@droftarts
Ian thank you very much!
Problem solved

Latest posts made by ELAD
-
RE: Upgrading from 3.5.2 to 3.5.4 - Help requestposted in Firmware installation
-
Upgrading from 3.5.2 to 3.5.4 - Help requestposted in Firmware installation
Hello,
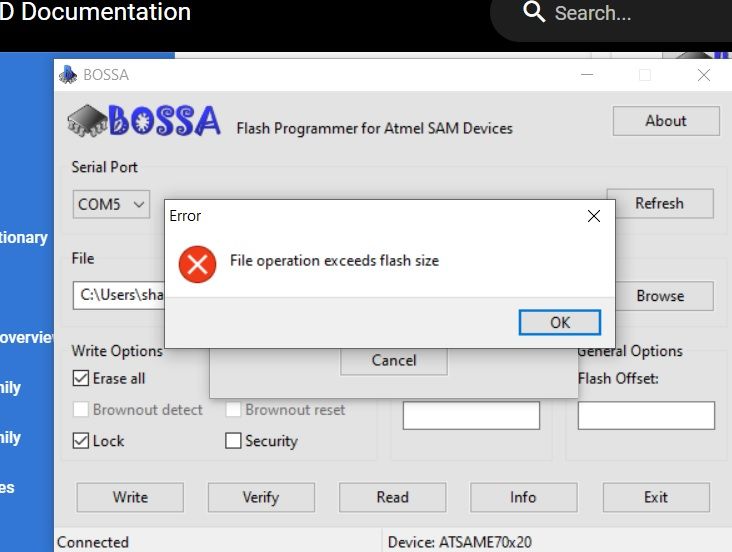
I tried to upgrade the firmware version from 3.5.2 to 3.5.4 by uploading the zip file through the web interface. After that, the board became unresponsive. I walked through the fallback procedures, but I couldn't achieve success
The board is 6HC 1.02
.
Appreciate any help
-
RE: ODrive S1 + Duet3 XDposted in Third-party add-ons
Hi Tony,
I will try to move the jumper later today. Thank you.
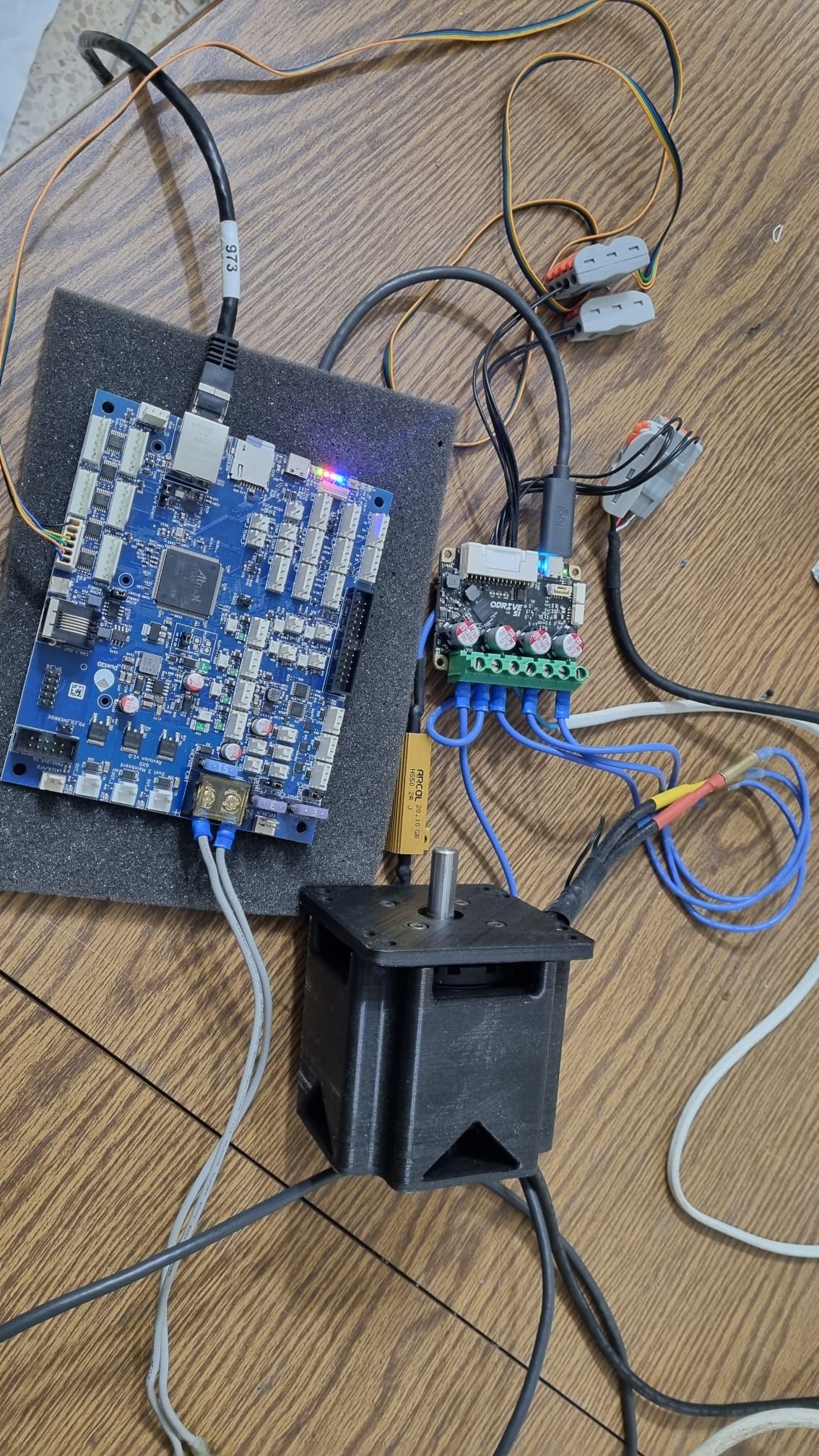
Here is my current wiring:
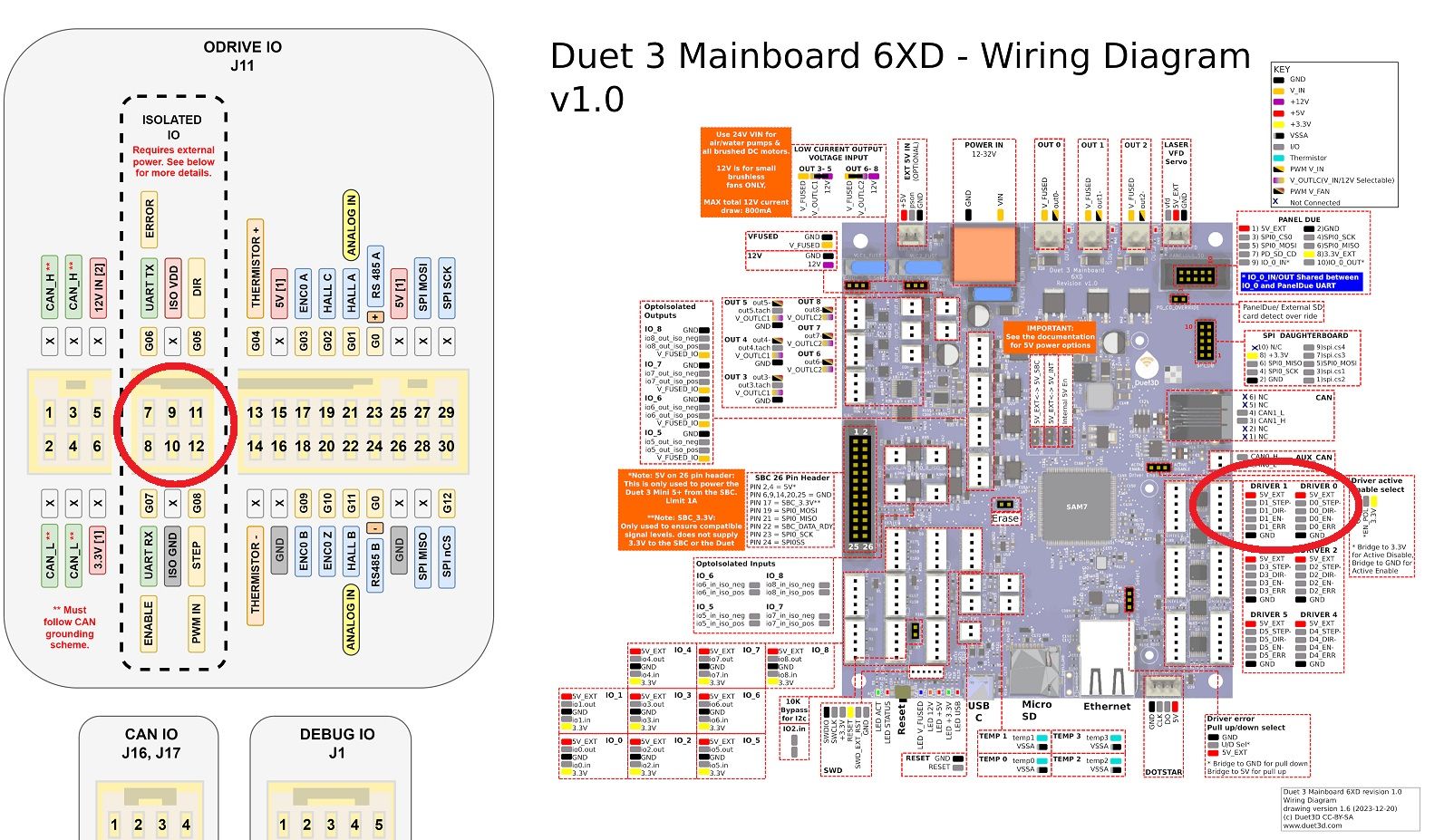
5V - 9
STEP - 12
DIR - 11
EN - 8
ERR - Disconnected for now
GND - 10There is no parallel connection between the pins like it should be done for an external stepper driver. I've connected each one to the corresponding port on the Odrive S1. Is it might be the issue?
-
RE: ODrive S1 + Duet3 XDposted in Third-party add-ons
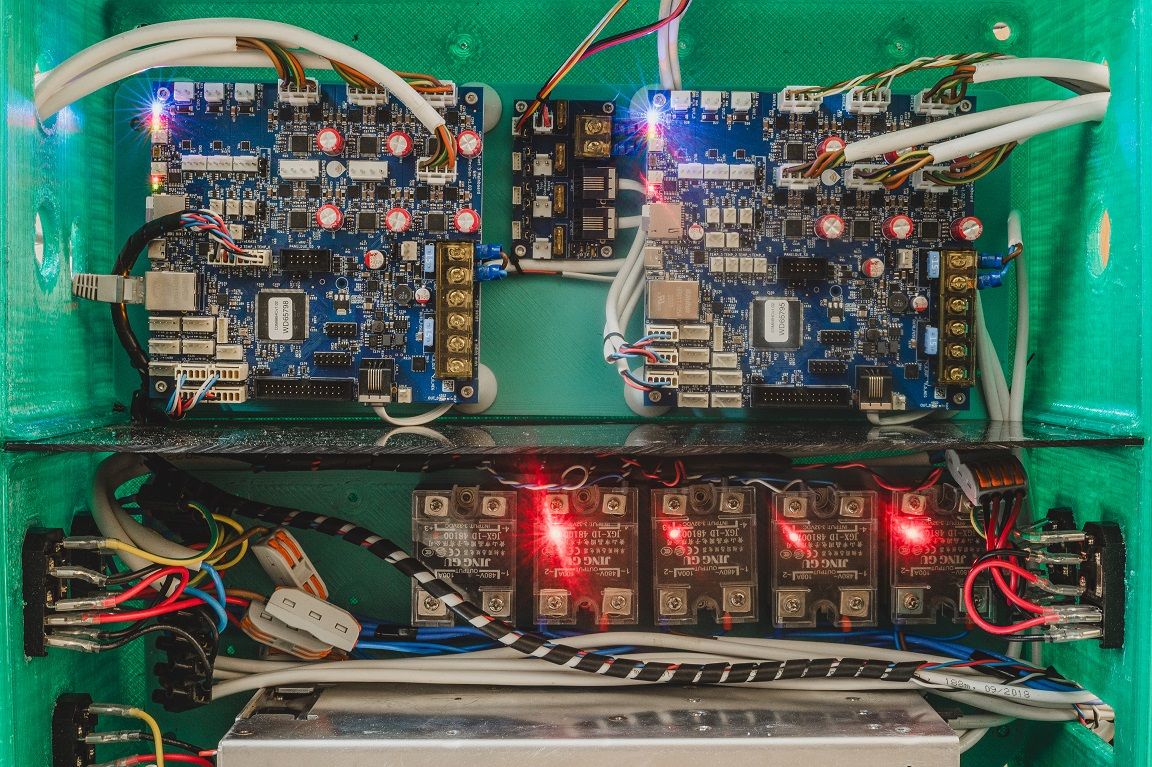
Should the wiring be the same as for an external stepper driver, like in the following photos?
photos -
ODrive S1 + Duet3 XDposted in Third-party add-ons
I would appreciate any guidelines regarding wiring and configuring Duet3 XD v1.0 to work with Odrive S1.
The S1 is fully configured and the motor spins to commands sent through the Odrive web GUI.
Any reference or information regarding wiring (dir, step) and config.g changes would be highly appreciated.
If any further info is required, please let me know.
https://docs.odriverobotics.com/v/latest/hardware/s1-datasheet.html; General preferences G4 S2 M575 P1 S1 B57600 ; enable support for PanelDue G90 ; absolute coordinates M83 ; relative extruder moves M550 P"ShlomitO" ; printer name ;M404 N1.75 ; filament diameter ; ; Network M552 S1 ; enable network and acquire dynamic address via DHCP M586 P0 S1 ; enable HTTP M586 P1 S0 ; disable FTP M586 P2 S0 ; disable Telnet ; ; Drives ; 24V M569 P0.0 S1 ; physical drive 0.0 Duet3-6HC Z left front M584 X0.0 ; set drive mapping M350 X16 I0 ; configure microstepping with interpolation M92 X100.00 ; set steps per mm M566 X900.00 P1 ; set maximum instantaneous speed changes (mm/min) M203 X9000000.00 ; set maximum speeds (mm/min) M201 X900000.00 ; set accelerations (mm/s^2) ;M204 T2000 P2000 ; set accelerations (mm/s^2) ;M906 X2200 Y4000 E1000 I19 ; set motor currents (mA) and motor idle factor in per cent M564 H0 S0 M84M122 === Diagnostics === RepRapFirmware for Duet 3 MB6XD version 3.5.1 (2024-04-19 14:39:48) running on Duet 3 MB6XD v1.0 (standalone mode) Board ID: 08DLM-956DA-M24S4-7J9F0-3S46N-1VLUS Used output buffers: 1 of 40 (18 max) === RTOS === Static ram: 153624 Dynamic ram: 117604 of which 0 recycled Never used RAM 74764, free system stack 198 words Tasks: NETWORK(1,ready,32.8%,183) ETHERNET(5,nWait 7,0.1%,121) HEAT(3,nWait 6,0.0%,368) Move(4,nWait 6,0.0%,335) CanReceiv(6,nWait 1,0.0%,940) CanSender(5,nWait 7,0.0%,334) CanClock(7,delaying,0.0%,338) MAIN(1,running,66.9%,444) IDLE(0,ready,0.1%,30), total 100.0% Owned mutexes: === Platform === Last reset 00:02:59 ago, cause: software Last software reset at 2024-04-21 18:48, reason: User, Gcodes spinning, available RAM 106724, slot 1 Software reset code 0x0003 HFSR 0x00000000 CFSR 0x00000000 ICSR 0x00400000 BFAR 0x00000000 SP 0x00000000 Task MAIN Freestk 0 n/a Error status: 0x00 Aux0 errors 0,0,0 MCU temperature: min 39.2, current 40.7, max 40.9 Supply voltage: min 23.8, current 23.9, max 23.9, under voltage events: 0, over voltage events: 0, power good: yes 12V rail voltage: min 12.1, current 12.2, max 12.3, under voltage events: 0 Heap OK, handles allocated/used 0/0, heap memory allocated/used/recyclable 0/0/0, gc cycles 0 Events: 0 queued, 0 completed Driver 0: ok Driver 1: ok Driver 2: ok Driver 3: ok Driver 4: ok Driver 5: ok Date/time: 2024-04-21 19:48:10 Slowest loop: 9.48ms; fastest: 0.07ms === Storage === Free file entries: 20 SD card 0 detected, interface speed: 25.0MBytes/sec SD card longest read time 2.4ms, write time 0.0ms, max retries 0 === Move === DMs created 125, segments created 0, maxWait 0ms, bed compensation in use: none, height map offset 0.000, max steps late 0, min interval 0, bad calcs 0, ebfmin 0.00, ebfmax 0.00 no step interrupt scheduled Moves shaped first try 0, on retry 0, too short 0, wrong shape 0, maybepossible 0 === DDARing 0 === Scheduled moves 0, completed 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1 === DDARing 1 === Scheduled moves 0, completed 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1 === Heat === Bed heaters -1 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1, chamber heaters -1 -1 -1 -1, ordering errs 0 === GCodes === Movement locks held by null, null HTTP is idle in state(s) 0 Telnet is idle in state(s) 0 File is idle in state(s) 0 USB is idle in state(s) 0 Aux is idle in state(s) 0 Trigger is idle in state(s) 0 Queue is idle in state(s) 0 LCD is idle in state(s) 0 SBC is idle in state(s) 0 Daemon is idle in state(s) 0 Aux2 is idle in state(s) 0 Autopause is idle in state(s) 0 File2 is idle in state(s) 0 Queue2 is idle in state(s) 0 Q0 segments left 0, axes/extruders owned 0x0000000 Code queue 0 is empty Q1 segments left 0, axes/extruders owned 0x0000000 Code queue 1 is empty === CAN === Messages queued 896, received 0, lost 0, errs 847194, boc 0 Longest wait 0ms for reply type 0, peak Tx sync delay 0, free buffers 50 (min 50), ts 896/0/0 Tx timeouts 0,0,895,0,0,0 last cancelled message type 30 dest 127 === Network === Slowest loop: 9.37ms; fastest: 0.03ms Responder states: MQTT(0) HTTP(0) HTTP(0) HTTP(0) HTTP(0) HTTP(0) HTTP(0) FTP(0) Telnet(0) Telnet(0) HTTP sessions: 1 of 8 = Ethernet = Interface state: active Error counts: 0 0 0 0 0 0 Socket states: 5 2 2 2 2 0 0 0 === Multicast handler === Responder is inactive, messages received 0, responses 0 -
RE: SZP + two mainboardsposted in Duet Hardware and wiring
@dc42 Thank you for replying.
It is a large-format printer. The cable from the electronic box to the tool head is more than 3m.
What should I do in that case? -
SZP + two mainboardsposted in Duet Hardware and wiring
Hello,
I would appreciate any guidance regarding the CAN connection of SZP to a present setup of two MB6HC 1.02, including a tool distribution board (because a tool board 1LC was connected as well, but I removed it.)
Should I desolder and remove the CAN termination resistors on the board used as an expansion, then loop on the CAN wire and connect them to the SZP, not forgetting to solder its jumper on the back to set the termination resistor?Thank you,
-
RE: BL-Touch doesn't work via Tool Board V1.0posted in General Discussion
@jay_s_uk
Thank you very much. The wiring indeed was the issue. I am a bit embarrassed I couldn't notice it.
-
RE: BL-Touch doesn't work via Tool Board V1.0posted in General Discussion
@jay_s_uk
The tool board functions perfectly except for the BL-Touch. -
BL-Touch doesn't work via Tool Board V1.0posted in General Discussion
Hello,
The BL-Touch doesn't light its LEDs and does not obey any Gcode commands.
I can see on the DWC it changes from P1000 to P0 when physically connected, but that's it.Here is the relevant part of the config.g
; Z-Probe___________________________________________________________ M950 S0 C"20.io0.out" ; create servo pin 0 for BLTouch M558 P9 C"20.io0.in" H5 F120 T90000 ; set Z probe type to bltouch and the dive height + speedsand here is M122 B20
M122 B20 Diagnostics for board 20: Duet TOOL1LC rev 1.0 or earlier firmware version 3.4.6 (2023-07-21 14:17:33) Bootloader ID: SAMC21 bootloader version 2.4 (2021-12-10) All averaging filters OK Never used RAM 3636, free system stack 88 words Tasks: Move(notifyWait,0.0%,155) HEAT(notifyWait,0.2%,115) CanAsync(notifyWait,0.0%,65) CanRecv(notifyWait,0.0%,76) CanClock(notifyWait,0.0%,65) TMC(delaying,3.0%,57) MAIN(running,91.9%,351) IDLE(ready,0.0%,40) AIN(delaying,4.9%,142), total 100.0% Last reset 00:25:19 ago, cause: software Last software reset data not available Driver 0: pos 0, 492.5 steps/mm,standstill, SG min 0, read errors 0, write errors 1, ifcnt 71, reads 38733, writes 12, timeouts 0, DMA errors 0, CC errors 0, steps req 0 done 0 Moves scheduled 0, completed 0, in progress 0, hiccups 0, step errors 0, maxPrep 0, maxOverdue 0, maxInc 0, mcErrs 0, gcmErrs 0 Peak sync jitter 0/4, peak Rx sync delay 213, resyncs 0/0, no step interrupt scheduled VIN voltage: min 24.0, current 24.0, max 24.0 MCU temperature: min 38.1C, current 38.3C, max 38.7C Last sensors broadcast 0x00000002 found 1 72 ticks ago, 0 ordering errs, loop time 0 CAN messages queued 30404, send timeouts 0, received 13695, lost 0, free buffers 37, min 37, error reg 0 dup 0, oos 0/0/0/0, bm 0, wbm 0, rxMotionDelay 0 Accelerometer: none I2C bus errors 4493, naks 4493, other errors 4493I would appreciate any support, if further info is required, please let me know,
Thank you all