duet 2 WiFi) the head drops, stops a few mm above the bed, then diagonally dives into the bed and crashes (as opposed to moving parallel to the bed, then dropping to probe, like it should).
I've entered my new magrod lengths into config.g, and put my best measurement for radius and height in as well. Feels like I'm really close to getting this up and running, just need to get a calibration to run properly.
Any thoughts?
Posting this for anyone else who gets to step 6 of the smart effector assembly and, like me goes, "well sh*t, this heat break isn't going to work at all." Do yourself a favor and order up an E3D-compatible heat break, US$14.99 on Amazon.
Wish me luck! I'm excited to see how this goes!
@Danal Thanks, I actually used your blog to install my Duet, it made the process much, much easier (and a lot less scary).
I have read through that wiki page a few times, I just wanted to get confirmation from anyone who has been in a similar situation that one does, indeed, need to slice and dice some wiring to perform this upgrade.
Thanks!