@Sindarius any news on that? In the meantime i moved my script to inkscape that has advanced scripting functionality and i can convert all the curves to lines so I don't have issues.
Posts made by MikeS
-
RE: G-code Viewer G2/G3 arc previewposted in Duet Web Control
-
RE: G-code Viewer G2/G3 arc previewposted in Duet Web Control
@Sindarius said in G-code Viewer G2/G3 arc preview:
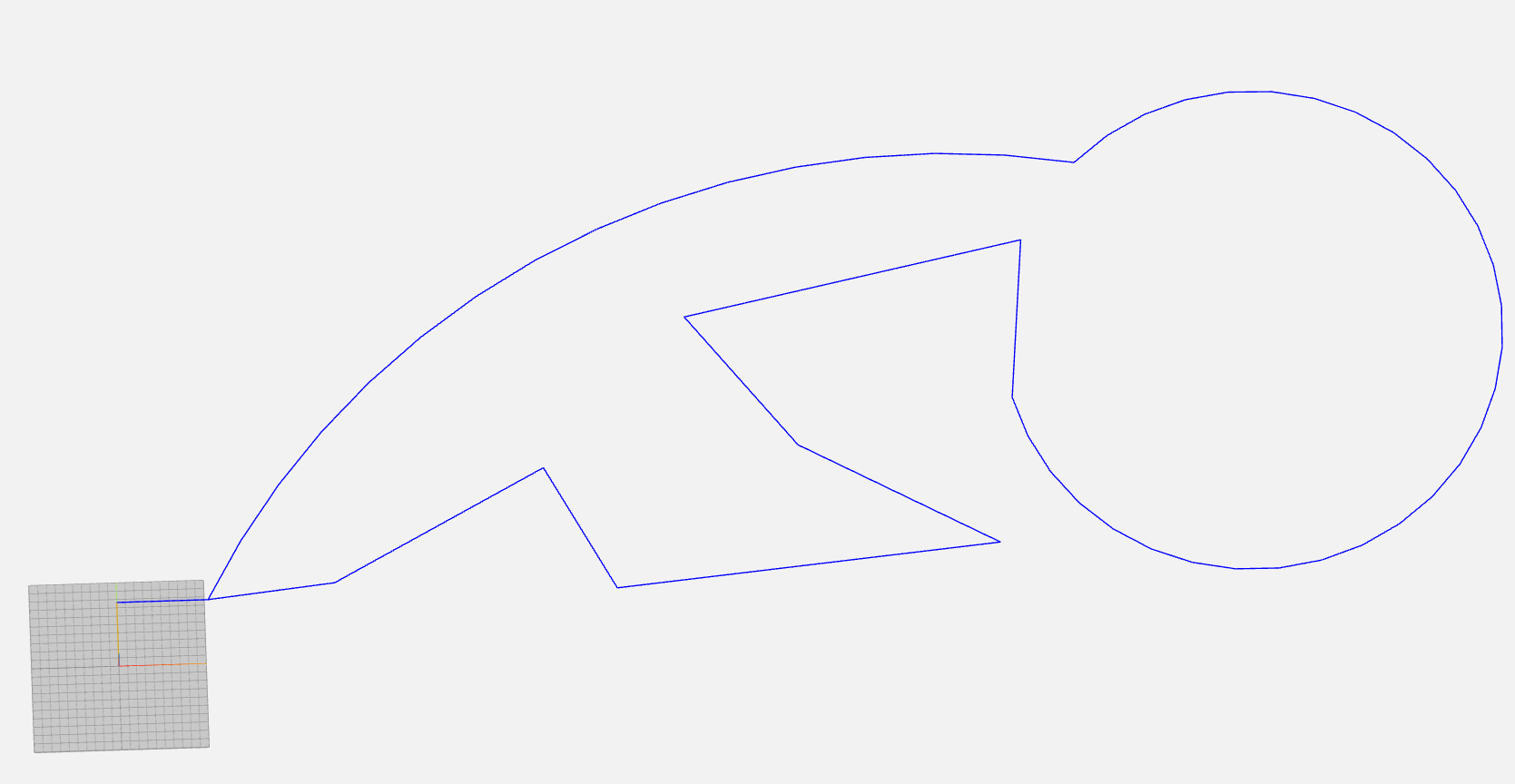
@MikeS I'll need to take a deeper look into what is going on with the viewer but it is upset with the U and V params. If you remove them the rendered matches NCViewer.
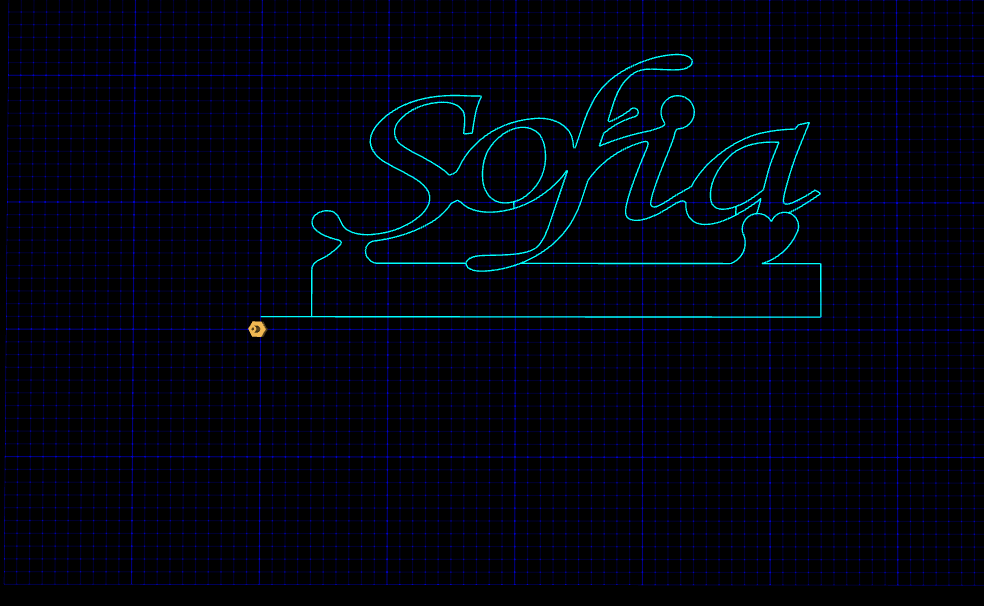
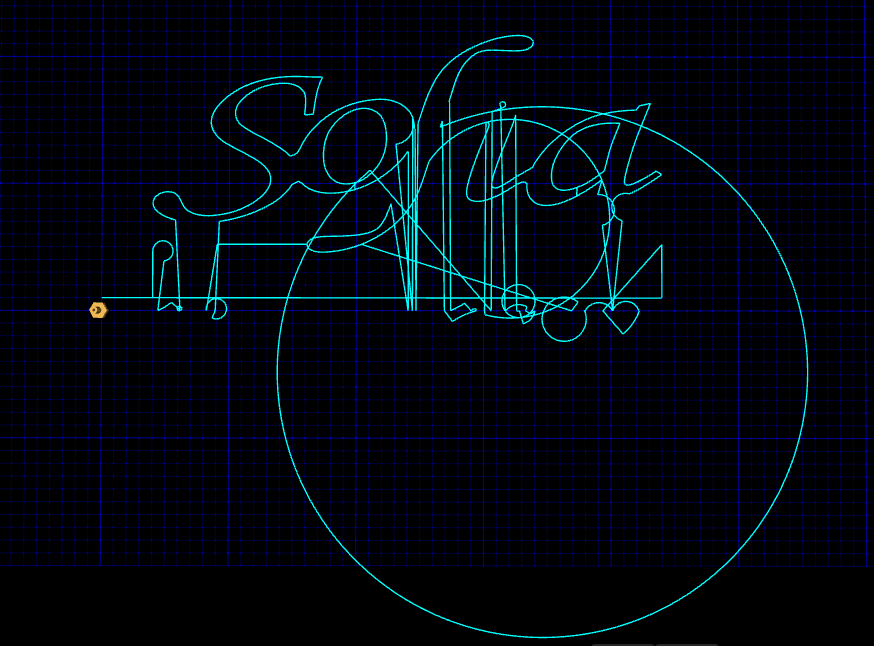
I can confirm that code without U and V axis is previewing fine. I attach a more elaborated g-code with more arcs that works well with only X and Y but causes a lot of problems for the preview if U and V are present. I hope this can help you troubleshoot the problem and test a future fix. Unfortunately arcs are not so common on current slicers.
X and Y only
Sofia 2Axis.g
X,Y,U and V
Sofia 4Axis.g
-
RE: G-code Viewer G2/G3 arc previewposted in Duet Web Control
M115 FIRMWARE_NAME: RepRapFirmware for Duet 2 WiFi/Ethernet FIRMWARE_VERSION: 3.4.6 ELECTRONICS: Duet WiFi 1.02 or later FIRMWARE_DATE: 2023-07-21 14:08:28 Duet Web Control 3.4.6 -
RE: G-code Viewer G2/G3 arc previewposted in Duet Web Control
@Sindarius nice! When i get back from work i'll try to export some gcodes without the u and v axes. I'll get back with the results.
-
RE: G-code Viewer G2/G3 arc previewposted in Duet Web Control
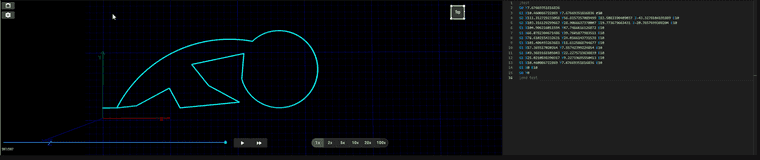
@MJLew thank you for the feedback. The second image is the same gcode as posted previewed in dwc. I saw the same behaviour with other tests when g2 and g3 are used. The arcs does not always start from the correct point and linear movement are shown.
I tried launching "print" without motors connected and the extruder in the simulation seems to follow the correct path altought it is difficult to reliably say it because arc are not previewed. However these added lines are not followed for sure so i really think that it is the viewer that is not showing the correct path or my codes are somewhat correctly iterpreted by duet firmware and ncviewer but not from the preview. -
G-code Viewer G2/G3 arc previewposted in Duet Web Control
Hi all,
i'm facing some issues in previewing own made g-code for a cnc foam cutting machine i'm making.Machine is made of 4 axis named X,Y,U,V. X is right X carriage, Y is right Y carriage, U is X left carriage and V is left Y carriage. Between the carriage there is a hotwire that i use for cutting foam.
I've written a small Autocad macro for outputting custom G-Code from a closed polyline to allow machine control. Since now i've used https://ncviewer.com/ for checking the output g-code and bugfixing the macro.
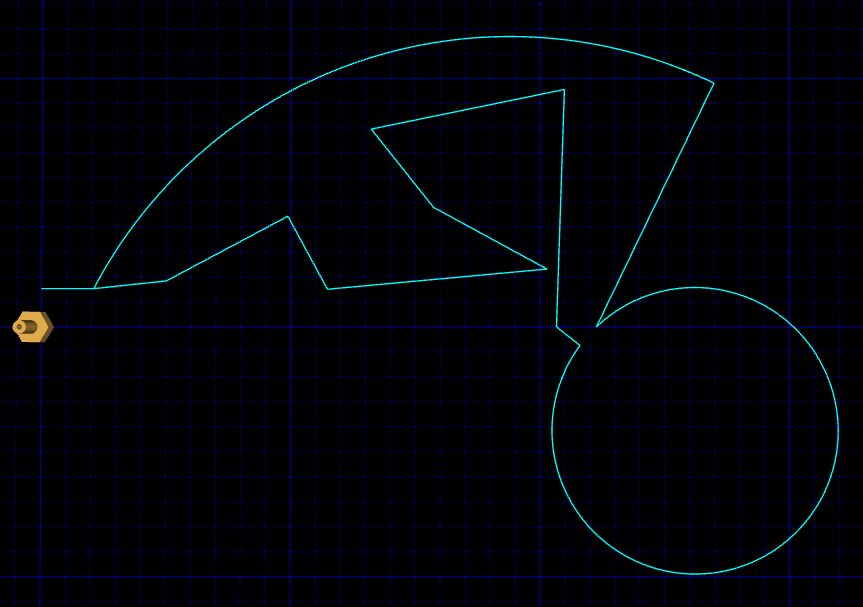
Now i've tried uploading a sample code to DWC and preview it. The result is different from what i would have expected and from what the ncviewer is showing. Anyone could replicate it? i'm doing something wrong? X Y U V and I,J values seems to be correct checking them against cad drawing.PS: i didn't run the code on the machine so i still don't now if this is only related to the preview or to the duet motion too.
I attach here the result and the gcode:
Gcode:
G0 Y7.67669351816836 V7.67669351816836 G1 X10.460086722869 Y7.67669351816836 U10.460086722869 V7.67669351816836 G2 X111.312729233058 Y56.8157257089499 U111.312729233058 V56.8157257089499 I83.5083390409037 J-43.3278104191889 G2 X103.316129299667 Y28.9066637370007 U103.316129299667 V28.9066637370007 I19.773679663431 J-20.7657599308204 G1 X104.906216011594 Y47.7466616126872 U104.906216011594 V47.7466616126872 G1 X66.0782304671486 Y39.7601877983511 U66.0782304671486 V39.7601877983511 G1 X78.6102154332631 Y24.0166143731538 U78.6102154332631 V24.0166143731538 G1 X101.406493263683 Y11.6125868744677 U101.406493263683 V11.6125868744677 G1 X57.365517020264 Y7.55742399224854 U57.365517020264 V7.55742399224854 G1 X49.3689168105043 Y22.2275719838839 U49.3689168105043 V22.2275719838839 G1 X25.0210598390317 Y9.22719695550413 U25.0210598390317 V9.22719695550413 G1 X10.460086722869 Y7.67669351816836 U10.460086722869 V7.67669351816836 G1 X0 U0 G0 Y0 V0NCViewer preview:
DWC Preview:
-
RE: Does RRF support 3d arcs?posted in CNC
@bot You might be interested spending 30 minutes watching this: https://youtu.be/aVwxzDHniEw . I enjoyed it a lot!
-
RE: Input Shaping Feedback: Square corners vs Radiiposted in Beta Firmware
@ccs86 I also noticed that when IS is enabled i have to almost double my PA: 0.03 to 0.05 to get the same results. Probably IS is really more effective on sharp corners, but also it introduces some variations to acceleration that alters the tuning we used to have since last 3.3 version.
-
RE: Accelerometer data interpretationposted in Using Duet Controllers
@dc42 just had 2 hours to play with a VM and managed to compile the source.
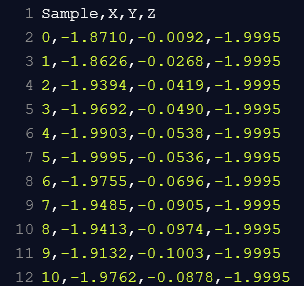
On the current source i can read correct data from X and Y axes (both together or alone) but Z axis is always reading -1.9995 as value. Also X Values is near -2 and it seems not correct to me. Shouldn't X and Y be near 0 and Z to -1 with a reading without moves?
UPDATE:
So i've looked at the changes you made in the latest version and came up with this fix:
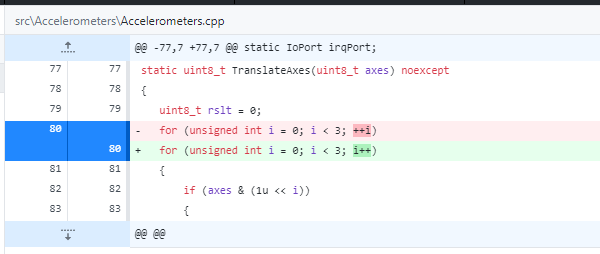
I am not a programmer, but i've tested it and it seems that it has fixed it. Can you confirm?Maybe it's only another error that fixes my particular issue
Nevermind all! I've looked more at C++ language and understood that in the for loop ++i has the same behaviour of i++ so that was not the fix. However now it seems to be working fine. I'll do more tests but it seems that there was something wrong with the accelerometers itself, returning wrong data...
-
RE: Firmware Build errors [help needed]posted in Firmware developers
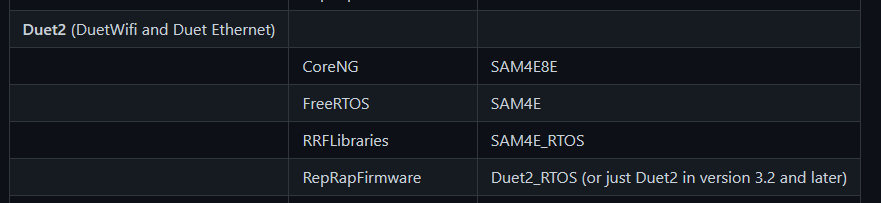
@jay_s_uk Thank you, i think the documentation need to be updated then because it says to use CoreNG.
Also CRC32APPENDER need to be copied from rrf tools folder to one of those inculded in PATH to get full compilation.
-
Firmware Build errors [help needed]posted in Firmware developers
Hi all,
i'm trying to build latest dev just to fix the problem with accelerometer axis not fetched correctly on the latest beta build.
I've created a Windows 10 clean VM and followed the instruction at https://github.com/Duet3D/RepRapFirmware/wiki/Building-RepRapFirmwareAfter importing all the projects in the workspace of eclipse, i can build all (duet2) except for RepRapFirmware.
This is my workplace:
This is the output that i get:08:44:48 **** Build of configuration Duet2 for project RepRapFirmware **** make -j4 all Building file: ../src/libcpp/eh_alloc.cpp Building file: ../src/libcpp/vterminate.cc Building file: ../src/libc/memcmp.c Building file: ../src/libc/memcpy.c Invoking: Cross G++ Compiler Invoking: Cross G++ Compiler arm-none-eabi-g++ -std=gnu++17 -D__SAM4E8E__ -DRTOS -DDUET_NG -D_XOPEN_SOURCE -I"C:\Eclipse\Firmware\RepRapFirmware\src" -I"C:\Eclipse\Firmware\RepRapFirmware\src\Hardware\SAM4E" -I"C:\Eclipse\Firmware\RepRapFirmware\src\DuetNG" -I"C:\Eclipse\Firmware\RepRapFirmware\src\Networking" -I"C:\Eclipse\Firmware\DuetWiFiSocketServer\src\include" -I"C:\Eclipse\Firmware\FreeRTOS\src\include" -I"C:\Eclipse\Firmware\FreeRTOS\src\portable\GCC\ARM_CM4F" -I"C:\Eclipse\Firmware\RRFLibraries\src" -Os -Wall -c -mcpu=cortex-m4 -mthumb -mfpu=fpv4-sp-d16 -mfloat-abi=hard -ffunction-sections -fdata-sections -fno-threadsafe-statics -fno-rtti -fexceptions -nostdlib -Wundef -Wdouble-promotion -Werror=return-type -Wsuggest-override -fsingle-precision-constant "-Wa,-ahl=vterminate.s" -fstack-usage -MMD -MP -MF"src/libcpp/vterminate.d" -MT"src/libcpp/vterminate.o" -o "src/libcpp/vterminate.o" "../src/libcpp/vterminate.cc" Invoking: Cross GCC Compiler arm-none-eabi-g++ -std=gnu++17 -D__SAM4E8E__ -DRTOS -DDUET_NG -D_XOPEN_SOURCE -I"C:\Eclipse\Firmware\RepRapFirmware\src" -I"C:\Eclipse\Firmware\RepRapFirmware\src\Hardware\SAM4E" -I"C:\Eclipse\Firmware\RepRapFirmware\src\DuetNG" -I"C:\Eclipse\Firmware\RepRapFirmware\src\Networking" -I"C:\Eclipse\Firmware\DuetWiFiSocketServer\src\include" -I"C:\Eclipse\Firmware\FreeRTOS\src\include" -I"C:\Eclipse\Firmware\FreeRTOS\src\portable\GCC\ARM_CM4F" -I"C:\Eclipse\Firmware\RRFLibraries\src" -Os -Wall -c -mcpu=cortex-m4 -mthumb -mfpu=fpv4-sp-d16 -mfloat-abi=hard -ffunction-sections -fdata-sections -fno-threadsafe-statics -fno-rtti -fexceptions -nostdlib -Wundef -Wdouble-promotion -Werror=return-type -Wsuggest-override -fsingle-precision-constant "-Wa,-ahl=eh_alloc.s" -fstack-usage -MMD -MP -MF"src/libcpp/eh_alloc.d" -MT"src/libcpp/eh_alloc.o" -o "src/libcpp/eh_alloc.o" "../src/libcpp/eh_alloc.cpp" arm-none-eabi-gcc -std=gnu99 -D__SAM4E8E__ -DRTOS -DDUET_NG -Dnoexcept= -Os -Wall -c -mcpu=cortex-m4 -mthumb -mfpu=fpv4-sp-d16 -mfloat-abi=hard -ffunction-sections -fdata-sections -nostdlib -Wundef -Wdouble-promotion -Werror=return-type -Werror=implicit -fsingle-precision-constant "-Wa,-ahl=memcmp.s" -MMD -MP -MF"src/libc/memcmp.d" -MT"src/libc/memcmp.o" -o "src/libc/memcmp.o" "../src/libc/memcmp.c" Invoking: Cross GCC Compiler arm-none-eabi-gcc -std=gnu99 -D__SAM4E8E__ -DRTOS -DDUET_NG -Dnoexcept= -Os -Wall -c -mcpu=cortex-m4 -mthumb -mfpu=fpv4-sp-d16 -mfloat-abi=hard -ffunction-sections -fdata-sections -nostdlib -Wundef -Wdouble-promotion -Werror=return-type -Werror=implicit -fsingle-precision-constant "-Wa,-ahl=memcpy.s" -MMD -MP -MF"src/libc/memcpy.d" -MT"src/libc/memcpy.o" -o "src/libc/memcpy.o" "../src/libc/memcpy.c" Finished building: ../src/libcpp/vterminate.cc Finished building: ../src/libc/memcmp.c Finished building: ../src/libc/memcpy.c Building file: ../src/libc/memmove.c Building file: ../src/libc/memset.c Invoking: Cross GCC Compiler Invoking: Cross GCC Compiler Building file: ../src/libc/nano-mallocr.c Finished building: ../src/libcpp/eh_alloc.cpp arm-none-eabi-gcc -std=gnu99 -D__SAM4E8E__ -DRTOS -DDUET_NG -Dnoexcept= -Os -Wall -c -mcpu=cortex-m4 -mthumb -mfpu=fpv4-sp-d16 -mfloat-abi=hard -ffunction-sections -fdata-sections -nostdlib -Wundef -Wdouble-promotion -Werror=return-type -Werror=implicit -fsingle-precision-constant "-Wa,-ahl=memmove.s" -MMD -MP -MF"src/libc/memmove.d" -MT"src/libc/memmove.o" -o "src/libc/memmove.o" "../src/libc/memmove.c" arm-none-eabi-gcc -std=gnu99 -D__SAM4E8E__ -DRTOS -DDUET_NG -Dnoexcept= -Os -Wall -c -mcpu=cortex-m4 -mthumb -mfpu=fpv4-sp-d16 -mfloat-abi=hard -ffunction-sections -fdata-sections -nostdlib -Wundef -Wdouble-promotion -Werror=return-type -Werror=implicit -fsingle-precision-constant "-Wa,-ahl=memset.s" -MMD -MP -MF"src/libc/memset.d" -MT"src/libc/memset.o" -o "src/libc/memset.o" "../src/libc/memset.c" Invoking: Cross GCC Compiler arm-none-eabi-gcc -std=gnu99 -D__SAM4E8E__ -DRTOS -DDUET_NG -Dnoexcept= -Os -Wall -c -mcpu=cortex-m4 -mthumb -mfpu=fpv4-sp-d16 -mfloat-abi=hard -ffunction-sections -fdata-sections -nostdlib -Wundef -Wdouble-promotion -Werror=return-type -Werror=implicit -fsingle-precision-constant "-Wa,-ahl=nano-mallocr.s" -MMD -MP -MF"src/libc/nano-mallocr.d" -MT"src/libc/nano-mallocr.o" -o "src/libc/nano-mallocr.o" "../src/libc/nano-mallocr.c" Building file: ../src/libc/strptime.cpp Invoking: Cross G++ Compiler arm-none-eabi-g++ -std=gnu++17 -D__SAM4E8E__ -DRTOS -DDUET_NG -D_XOPEN_SOURCE -I"C:\Eclipse\Firmware\RepRapFirmware\src" -I"C:\Eclipse\Firmware\RepRapFirmware\src\Hardware\SAM4E" -I"C:\Eclipse\Firmware\RepRapFirmware\src\DuetNG" -I"C:\Eclipse\Firmware\RepRapFirmware\src\Networking" -I"C:\Eclipse\Firmware\DuetWiFiSocketServer\src\include" -I"C:\Eclipse\Firmware\FreeRTOS\src\include" -I"C:\Eclipse\Firmware\FreeRTOS\src\portable\GCC\ARM_CM4F" -I"C:\Eclipse\Firmware\RRFLibraries\src" -Os -Wall -c -mcpu=cortex-m4 -mthumb -mfpu=fpv4-sp-d16 -mfloat-abi=hard -ffunction-sections -fdata-sections -fno-threadsafe-statics -fno-rtti -fexceptions -nostdlib -Wundef -Wdouble-promotion -Werror=return-type -Wsuggest-override -fsingle-precision-constant "-Wa,-ahl=strptime.s" -fstack-usage -MMD -MP -MF"src/libc/strptime.d" -MT"src/libc/strptime.o" -o "src/libc/strptime.o" "../src/libc/strptime.cpp" Finished building: ../src/libc/memmove.c Finished building: ../src/libc/memset.c Building file: ../src/bossa/Applet.cpp Building file: ../src/bossa/BossaFlash.cpp Invoking: Cross G++ Compiler arm-none-eabi-g++ -std=gnu++17 -D__SAM4E8E__ -DRTOS -DDUET_NG -D_XOPEN_SOURCE -I"C:\Eclipse\Firmware\RepRapFirmware\src" -I"C:\Eclipse\Firmware\RepRapFirmware\src\Hardware\SAM4E" -I"C:\Eclipse\Firmware\RepRapFirmware\src\DuetNG" -I"C:\Eclipse\Firmware\RepRapFirmware\src\Networking" -I"C:\Eclipse\Firmware\DuetWiFiSocketServer\src\include" -I"C:\Eclipse\Firmware\FreeRTOS\src\include" -I"C:\Eclipse\Firmware\FreeRTOS\src\portable\GCC\ARM_CM4F" -I"C:\Eclipse\Firmware\RRFLibraries\src" -Os -Wall -c -mcpu=cortex-m4 -mthumb -mfpu=fpv4-sp-d16 -mfloat-abi=hard -ffunction-sections -fdata-sections -fno-threadsafe-statics -fno-rtti -fexceptions -nostdlib -Wundef -Wdouble-promotion -Werror=return-type -Wsuggest-override -fsingle-precision-constant "-Wa,-ahl=Applet.s" -fstack-usage -MMD -MP -MF"src/bossa/Applet.d" -MT"src/bossa/Applet.o" -o "src/bossa/Applet.o" "../src/bossa/Applet.cpp" Invoking: Cross G++ Compiler arm-none-eabi-g++ -std=gnu++17 -D__SAM4E8E__ -DRTOS -DDUET_NG -D_XOPEN_SOURCE -I"C:\Eclipse\Firmware\RepRapFirmware\src" -I"C:\Eclipse\Firmware\RepRapFirmware\src\Hardware\SAM4E" -I"C:\Eclipse\Firmware\RepRapFirmware\src\DuetNG" -I"C:\Eclipse\Firmware\RepRapFirmware\src\Networking" -I"C:\Eclipse\Firmware\DuetWiFiSocketServer\src\include" -I"C:\Eclipse\Firmware\FreeRTOS\src\include" -I"C:\Eclipse\Firmware\FreeRTOS\src\portable\GCC\ARM_CM4F" -I"C:\Eclipse\Firmware\RRFLibraries\src" -Os -Wall -c -mcpu=cortex-m4 -mthumb -mfpu=fpv4-sp-d16 -mfloat-abi=hard -ffunction-sections -fdata-sections -fno-threadsafe-statics -fno-rtti -fexceptions -nostdlib -Wundef -Wdouble-promotion -Werror=return-type -Wsuggest-override -fsingle-precision-constant "-Wa,-ahl=BossaFlash.s" -fstack-usage -MMD -MP -MF"src/bossa/BossaFlash.d" -MT"src/bossa/BossaFlash.o" -o "src/bossa/BossaFlash.o" "../src/bossa/BossaFlash.cpp" Finished building: ../src/libc/nano-mallocr.c Building file: ../src/bossa/Device.cpp Invoking: Cross G++ Compiler Finished building: ../src/libc/strptime.cpp arm-none-eabi-g++ -std=gnu++17 -D__SAM4E8E__ -DRTOS -DDUET_NG -D_XOPEN_SOURCE -I"C:\Eclipse\Firmware\RepRapFirmware\src" -I"C:\Eclipse\Firmware\RepRapFirmware\src\Hardware\SAM4E" -I"C:\Eclipse\Firmware\RepRapFirmware\src\DuetNG" -I"C:\Eclipse\Firmware\RepRapFirmware\src\Networking" -I"C:\Eclipse\Firmware\DuetWiFiSocketServer\src\include" -I"C:\Eclipse\Firmware\FreeRTOS\src\include" -I"C:\Eclipse\Firmware\FreeRTOS\src\portable\GCC\ARM_CM4F" -I"C:\Eclipse\Firmware\RRFLibraries\src" -Os -Wall -c -mcpu=cortex-m4 -mthumb -mfpu=fpv4-sp-d16 -mfloat-abi=hard -ffunction-sections -fdata-sections -fno-threadsafe-statics -fno-rtti -fexceptions -nostdlib -Wundef -Wdouble-promotion -Werror=return-type -Wsuggest-override -fsingle-precision-constant "-Wa,-ahl=Device.s" -fstack-usage -MMD -MP -MF"src/bossa/Device.d" -MT"src/bossa/Device.o" -o "src/bossa/Device.o" "../src/bossa/Device.cpp" In file included from C:\Eclipse\Firmware\RepRapFirmware\src/GCodes/GCodeException.h:11, from ../src/bossa/Samba.h:37, from ../src/bossa/Applet.h:34, from ../src/bossa/Applet.cpp:29: C:\Eclipse\Firmware\RepRapFirmware\src/RepRapFirmware.h:49:10: fatal error: Core.h: No such file or directory 49 | #include <Core.h> | ^~~~~~~~ compilation terminated. src/bossa/subdir.mk:42: recipe for target 'src/bossa/Applet.o' failed make: *** [src/bossa/Applet.o] Error 1 Building file: ../src/bossa/EefcFlash.cpp make: *** Waiting for unfinished jobs.... Invoking: Cross G++ Compiler arm-none-eabi-g++ -std=gnu++17 -D__SAM4E8E__ -DRTOS -DDUET_NG -D_XOPEN_SOURCE -I"C:\Eclipse\Firmware\RepRapFirmware\src" -I"C:\Eclipse\Firmware\RepRapFirmware\src\Hardware\SAM4E" -I"C:\Eclipse\Firmware\RepRapFirmware\src\DuetNG" -I"C:\Eclipse\Firmware\RepRapFirmware\src\Networking" -I"C:\Eclipse\Firmware\DuetWiFiSocketServer\src\include" -I"C:\Eclipse\Firmware\FreeRTOS\src\include" -I"C:\Eclipse\Firmware\FreeRTOS\src\portable\GCC\ARM_CM4F" -I"C:\Eclipse\Firmware\RRFLibraries\src" -Os -Wall -c -mcpu=cortex-m4 -mthumb -mfpu=fpv4-sp-d16 -mfloat-abi=hard -ffunction-sections -fdata-sections -fno-threadsafe-statics -fno-rtti -fexceptions -nostdlib -Wundef -Wdouble-promotion -Werror=return-type -Wsuggest-override -fsingle-precision-constant "-Wa,-ahl=EefcFlash.s" -fstack-usage -MMD -MP -MF"src/bossa/EefcFlash.d" -MT"src/bossa/EefcFlash.o" -o "src/bossa/EefcFlash.o" "../src/bossa/EefcFlash.cpp" In file included from C:\Eclipse\Firmware\RepRapFirmware\src/GCodes/GCodeException.h:11, from ../src/bossa/Samba.h:37, from ../src/bossa/BossaFlash.h:35, from ../src/bossa/BossaFlash.cpp:29: C:\Eclipse\Firmware\RepRapFirmware\src/RepRapFirmware.h:49:10: fatal error: Core.h: No such file or directory 49 | #include <Core.h> | ^~~~~~~~ compilation terminated. src/bossa/subdir.mk:42: recipe for target 'src/bossa/BossaFlash.o' failed make: *** [src/bossa/BossaFlash.o] Error 1 In file included from C:\Eclipse\Firmware\RepRapFirmware\src/GCodes/GCodeException.h:11, from ../src/bossa/Samba.h:37, from ../src/bossa/Device.h:32, from ../src/bossa/Device.cpp:29: C:\Eclipse\Firmware\RepRapFirmware\src/RepRapFirmware.h:49:10: fatal error: Core.h: No such file or directory 49 | #include <Core.h> | ^~~~~~~~ compilation terminated. src/bossa/subdir.mk:42: recipe for target 'src/bossa/Device.o' failed make: *** [src/bossa/Device.o] Error 1 In file included from C:\Eclipse\Firmware\RepRapFirmware\src/GCodes/GCodeException.h:11, from ../src/bossa/Samba.h:37, from ../src/bossa/BossaFlash.h:35, from ../src/bossa/EefcFlash.h:34, from ../src/bossa/EefcFlash.cpp:29: C:\Eclipse\Firmware\RepRapFirmware\src/RepRapFirmware.h:49:10: fatal error: Core.h: No such file or directory 49 | #include <Core.h> | ^~~~~~~~ compilation terminated. src/bossa/subdir.mk:42: recipe for target 'src/bossa/EefcFlash.o' failed make: *** [src/bossa/EefcFlash.o] Error 1 08:44:50 Build Failed. 13 errors, 0 warnings. (took 2s.185ms)I see a lot of references to Core.h not found. Anyone that can help me solve this?
Thanks! -
RE: Is there a script run for "Tool 0" ?posted in Duet Web Control
@jens55 it sets tool 0 as the active tool. If you have only one, you can add "T0"at the end of config.g to enable it automatically at startup.
-
RE: Unofficial 3.4 Maestro Beta: Extruder Drive Issueposted in Beta Firmware
@ccs86 I think i hit the same bug but on a duet2 wifi running the latest beta. It seems that high pitch is starting when printing lines considered "bridges" from prusa slicer at the first layer that was at 0.13mm (variable layer height print). Also i notices some more clicking on other test print i was doing as per previous beta build. I get nothing when issue M122 on that firmware.
Video of the issue (starts at around 0:50):
Youtube link
Gcode:
Spool.gConfig.g:
; Configuration file for Duet WiFi (firmware version 3) ; executed by the firmware on start-up ; ; generated by RepRapFirmware Configuration Tool v3.1.9 on Sat Nov 28 2020 11:28:36 GMT+0100 (Ora standard dell’Europa centrale) ; General preferences G21 G90 ; send absolute coordinates... M83 ; ...but relative extruder moves M550 P"Voron 2.4" ; set printer name M669 K1 ; select CoreXY mode ; Network M552 S1 ; enable network M586 P0 S1 ; enable HTTP M586 P1 S0 ; disable FTP M586 P2 S0 ; disable Telnet ; PanelDue M575 P1 S1 B57600 ; --- drive map --- ; _______ ; | 6 | 7 | ; | ----- | ; | 5 | 8 | ; ------- ; front ; Drives M569 P0 S1 ; A M569 P1 S1 ; B M569 P3 S1 ; Extruder M569 P5 S1 ; Z1 M569 P6 S0 ; Z2 M569 P7 S1 ; Z3 M569 P8 S0 ; Z4 M584 X0 Y1 Z5:6:7:8 E3 ; set drive mapping M350 X16 Y16 Z16 E16 I1 ; configure microstepping with interpolation M92 X80.00 Y80.00 Z400.00 E419.50 ; set steps per mm M906 X800 Y800 Z1000 E800 I75 ; set motor currents (mA) and motor idle factor in per cent M84 S30 ; Set idle timeout ;M566 X1500 Y1500 Z60 E16000 ; Set maximum instantaneous speed changes (mm/min) ;M203 X18000 Y18000 Z3000 E20000 ; Set maximum speeds (mm/min) ;M201 X3000 Y3000 Z250 E4000 ; Set maximum accelerations (mm/s^2) M566 X600 Y600 Z600 E8000 ; Set maximum instantaneous speed changes (mm/min) M203 X18000 Y18000 Z6000 E15000 ; Set maximum speeds (mm/min) M201 X20000 Y20000 Z1500 E1800 ; Set maximum accelerations (mm/s^2) M204 P1500 T2000 ; Set printing acceleration and travel accelerations ; Axis Limits M208 X3:350 ; set axis minima/maxima M208 Y0:350 M208 Z0:330 ; Endstops M574 X2 S1 P"xstop" ; configure active-high endstop for high end on X via pin xstop M574 Y2 S1 P"ystop" ; configure active-high endstop for high end on Y via pin ystop M574 Z1 S1 P"zstop" ; configure active-high endstop for low end on Z via pin zstop ; Z-Probe ;M558 P5 C"^zprobe.in" H5 F120 T6000 ; set Z probe type to switch and the dive height + speeds ;G31 P500 X0 Y25 Z2.5 ; set Z probe trigger value, offset and trigger height ; Heaters M308 S0 P"bedtemp" Y"thermistor" A"Piatto" T100000 B4138 ; configure sensor 0 as thermistor on pin bedtemp M950 H0 C"bedheat" T0 ; create bed heater output on bedheat and map it to sensor 0 M307 H0 R0.703 C465.2 D4.17 S0.65 V23.9 B0 ;PWM max @65% ;M307 H0 R0.636 C552.9 D5.58 S1.00 V23.9 B0 PWM max @ 100% M140 H0 ; map heated bed to heater 0 M143 H0 S120 ; set temperature limit for heater 0 to 120C M308 S1 P"spi.cs1" Y"rtd-max31865" R430 ;PT100 ;M308 S1 P"e0temp" Y"thermistor" A"Estrusore" T100000 B4725 C7.06e-8 ;B4138 originale E3D ;M308 S1 P"e0temp" Y"thermistor" A"Estrusore" T100000 B3950 ;NTC CINESE M950 H1 C"e0heat" T1 ; create nozzle heater output on e0heat and map it to sensor 1 M307 H1 B0 ; disable bang-bang mode for heater and set PWM limit M143 H1 S280 ; set temperature limit for heater 1 to 280C ; Fans M950 F0 C"fan1" Q500 ; create fan 1 on pin fan1 and set its frequency M106 P0 S0 H-1 C"Layer" ; set fan 1 value. Thermostatic control is turned on M950 F1 C"fan0" Q32000 ; create fan 0 on pin fan0 and set its frequency M106 P1 S255 H1 T45 C"Hotend" ; set fan 0 value. Thermostatic control is turned off M950 F2 C"fan2" Q100 ; create fan 0 on pin fan0 and set its frequency M106 P2 S0 H0 T50 C"Elettronica" ; set fan 0 value. Thermostatic control is turned off M950 F3 C"e1heat" ; create fan 0 on pin fan0 and set its frequency M106 P3 S0 H-1 C"Luci" B0 L0 ; set fan 0 value. Thermostatic control is turned off M950 F4 C"duex.fan3" Q32000 ; create fan 1 on pin fan1 and set its frequency M106 P4 S0 H-1 C"LayerBIG" ; set fan 1 value. Thermostatic control is turned on ; Tools M563 P0 D0 H1 F0 ; define tool 0 G10 P0 X0 Y0 Z0 ; set tool 0 axis offsets G10 P0 R0 S0 ; set initial tool 0 active and standby temperatures to 0C ; NPN Z-Probe M400 M558 P8 C"zprobe.in" F1200 H5 A5 S0.01 B0 R0.2 T25000 G31 T8 P500 X0 Y25 Z0.665 ; inductive probe offset, not critical, only used for coarse homing ; Z tower positions M671 X-65:-65:365:365 Y-20:380:380:-20 S20 ; Define Z belts locations (Front_Left, Back_Left, Back_Right, Front_Right) M557 X10:340 Y0:300 P10 ;Taper height M376 H10 ; Miscellaneous M501 ; load saved parameters from non-volatile memory M911 S10 R11 P"M913 X0 Y0 G91 M83 G1 Z3 E-5 F1000" ; set voltage thresholds and actions to run on power loss ;Accelerometer M955 P0 C"spi.cs5+spi.cs6" I50 ; Input Shaping M593 P"zvdd" F58.4 ;M593 F50 ;Firmware retraction M207 S1.5 F3600 Z0.2 ;Full Lights on at startup M106 P3 S1.0 T0filament.g:
;M592 D0 A0.001692599 B-0.000105515 M572 D0 S0.045 -
RE: Question about first test with Pressure Advanceposted in Tuning and tweaking
@fcwilt here's something to read to understand how to proceed with the test and determine the correct PA value based on it.
-
RE: Question about first test with Pressure Advanceposted in Tuning and tweaking
@fcwilt i would try using the marlin K-factor Calibration Pattern. Need only some find/replace on the generated gcode because it uses the marlin language.
-
RE: Accelerometer data interpretationposted in Using Duet Controllers
@dc42 thank you David. Any chance to get a compiled binaries for Duet2wifi to test it out? Still have to test input shaping because i was not sure if the data was reliable... i saw resonance on Z axis for example while testing X or Y axis.
-
RE: Accelerometer data interpretationposted in Using Duet Controllers
@dc42 csv is displayed correctly as csv contains 0 for each row in Y axis.
-
RE: Accelerometer data interpretationposted in Using Duet Controllers
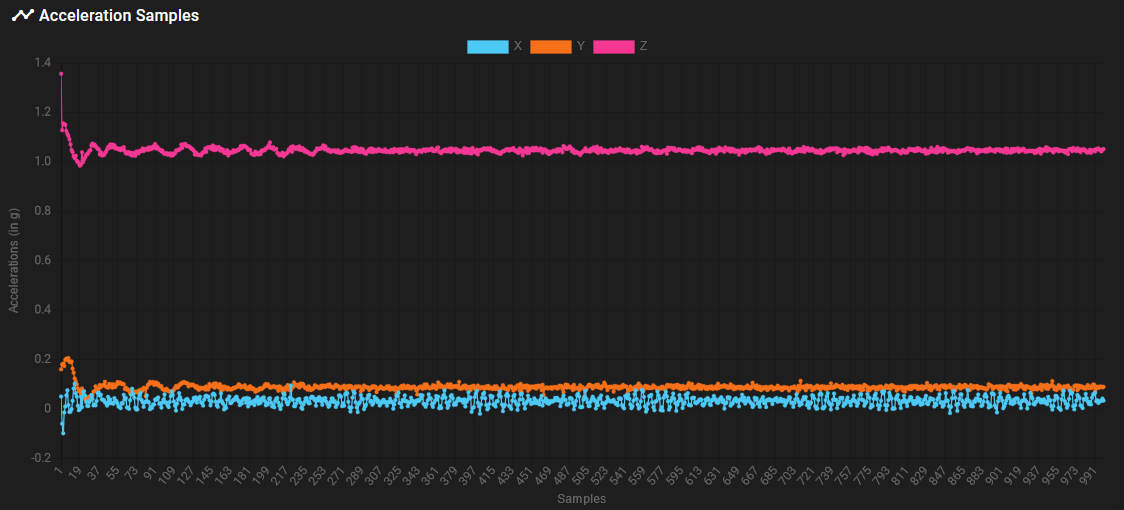
@dc42 Sorry for the delay. I figured out that despite the chip is marked differently than the image on the datasheet, the axed are oriented in the same way. To test it i did statical reading while holding the accelerometers in different position and checking if the expected axes reported nearly 1g.
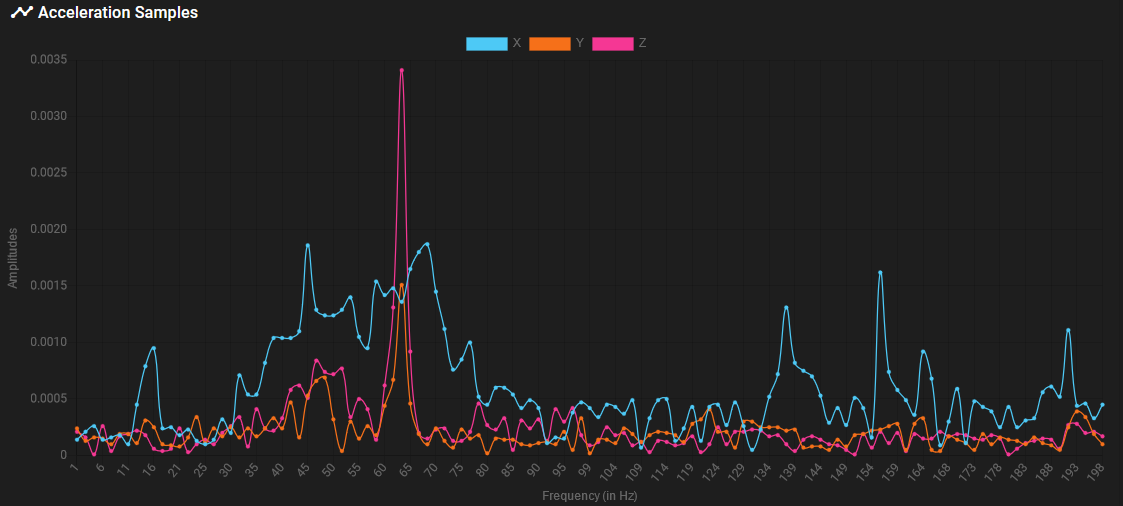
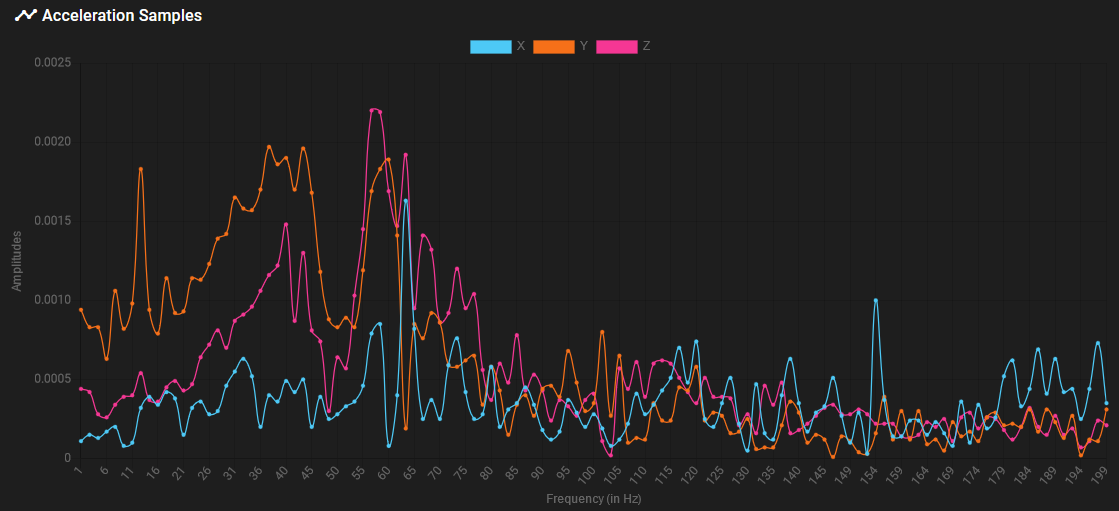
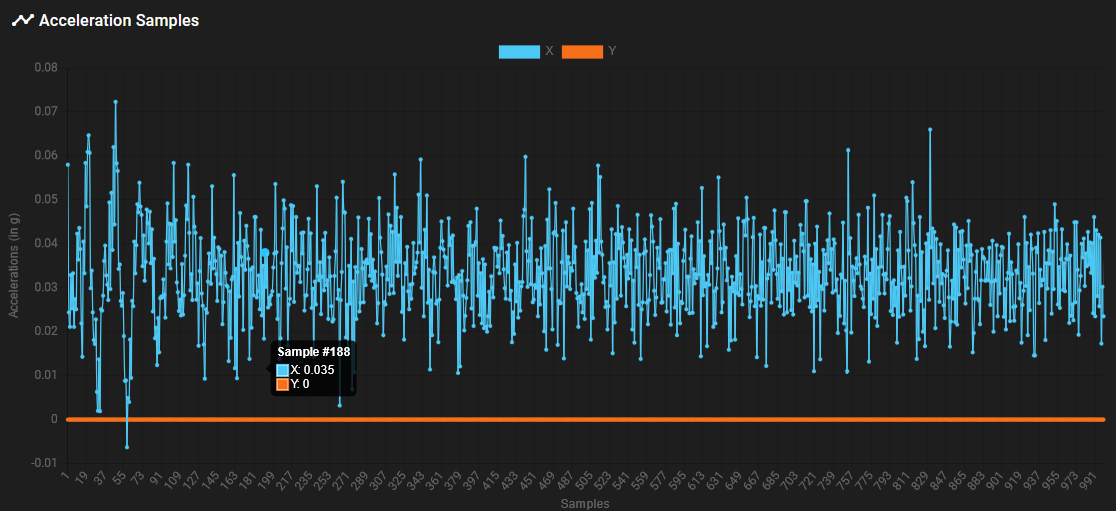
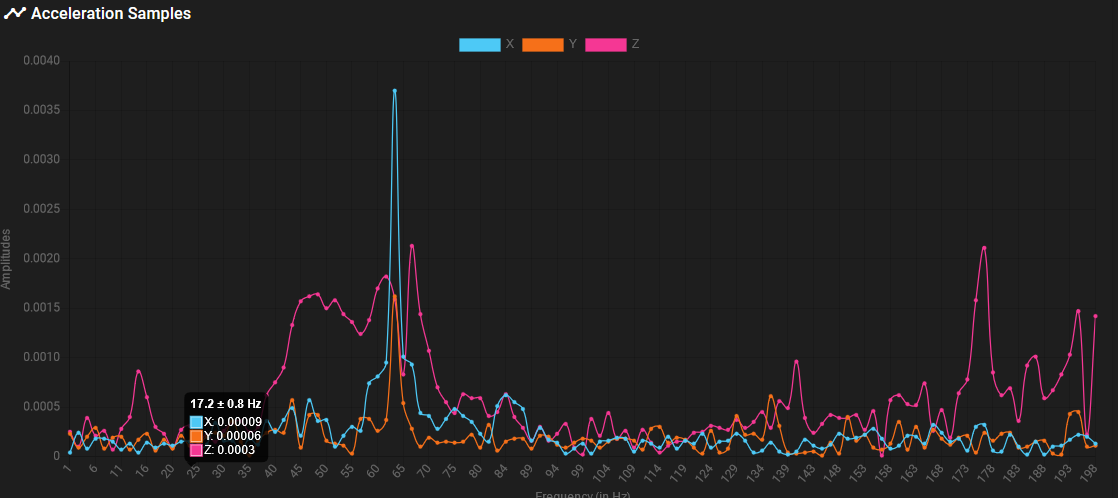
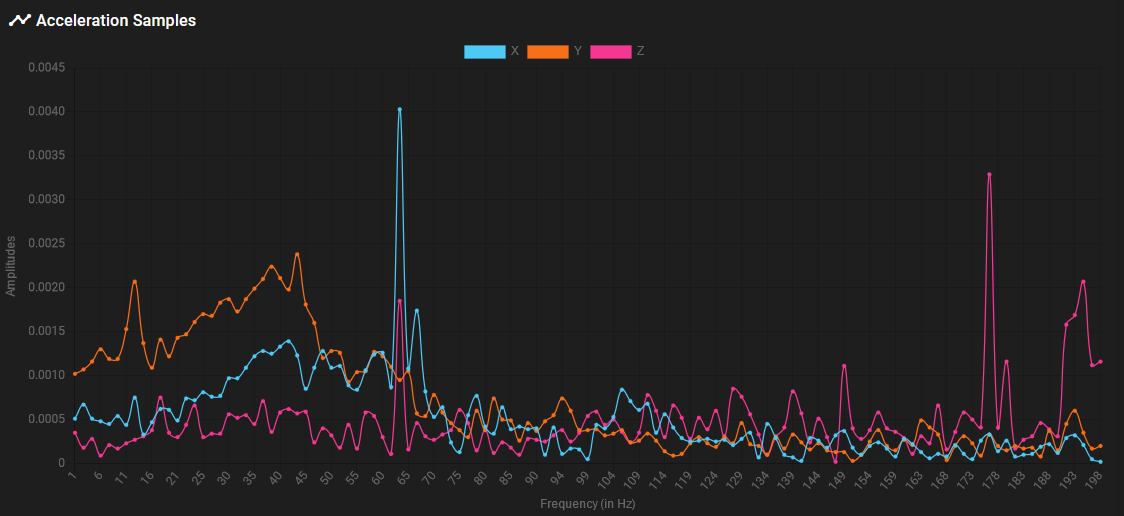
Now that i have figured that out, here's the results of the previous macros before and after FFT:
X AXIS:
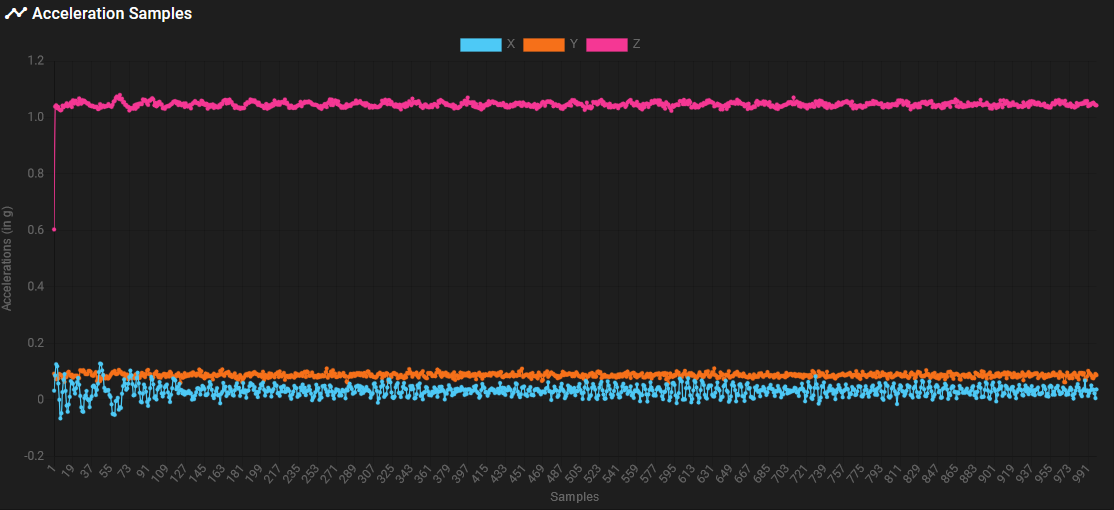
Y AXIS:
Edit:
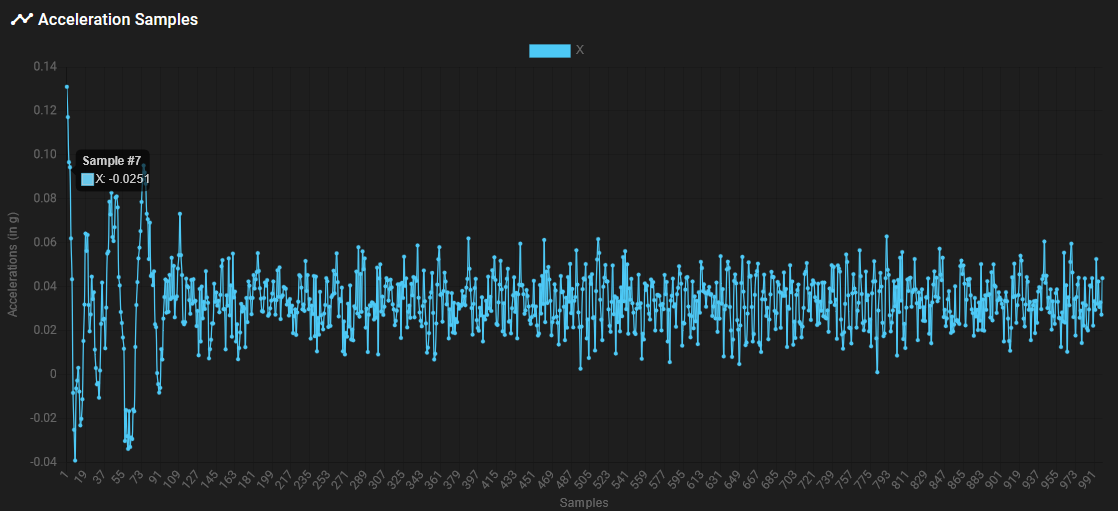
There's seems to be something wrong when selecting axes to be acquired with M956.
If i don't specify axes, i get all the readings (but i don't know if they are in the correct order).
If i specify X then i get readings
I i specify Y i get all 0 values
I i specify XY i get same values for X as only X and all 0 values for Y
I i specify XYZ i get same results as nothing specified.Here's some graph:
ONLY X
ONLY Y
X AND Y
Code (changed axes just after M956)
M593 P"none" G1 Y-50 G4 S2 G4 P10 G1 Y100 F20000 M400 M956 X P0 S1000 A0 F"test.csv" -
RE: Accelerometer data interpretationposted in Using Duet Controllers
@dc42 so turned out that i was using wrong orientation. Here are the new graphs with the wait for end of move:
Edit: more problems for me to solve... This is the datasheet of the LIS3DSH
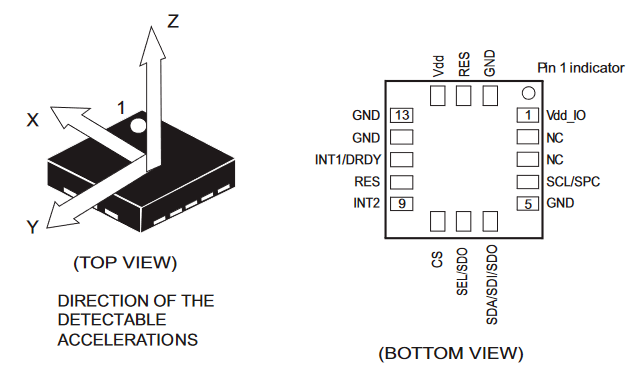
and this is what i got:
So definetly something is wrong.
-
RE: Accelerometer data interpretationposted in Using Duet Controllers
@engikeneer accelerometer is mounted in a sturdy way, also i should have no backlash. I don't know if this type of results is common because accelerometer support is new in duet and all other example i see are from the klipper algorithm that uses a different technique to obtain the data from what i saw.
thank you @dc42 :
My fault, i didn't probably revert the orientation...i'll check it!