Hello All,
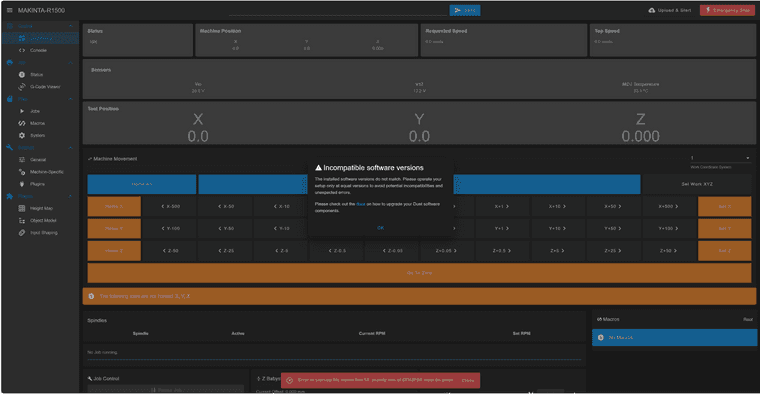
I just upgraded my firmware to 3.5.0Cr2, I'm getting an error at the startup for my 1HCL Driver board running with a closed-loop system
with no movement at all. Error in macro line 29 while starting up: No encoder specified for closed-loop drive mode
M122
m122
=== Diagnostics ===
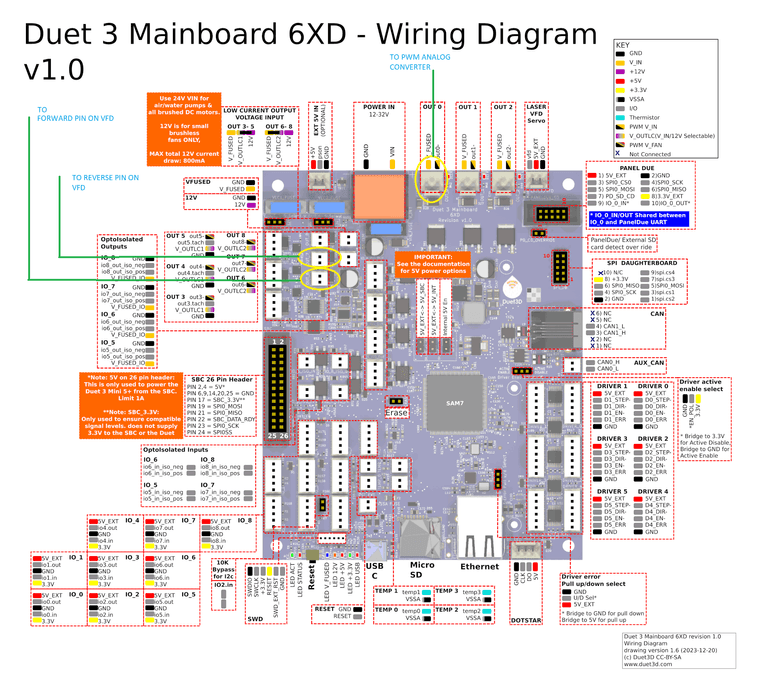
RepRapFirmware for Duet 3 MB6XD version 3.5.0-rc.2 (2023-12-14 10:33:00) running on Duet 3 MB6XD v1.0 (standalone mode)
Board ID: 08DLM-956DA-M2NS4-6JKD6-3S86T-1B32S
Used output buffers: 3 of 40 (19 max)
Error in macro line 29 while starting up: No encoder specified for closed loop drive mode
=== RTOS ===
Static ram: 153284
Dynamic ram: 117380 of which 0 recycled
Never used RAM 72472, free system stack 204 words
Tasks: NETWORK(1,ready,34.2%,182) ETHERNET(5,nWait,0.1%,321) HEAT(3,nWait,0.0%,369) Move(4,nWait,0.0%,340) CanReceiv(6,nWait,0.0%,797) CanSender(5,nWait,0.0%,334) CanClock(7,delaying,0.0%,343) MAIN(1,running,65.6%,128) IDLE(0,ready,0.1%,30), total 100.0%
Owned mutexes:
=== Platform ===
Last reset 00:03:50 ago, cause: software
Last software reset at 2023-12-23 03:10, reason: User, Gcodes spinning, available RAM 75408, slot 0
Software reset code 0x0003 HFSR 0x00000000 CFSR 0x00000000 ICSR 0x00400000 BFAR 0x00000000 SP 0x00000000 Task MAIN Freestk 0 n/a
Error status: 0x00
Aux0 errors 0,0,0
MCU temperature: min 34.5, current 34.8, max 35.0
Supply voltage: min 24.9, current 24.9, max 24.9, under voltage events: 0, over voltage events: 0, power good: yes
12V rail voltage: min 12.0, current 12.1, max 12.2, under voltage events: 0
Heap OK, handles allocated/used 99/2, heap memory allocated/used/recyclable 2048/60/0, gc cycles 0
Events: 0 queued, 0 completed
Driver 0: ok
Driver 1: ok
Driver 2: ok
Driver 3: ok
Driver 4: ok
Driver 5: ok
Date/time: 2023-12-23 03:14:19
Slowest loop: 11.57ms; fastest: 0.07ms
=== Storage ===
Free file entries: 20
SD card 0 detected, interface speed: 25.0MBytes/sec
SD card longest read time 3.7ms, write time 0.0ms, max retries 0
=== Move ===
DMs created 125, segments created 0, maxWait 0ms, bed compensation in use: none, height map offset 0.000, max steps late 0, ebfmin 0.00, ebfmax 0.00
no step interrupt scheduled
Moves shaped first try 0, on retry 0, too short 0, wrong shape 0, maybepossible 0
=== DDARing 0 ===
Scheduled moves 0, completed 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1
=== DDARing 1 ===
Scheduled moves 0, completed 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1
=== Heat ===
Bed heaters 0 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1, chamber heaters -1 -1 -1 -1, ordering errs 0
=== GCodes ===
Movement locks held by null, null
HTTP is idle in state(s) 0
Telnet is idle in state(s) 0
File is idle in state(s) 0
USB is idle in state(s) 0
Aux is idle in state(s) 0
Trigger is idle in state(s) 0
Queue is idle in state(s) 0
LCD is idle in state(s) 0
SBC is idle in state(s) 0
Daemon is idle in state(s) 0
Aux2 is idle in state(s) 0
Autopause is idle in state(s) 0
File2 is idle in state(s) 0
Queue2 is idle in state(s) 0
Q0 segments left 0, axes/extruders owned 0x0000000
Code queue 0 is empty
Q1 segments left 0, axes/extruders owned 0x0000000
Code queue 1 is empty
=== CAN ===
Messages queued 1185, received 1873, lost 0, errs 949, boc 0
Longest wait 1ms for reply type 6018, peak Tx sync delay 1218, free buffers 50 (min 49), ts 1152/1150/0
Tx timeouts 0,0,1,0,0,0 last cancelled message type 30 dest 127
=== Network ===
Slowest loop: 5.65ms; fastest: 0.03ms
Responder states: MQTT(0) HTTP(0) HTTP(0) HTTP(0) HTTP(0) HTTP(0) HTTP(0) FTP(0) Telnet(0) Telnet(0)
HTTP sessions: 1 of 8
= Ethernet =
Interface state: active
Error counts: 0 0 0 1 0 0
Socket states: 5 2 2 2 2 0 0 0
=== Multicast handler ===
Responder is inactive, messages received 0, responses 0
M122 B50
m122 B50
Diagnostics for board 50:
Duet EXP1HCL rev 1.0a or earlier firmware version 3.5.0-rc.2 (2023-12-14 08:55:39)
Bootloader ID: SAME5x bootloader version 2.4 (2021-12-10)
All averaging filters OK
Never used RAM 75936, free system stack 198 words
Tasks: Move(3,nWait,0.0%,182) CLSend(3,nWait,0.0%,150) HEAT(2,nWait,0.0%,120) CanAsync(5,nWait,0.0%,67) CanRecv(3,nWait,0.0%,80) CanClock(5,nWait,0.0%,70) TMC(2,nWait,19.8%,359) MAIN(1,running,77.7%,413) IDLE(0,ready,0.4%,30) AIN(2,nWait,2.1%,265), total 100.0%
Last reset 00:05:04 ago, cause: software
Last software reset data not available
Driver 0: pos 0, 80.0 steps/mm, standstill, SG min n/a, mspos 8, reads 56517, writes 32 timeouts 0, steps req 0 done 0
Moves scheduled 0, completed 0, in progress 0, hiccups 0, segs 0, step errors 0, maxLate 0 maxPrep 0, maxOverdue 0, maxInc 0, mcErrs 0, gcmErrs 0, ebfmin 0.00 max 0.00
Peak sync jitter -7/5, peak Rx sync delay 185, resyncs 0/0, next timer interrupt due in 9 ticks, enabled, next step interrupt due in 4066589403 ticks, disabled
VIN voltage: min 48.5, current 48.6, max 48.6
V12 voltage: min 12.1, current 12.1, max 12.2
MCU temperature: min 26.3C, current 26.3C, max 26.6C
Last sensors broadcast 0x00000000 found 0 135 ticks ago, 0 ordering errs, loop time 0
CAN messages queued 2480, send timeouts 0, received 1557, lost 0, errs 0, boc 0, free buffers 38, min 38, error reg 0
dup 0, oos 0/0/0/0, bm 0, wbm 0, rxMotionDelay 0
Closed loop driver 0 mode: open loop, pre-error threshold: 2.00, error threshold: 4.00, encoder type none
Accelerometer: none
I2C bus errors 12, naks 0, contentions 0, other errors 0
M98 P"config.g"
12/23/2023, 3:20:40 AM Error: No encoder specified for closed loop drive mode
Error: Encoder counts/rev must be at least two times steps/rev
Warning: Sensor number 1 has not been defined
12/23/2023, 3:20:39 AM M98 P"config.g"
HTTP is enabled on port 80
Config.g
; Configuration file for RepRapFirmware on Duet 3 Main Board 6XD
; executed by the firmware on start-up
;
; generated by RepRapFirmware Configuration Tool v3.5.0-rc.2 on Fri Dec 22 2023 21:48:41 GMT-0600 (Central Standard Time)
; General
M550 P"Duet 3-CNC" ; set hostname
; Accessories
M575 P1 S0 B57600 ; configure PanelDue support
; Network
M552 P0.0.0.0 S1 ; configure Ethernet adapter
M586 P0 S1 ; configure HTTP
; Wait a moment for the CAN expansion boards to become available
G4 S2
; Motor Idle Current Reduction
M906 I30 ; set motor current idle factor
M84 S30 ; set motor current idle timeout
; External Drivers
M569 P0.1 S1 R0 T5:5:10:0 ; driver 0.1 goes forwards and requires an active-low enable signal (Y axis)
M569 P0.2 S1 R0 T5:5:10:0 ; driver 0.2 goes forwards and requires an active-low enable signal (Z axis)
M569 P0.3 S1 R0 T5:5:10:0 ; driver 0.3 goes forwards and requires an active-low enable signal (Y axis)
; Smart Drivers
M569 P50.0 S1 D4; driver 50.0 goes forwards (X axis)
; Closed-Loop Drivers
M569.1 P50.0 T2 C5 I0 D0 ; driver 50.0 has a quadrature encoder with 5 CPS
; Axes
M584 X50.0 Y0.1:0.3 Z0.2 ; set axis mapping
M350 X16 Y16 Z16 I0 ; configure microstepping without interpolation
M906 X3000 ; set axis driver currents
M92 X80 Y80 Z400 ; configure steps per mm
M208 X0:2000 Y0:200 Z0:200 ; set minimum and maximum axis limits
M566 X900 Y900 Z12 ; set maximum instantaneous speed changes (mm/min)
M203 X20000 Y6000 Z180 ; set maximum speeds (mm/min)
M201 X500 Y500 Z20 ; set accelerations (mm/s^2)
; Kinematics
M669 K0 ; configure Cartesian kinematics
; Endstops
M574 X1 P"!50.io0.in" S1 ; configure X axis endstop
M574 Y1 P"io1.in+io2.in" S1 ; configure Y axis endstop
M574 Z1 P"io3.in" S1 ; configure Z axis endstop
; Heaters
M950 H1 C"out1" T1 ; create heater #1
M143 H1 P0 T1 C0 S285 A0 ; configure heater monitor #0 for heater #1
M307 H1 R2.43 D5.5 E1.35 K0.56 B0 ; configure model of heater #1
; Heated beds
M140 P0 H0 ; configure heated bed #0
; Spindles
;M950 C"io4.out+io2.out+io3.out" Q500 L60:10000 ; configure spindle #0
; Fans
M950 F0 C"out0" ; create fan #0
M106 P0 S0 L0 X1 B0.1 ; configure fan #0
; Tools
;M563 P0 D0 H1 F0 ; create tool #0
;M568 P0 R0 S0 ; set initial tool #0 active and standby temperatures to 0C
; Miscellaneous
M453 ; select CNC mode
I ran M564 S0 H0
the only motor response is my external driver which is ( M569 P0.1 S1 R0 T5:5:10:0) when I remove the closed loop feature the stepper motor
does move under M564 S0H0 Command but it is very noisy like running it on Sh*ty driver.
Thank you