@chrishamm so far so good. It looks like all the reset issues have gone away.
Posts made by Nuramori
-
RE: significant "Warning: SPI connection has been reset"posted in General Discussion
-
RE: significant "Warning: SPI connection has been reset"posted in General Discussion
@chrishamm A quick update. On an intuitive guess, I performed a "rpi-update" to update the Pi5 firmware. This seems to be working so far, as I have not had any issues at the moment, and am running a print. I will report back if this proves to be successful.
-
RE: significant "Warning: SPI connection has been reset"posted in General Discussion
@chrishamm logging level is set to "info"
This is the top portion of the config.json file.
"AutoUpdateFirmware": true, "PluginSupport": true, "RootPluginSupport": false, "PluginsFilename": "/opt/dsf/conf/plugins.txt", "PluginAutoRestartInterval": 2000, "LogLevel": "info", "SocketDirectory": "/run/dsf", "SocketFile": "dcs.sock", "StartErrorFile": "/run/dsf/dcs.err", "Backlog": 4, "SocketPollInterval": 2000, "BaseDirectory": "/opt/dsf/sd", "PluginDirectory": "/opt/dsf/plugins", "NoTerminateOnReset": false, "HostUpdateInterval": 4000, "MaxMessageAge": 60, "SpiDevice": "/dev/spidev0.0", "SpiBufferSize": 8192, "SpiTransferMode": 0, "SpiFrequency": 8000000, "SpiConnectTimeout": 500, "SpiTransferTimeout": 500, "SpiConnectionTimeout": 4000, "MaxSpiRetries": 3, "GpioChipDevice": "/dev/gpiochip4", "TransferReadyPin": 25, "CpuTemperaturePath": "/sys/class/thermal/thermal_zone0/temp", "CpuTemperatureDivider": 1000, "BufferedPrintCodes": 32, "BufferedMacroCodes": 16, "MaxCodesPerInput": 32, "MaxBufferSpacePerChannel": 1536, "MaxCodeBufferSize": 256, "MaxMessageLength": 4096, "FirmwareComments": [ "printing object", "MESH", "process", "stop printing object", "layer", "LAYER", "BEGIN_LAYER_OBJECT z=", "HEIGHT", "PRINTING", "REMAINING_TIME" ], "ModelUpdateInterval": 250, "MaxMachineModelLockTime": -1, "FileBufferSize": 32768, "FileInfoReadLimitHeader": 16384, "FileInfoReadLimitFooter": 262144, "MaxLayerHeight": 0.9, "LayerHeightFilters": [ -
RE: significant "Warning: SPI connection has been reset"posted in General Discussion
@chrishamm said in significant "Warning: SPI connection has been reset":
@Nuramori said in significant "Warning: SPI connection has been reset":
State: 5, disconnects: 9, timeouts: 9 total, 9 by SBC, IAP RAM available 0x24cfc
Those resets were caused by the SBC. What kind of microSD card do you have? Is it possible that you enabled
debuglogging at some point in/opt/dsf/conf/config.json? And do you have enough free space on the card, does it have enough voltage to ensure that the CPU isn't throttled? And can you confirm that the Pi has no excessive load spikes?I have this card:
SanDisk 128GB Ultra microSDXC UHS-I Memory Card with Adapter - Up to 140MB/s, C10, U1, Full HD, A1, MicroSD Card - SDSQUAB-128G-GN6MA [New Version]It’s running on a new Pi5 with 8gig memory. It has a lot of free space, as it was not an upgraded OS, but built clean off of raspianOS bookworm using the guidelines (I then moved my previous config files over onto the new SBC.).
Firmware 3.5.1 was running on this SBC without an issue.
I’ll check on the debug setting. There’s nothing else running on the SBC.
I have a dedicated meanwell PSU for the Pi5, and voltages are spot on, and ample amp supply for it.
-
significant "Warning: SPI connection has been reset"posted in General Discussion
Things were fine before I updated to 3.5.2, now I can barely get through homing the printhead before it fails.
I am on "Bookworm"Here's the M122:
6/26/2024, 12:10:44 AM m122 === Diagnostics === RepRapFirmware for Duet 3 MB6HC version 3.5.2 (2024-06-11 17:13:58) running on Duet 3 MB6HC v1.0 or earlier (SBC mode) Board ID: 08DJM-956L2-G43S4-6J1F2-3SJ6T-1A6QH Used output buffers: 1 of 40 (17 max) === RTOS === Static ram: 155360 Dynamic ram: 90232 of which 4656 recycled Never used RAM 73256, free system stack 143 words Tasks: SBC(2,rWait:,0.7%,797) HEAT(3,nWait 6,0.0%,323) Move(4,nWait 6,0.0%,234) CanReceiv(6,nWait 1,0.0%,771) CanSender(5,nWait 7,0.0%,334) CanClock(7,delaying,0.0%,339) TMC(4,nWait 6,9.6%,53) MAIN(2,running,89.6%,101) IDLE(0,ready,0.0%,29), total 100.0% Owned mutexes: HTTP(MAIN) === Platform === Last reset 00:23:42 ago, cause: power up Last software reset at 2024-06-25 23:38, reason: User, Gcodes spinning, available RAM 73328, slot 1 Software reset code 0x6003 HFSR 0x00000000 CFSR 0x00000000 ICSR 0x0043c000 BFAR 0x00000000 SP 0x00000000 Task SBC Freestk 0 n/a Error status: 0x00 Aux0 errors 0,0,0 MCU temperature: min 38.4, current 39.1, max 40.0 Supply voltage: min 23.9, current 24.0, max 24.1, under voltage events: 0, over voltage events: 0, power good: yes 12V rail voltage: min 12.0, current 12.0, max 12.0, under voltage events: 0 Heap OK, handles allocated/used 99/0, heap memory allocated/used/recyclable 2048/288/288, gc cycles 0 Events: 0 queued, 0 completed Driver 0: standstill, SG min n/a, mspos 856, reads 60402, writes 0 timeouts 0 Driver 1: standstill, SG min n/a, mspos 424, reads 60401, writes 0 timeouts 0 Driver 2: standstill, SG min 19, mspos 888, reads 60400, writes 2 timeouts 0 Driver 3: standstill, SG min 0, mspos 984, reads 60400, writes 2 timeouts 0 Driver 4: standstill, SG min n/a, mspos 456, reads 60402, writes 0 timeouts 0 Driver 5: standstill, SG min n/a, mspos 8, reads 60402, writes 0 timeouts 0 Date/time: 2024-06-26 00:09:45 Slowest loop: 24.91ms; fastest: 0.08ms === Storage === Free file entries: 20 SD card 0 not detected, interface speed: 37.5MBytes/sec SD card longest read time 0.0ms, write time 0.0ms, max retries 0 === Move === DMs created 125, segments created 18, maxWait 132035ms, bed compensation in use: none, height map offset 0.000, max steps late 0, min interval 0, bad calcs 0, ebfmin 0.00, ebfmax 0.00 no step interrupt scheduled Moves shaped first try 1, on retry 0, too short 0, wrong shape 0, maybepossible 0 === DDARing 0 === Scheduled moves 123, completed 123, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 1], CDDA state -1 === DDARing 1 === Scheduled moves 0, completed 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1 === Heat === Bed heaters 0 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1, chamber heaters -1 -1 -1 -1, ordering errs 0 === GCodes === Movement locks held by null, null HTTP* is doing "M122" in state(s) 0 Telnet is idle in state(s) 0 File* is idle in state(s) 0 USB is idle in state(s) 0 Aux is idle in state(s) 0 Trigger* is idle in state(s) 0 Queue is idle in state(s) 0 LCD is idle in state(s) 0 SBC is idle in state(s) 0 Daemon is idle in state(s) 0 Aux2 is idle in state(s) 0 Autopause is idle in state(s) 0 File2 is idle in state(s) 0 Queue2 is idle in state(s) 0 Q0 segments left 0, axes/extruders owned 0x80000007 Code queue 0 is empty Q1 segments left 0, axes/extruders owned 0x0000000 Code queue 1 is empty === CAN === Messages queued 422, received 936, lost 0, errs 0, boc 0 Longest wait 1ms for reply type 6013, peak Tx sync delay 6, free buffers 50 (min 49), ts 234/234/0 Tx timeouts 0,0,0,0,0,0 === SBC interface === Transfer state: 5, failed transfers: 0, checksum errors: 0 RX/TX seq numbers: 51918/277 SPI underruns 0, overruns 0 State: 5, disconnects: 9, timeouts: 9 total, 9 by SBC, IAP RAM available 0x24cfc Buffer RX/TX: 0/0-0, open files: 0 === Duet Control Server === Duet Control Server version 3.5.2 (2024-06-12 07:12:47, 64-bit) HTTP+Executed: > Executing M122 Code buffer space: 4096 Configured SPI speed: 8000000Hz, TfrRdy pin glitches: 0 Full transfers per second: 32.53, max time between full transfers: 30.8ms, max pin wait times: 26.8ms/0.1ms Codes per second: 0.06 Maximum length of RX/TX data transfers: 4379/1428 6/26/2024, 12:10:37 AM Warning: SPI connection has been reset -
RE: 3.5.0-B4, having random CAN error timeoutsposted in Beta Firmware
@dc42 I just had another out of memory occur related to the tool board - I have this patch applied (actually a more recent one I believe), and it ran out again.
-
RE: Reboots/resets randomly - RRF 3.5.0-b4posted in Beta Firmware
I had a reset as well, this one ANOTHER out of memory fault tied to the tool-board/CAN bus.
 It's at the point I can't do any large prints without the machine resetting half way through and wasting filament. Incredibly frustrating when you have it running 1-2 days only to quit on you before it finishes.
It's at the point I can't do any large prints without the machine resetting half way through and wasting filament. Incredibly frustrating when you have it running 1-2 days only to quit on you before it finishes. -
RE: presets on the dashboard don't match settingsposted in Duet Web Control
@chrishamm I see this on Safari and also on firefox. The firefox browser is on a PC, safari on MacOS. Same things on both.
-
RE: presets on the dashboard don't match settingsposted in Duet Web Control
@chrishamm, do you mean my config.g?
; Configuration file for Duet3 (firmware version 3.4 beta7) ; executed by the firmware on start-up ; ; --------------- Pin/connection Mapping Legend ------------------- ; 0.out0 - Bed heater ; 0.out1 ; 0.out2 ; 0.out3 ; 0.out4 - Radiator cooling fan - WC heatsink ; 0.out5 ; 0.out6 ; 0.out7 ; 0.out8 ; 0.out9 - Duet board cooling fan ; 0.out4.tach - Radiator cooling fan rpm wire - WC heatsink ; 0.out5.tach ; 0.out6.tach ; 0.io0.in ; 0.io1.in - Emergency stop switch ; 0.io2.in - Y max active low endstop switch ; 0.io3.in ; 0.io4.in ; 0.io5.in ; 0.io6.in ; 0.io7.in ; 0.io8.in ; 0.io0.out ; 0.io1.out ; 0.io2.out ; 0.io3.out ; 0.io4.out ; 0.io5.out ; 0.io6.out ; 0.io7.out ; 0.io8.out ; 0.servo, out10 (only on v0.5, not on v0.6) ; 0.pson ; 0.spi.cs0 ; 0.spi.cs1 ; 0.spi.cs2 ; 0.spi.cs3 ; 0.temp0 - Bed Thermistor ; 0.temp1 ; 0.temp2 ; 0.temp3 - Coolant Temp Sensor ; 0.mcu-temp - MCU sensor ; ;----------Toolboard 1 (CAN ID#20) ; 20.0 - Accelerometer ; 20.out0 - Hotend Heater ; 20.out1 - ; 20.out2 - Parts cooler on printhead ; 20.out1.tach - ; 20.out2.tach - ; 20.io0.in - Z probe type to bltouch current - Piezo future ; 20.io1.in - X min active low endstop switch ; 20.io2.in - ; 20.io3.in - ; 20.io0.out - GPIO port 0 on toolboard io0, servo mode - BLTouch Z-Probe ; 20.temp0 - Extruder Thermistor ; 20.temp1 - ; 20.button0 - ; 20.button1 - ; ; ----------------------------------------------------------------- ; ; General preferences M80 C"!pson" ; Declare the Power Pin (inverted for Meanwell) M80 ; Turn on the Power G4 P2000 ; Hold your Horses. G90 ; send absolute coordinates... M83 ; ...but relative extruder moves G21 ; Set units to Millimeters M550 P"DUET3" ; set printer name M575 P1 S1 B57600 ; Set things up for the PanelDue G4 S6 ; Wait for toolboard to start M584 X0.3 Y0.2 Z0.0:0.1:0.4 E20.0 ; set drive mapping to each axis M669 K1 ; Select CoreXY mode - New format ; Network ; M552 S1 ; enable network ; M586 P0 S1 ; enable HTTP ; M586 P1 S0 ; disable FTP ; M586 P2 S0 ; disable Telnet ; Drives M569 P0.0 S0 ; physical drive 0 goes backwards - Z Axis Left (1) M569 P0.1 S0 ; physical drive 1 goes backwards - Z Axis Right Back (2) M569 P0.2 S0 ; physical drive 2 goes backwards - Y Axis M569 P0.3 S0 ; physical drive 3 goes backwards - X Axis M569 P0.4 S0 ; physical drive 4 goes backwards - Z Axis Right Front (3) M569 P20.0 S1 ; physical drive 5 goes forwards - Extruder 1 ; Set up three Z-axis location M671 X-6:362:362 Y186:299:60 S5 ; Pivot Points at 1 - left, 2 - rear right and 3 - front right M92 X200 Y200 Z800 E1299 ; set steps per mm M350 X16 Y16 Z16 E16 I1 ; configure micro-stepping with interpolation M566 X600.00 Y600.00 Z100.00 E240.00 ; set maximum instantaneous speed changes (mm/min) M203 X16000.00 Y16000.00 Z400.00 E1200.00 ; set maximum speeds (mm/min) M201 X4000.00 Y4000.00 Z400.00 E800.00 ; set accelerations (mm/s^2) M906 X800 Y800 Z800 E800 I30 ; set motor currents (mA) and motor idle factor in percent*100 ; Set up Stealthcop Parameters ; M569 P0.0 V40 H5 ; M569 P0.1 V40 H5 ; M569 P0.2 V40 H5 ; M569 P0.3 V40 H5 ; M569 P0.4 V40 H5 ; M569 P20.0 V40 H5 ; M915 X Y Z E T1 M84 S30 ; Set idle timeout ; Axis Limits M208 X0 Y0 Z0 S1 ; set axis minima M208 X315 Y315 Z325 S0 ; set axis maxima ; Endstops M574 X1 S1 P"20.io1.in" ; X min active high endstop switch M574 Y2 S1 P"0.io2.in" ; Y max active high endstop switch ; Z-Probe - BLTouch - *CURRENT* M574 Z1 S2 ; set endstops controlled by probe M558 P9 C"^20.io0.in" H5 F2000 T12000 ; set Z probe type to bltouch and the dive height + speeds (bltouch NEEDS pullup) G31 P100 X0 Y-20 Z3.85 ; set Z probe trigger value, offset and trigger height - 0.40MM NOZZLE FIXED Kv1 ; Configure Heaters and Sensors M308 S0 P"0.temp0" Y"thermistor" A"Bed Heat" T100000 B3950 ; Configure bed temperature sensor M950 H0 C"0.out0" T0 ; Define heater 0 (bed heater) - bed_heat pin and Temp Sensor 0 M140 H0 ; Map heated bed to heater 0 M143 H0 P0 S120 A2 ; set temperature limit for heater 0 to 120c M308 S1 P"20.temp0" Y"pt1000" A"Mosquito" ; Configure extruder 1 temperature sensor - Mosquito M950 H1 C"20.out0" T1 ; Define heater 1 (hot-end E0) to use the "20.out0" pin and Temp Sensor 1 M143 H1 S280 A2 ; set temperature limit for heater 1 to 280C M308 S2 P"mcu-temp" Y"mcu-temp" A"Duet Board" ; Configure MCU sensor M308 S3 P"temp3" Y"thermistor" T10000 B3988 A"Coolant" ; Configure coolant sensor M308 S4 P"drivers" Y"drivers" A"Duet stepper drivers" ; defines sensor 4 as stepper driver temperature sensor ; Configure Fans M950 F0 C"20.out2" Q100 ; Define Fan_0 for use - Parts Cooler on Printhead - 5015 fan M950 F1 C"0.out9" Q25000 ; Define Fan_1 for use - Duet board cooling fan M950 F2 C"!0.out4+^0.out4.tach" Q25000 ; Define Fan_1 for use - Radiator cooling - WC heatsink. - PWM fan M950 S0 C"20.io0.out" ; Define GPIO port 0 on IO0, servo mode - BLTouch Z-Probe - *CURRENT* M950 J0 C"^!0.io1.in" ; Input 0 uses 0.io1.in pin, pullup enabled ; Fans M106 P0 S0 ; set fan 0. Parts Cooler on Printhead M106 P1 H2:4 T40:70 ; Set fan 1. Manages Duet board fan. M106 P2 H3 T35:50 ; Set fan 1. Manages Radiator fan for water-cooled loop. ;Set PID values M307 H0 R0.731 K0.271:0.000 D1.85 E1.35 S1.00 B0 ; disable bang-bang mode for the bed heater and set PWM limit M307 H1 R2.839 K0.347:0.134 D6.69 E1.35 S1.00 B0 V23.8 ; disable bang-bang mode for the extruder heater and set PWM limit ; Pressure Advance M572 D0 S0.08 ; Set pressure advance to offset elasticity ; Dynamic Acceleration Adjustment and Non-linear ; M592 D0 A0.005 B0.0012 L0.2 M593 P"ei2" F296.5 S0.005 ; Set Movement Queue M595 P100 ; Set up Accelerometer M955 P20.0 I12 ; Accelerometer on toolboard, oriented counter clockwise 90 Enable for RRF 3.3 Stable ; Tools M563 P0 S"Printhead" D0 H1 F0 ; define tool 0. Fan 0 operates with an active hot-end G10 L1 P0 X0 Y0 Z0 ; set tool 0 axis offsets - - - X15 Y18 - Bed 0,0 G10 P0 R0 S0 ; set active and standby temperatures to 0C ; Emergency Stop M574 S1 P"^!0.io1.in" ; Define Emergency endstop - emergency stop switch condition M581 P0 S1 T0 ; Define action to be taken with activation of emergency stop switch ; Miscellaneous T0 ; select first tool M98 P"homeall.g" ; Home XI see this on my screen...
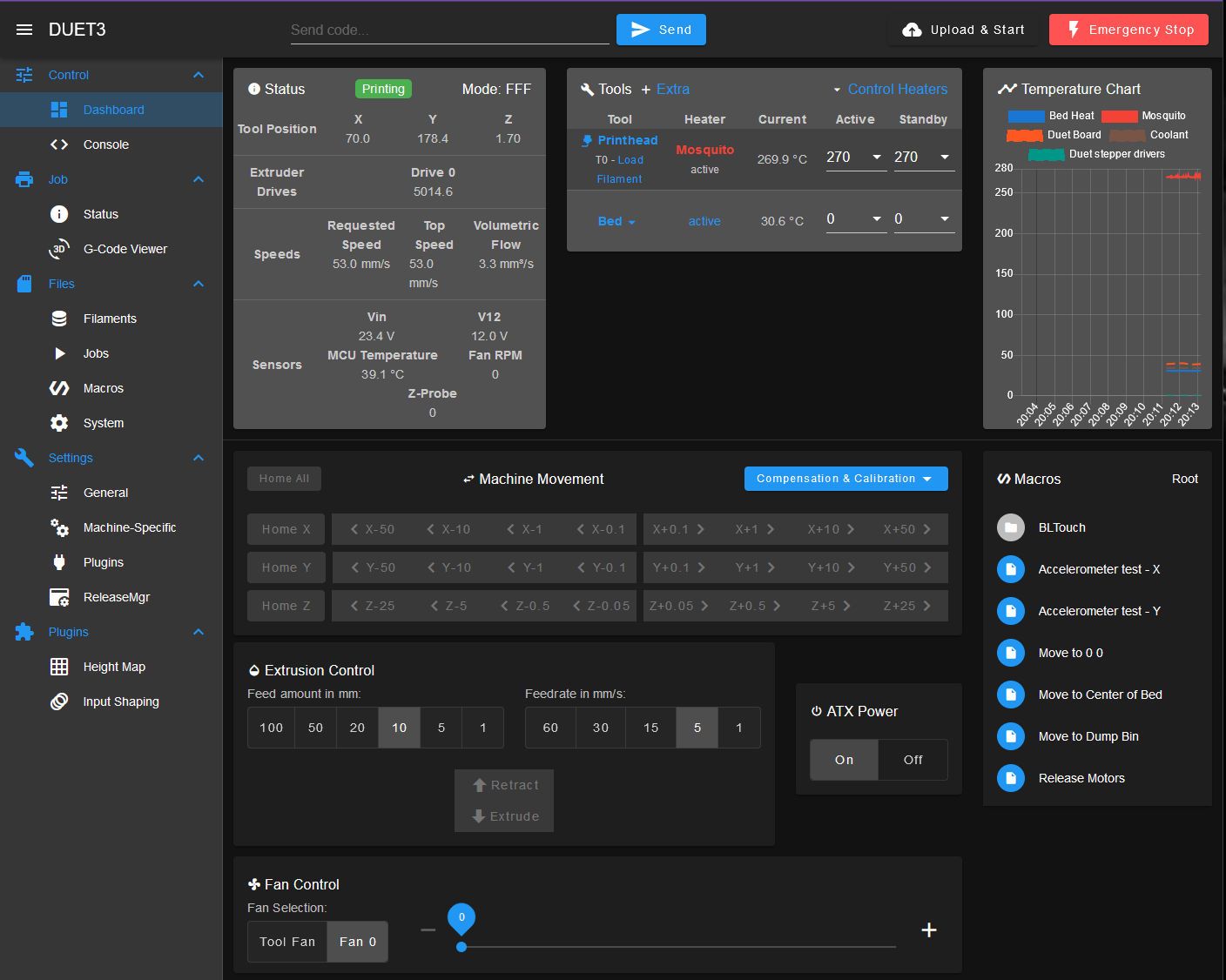
on the dashboard I see this....
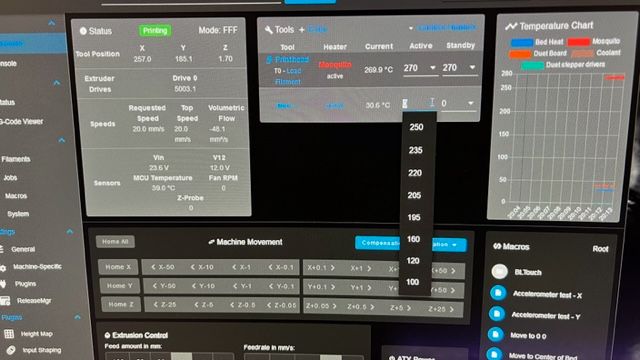
the pulldown shows this....
-
presets on the dashboard don't match settingsposted in Duet Web Control
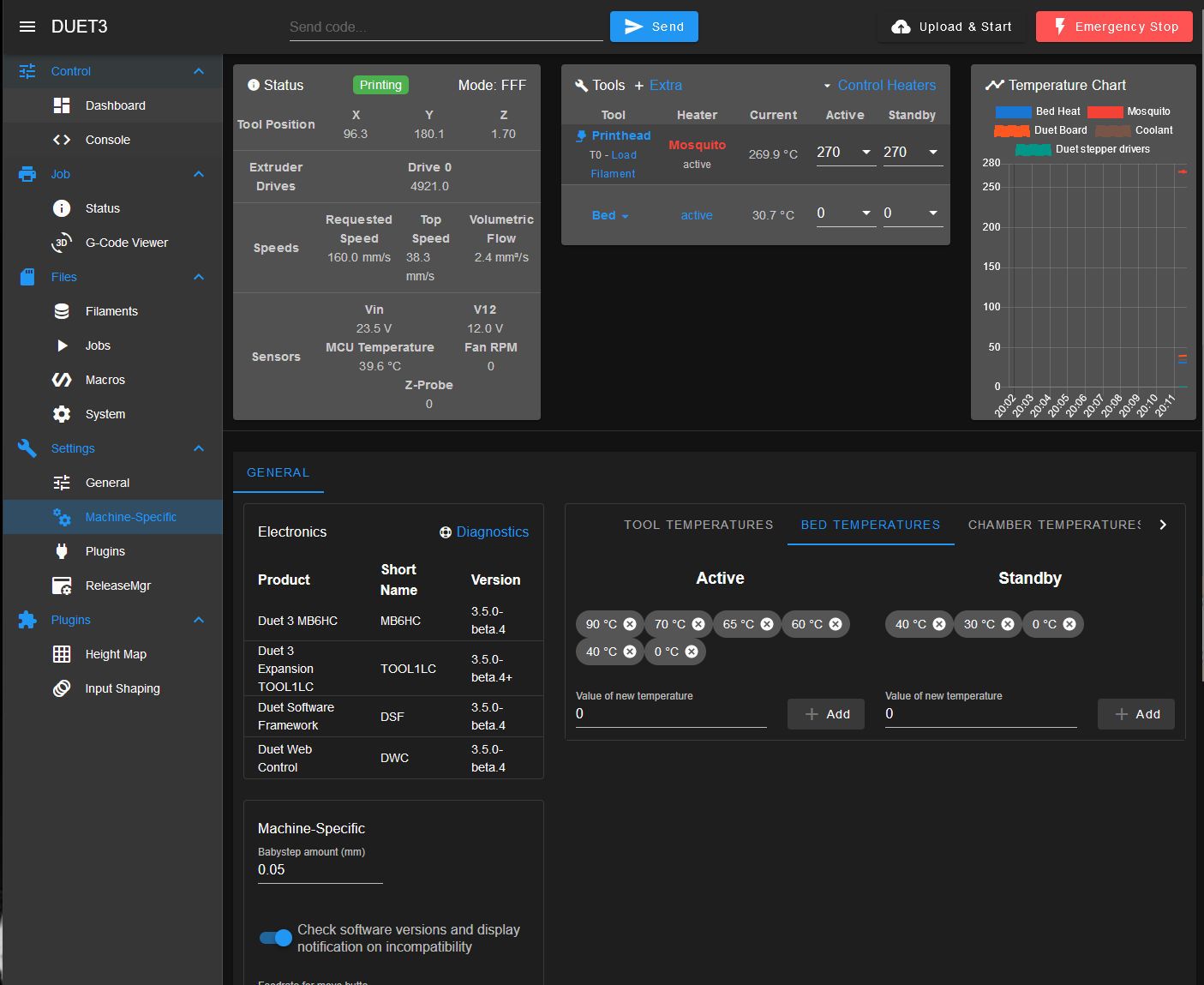
I noticed with 3.5.0-B4 the bed temperatures available for the bed presets are the same as the toolhead(!!!!) not the ones that are in the settings under "machine specific."
I certainly hope that no one can actually set their bed temperature to 270c.
This is new; it wasn't an issue prior to the beta update.
-
RE: 3.5.0-B4, having random CAN error timeoutsposted in Beta Firmware
@dc42 switching to ei2 has led to successful print completions. Thanks for the work around suggestion.
-
RE: 3.5.0-B4, having random CAN error timeoutsposted in Beta Firmware
@dc42 said in 3.5.0-B4, having random CAN error timeouts:
zvdd
Thanks, I'll switch to ei2 to see if that helps. I looked at the issue info you created - an added note, I am in fact using a raspberry pi 4 with this.
currently all I have on the toolboard are, extruder, fan, heater, and temp sensor.
-
RE: 3.5.0-B4, having random CAN error timeoutsposted in Beta Firmware
@dc42 Actually, this was different gcode (but far simpler - just two rings out of TPU). Here's the gcode for the file that generated the error....
config.g
; Configuration file for Duet3 (firmware version 3.4 beta7) ; executed by the firmware on start-up ; ; --------------- Pin/connection Mapping Legend ------------------- ; 0.out0 - Bed heater ; 0.out1 ; 0.out2 ; 0.out3 ; 0.out4 - Radiator cooling fan - WC heatsink ; 0.out5 ; 0.out6 ; 0.out7 ; 0.out8 ; 0.out9 - Duet board cooling fan ; 0.out4.tach - Radiator cooling fan rpm wire - WC heatsink ; 0.out5.tach ; 0.out6.tach ; 0.io0.in ; 0.io1.in - Emergency stop switch ; 0.io2.in - Y max active low endstop switch ; 0.io3.in ; 0.io4.in ; 0.io5.in ; 0.io6.in ; 0.io7.in ; 0.io8.in ; 0.io0.out ; 0.io1.out ; 0.io2.out ; 0.io3.out ; 0.io4.out ; 0.io5.out ; 0.io6.out ; 0.io7.out ; 0.io8.out ; 0.servo, out10 (only on v0.5, not on v0.6) ; 0.pson ; 0.spi.cs0 ; 0.spi.cs1 ; 0.spi.cs2 ; 0.spi.cs3 ; 0.temp0 - Bed Thermistor ; 0.temp1 ; 0.temp2 ; 0.temp3 - Coolant Temp Sensor ; 0.mcu-temp - MCU sensor ; ;----------Toolboard 1 (CAN ID#20) ; 20.0 - Accelerometer ; 20.out0 - Hotend Heater ; 20.out1 - ; 20.out2 - Parts cooler on printhead ; 20.out1.tach - ; 20.out2.tach - ; 20.io0.in - Z probe type to bltouch current - Piezo future ; 20.io1.in - X min active low endstop switch ; 20.io2.in - ; 20.io3.in - ; 20.io0.out - GPIO port 0 on toolboard io0, servo mode - BLTouch Z-Probe ; 20.temp0 - Extruder Thermistor ; 20.temp1 - ; 20.button0 - ; 20.button1 - ; ; ----------------------------------------------------------------- ; ; General preferences M80 C"!pson" ; Declare the Power Pin (inverted for Meanwell) M80 ; Turn on the Power G4 P2000 ; Hold your Horses. G90 ; send absolute coordinates... M83 ; ...but relative extruder moves G21 ; Set units to Millimeters M550 P"DUET3" ; set printer name M575 P1 S1 B57600 ; Set things up for the PanelDue G4 S6 ; Wait for toolboard to start M584 X0.3 Y0.2 Z0.0:0.1:0.4 E20.0 ; set drive mapping to each axis M669 K1 ; Select CoreXY mode - New format ; Network ; M552 S1 ; enable network ; M586 P0 S1 ; enable HTTP ; M586 P1 S0 ; disable FTP ; M586 P2 S0 ; disable Telnet ; Drives M569 P0.0 S0 ; physical drive 0 goes backwards - Z Axis Left (1) M569 P0.1 S0 ; physical drive 1 goes backwards - Z Axis Right Back (2) M569 P0.2 S0 ; physical drive 2 goes backwards - Y Axis M569 P0.3 S0 ; physical drive 3 goes backwards - X Axis M569 P0.4 S0 ; physical drive 4 goes backwards - Z Axis Right Front (3) M569 P20.0 S1 ; physical drive 5 goes forwards - Extruder 1 ; Set up three Z-axis location M671 X-6:362:362 Y186:299:60 S5 ; Pivot Points at 1 - left, 2 - rear right and 3 - front right M92 X200 Y200 Z800 E1299 ; set steps per mm M350 X16 Y16 Z16 E16 I1 ; configure micro-stepping with interpolation M566 X600.00 Y600.00 Z100.00 E240.00 ; set maximum instantaneous speed changes (mm/min) M203 X16000.00 Y16000.00 Z400.00 E1200.00 ; set maximum speeds (mm/min) M201 X4000.00 Y4000.00 Z400.00 E800.00 ; set accelerations (mm/s^2) M906 X800 Y800 Z800 E800 I30 ; set motor currents (mA) and motor idle factor in percent*100 ; Set up Stealthcop Parameters ; M569 P0.0 V40 H5 ; M569 P0.1 V40 H5 ; M569 P0.2 V40 H5 ; M569 P0.3 V40 H5 ; M569 P0.4 V40 H5 ; M569 P20.0 V40 H5 ; M915 X Y Z E T1 M84 S30 ; Set idle timeout ; Axis Limits M208 X0 Y0 Z0 S1 ; set axis minima M208 X315 Y315 Z325 S0 ; set axis maxima ; Endstops M574 X1 S1 P"20.io1.in" ; X min active high endstop switch M574 Y2 S1 P"0.io2.in" ; Y max active high endstop switch ; Z-Probe - BLTouch - *CURRENT* M574 Z1 S2 ; set endstops controlled by probe M558 P9 C"^20.io0.in" H5 F2000 T12000 ; set Z probe type to bltouch and the dive height + speeds (bltouch NEEDS pullup) G31 P100 X0 Y-20 Z3.85 ; set Z probe trigger value, offset and trigger height - 0.40MM NOZZLE FIXED Kv1 ; Configure Heaters and Sensors M308 S0 P"0.temp0" Y"thermistor" A"Bed Heat" T100000 B3950 ; Configure bed temperature sensor M950 H0 C"0.out0" T0 ; Define heater 0 (bed heater) - bed_heat pin and Temp Sensor 0 M140 H0 ; Map heated bed to heater 0 M143 H0 P0 S120 A2 ; set temperature limit for heater 0 to 120c M308 S1 P"20.temp0" Y"pt1000" A"Mosquito" ; Configure extruder 1 temperature sensor - Mosquito M950 H1 C"20.out0" T1 ; Define heater 1 (hot-end E0) to use the "20.out0" pin and Temp Sensor 1 M143 H1 S280 A2 ; set temperature limit for heater 1 to 280C M308 S2 P"mcu-temp" Y"mcu-temp" A"Duet Board" ; Configure MCU sensor M308 S3 P"temp3" Y"thermistor" T10000 B3988 A"Coolant" ; Configure coolant sensor M308 S4 P"drivers" Y"drivers" A"Duet stepper drivers" ; defines sensor 4 as stepper driver temperature sensor ; Configure Fans M950 F0 C"20.out2" Q100 ; Define Fan_0 for use - Parts Cooler on Printhead - 5015 fan M950 F1 C"0.out9" Q25000 ; Define Fan_1 for use - Duet board cooling fan M950 F2 C"!0.out4+^0.out4.tach" Q25000 ; Define Fan_1 for use - Radiator cooling - WC heatsink. - PWM fan M950 S0 C"20.io0.out" ; Define GPIO port 0 on IO0, servo mode - BLTouch Z-Probe - *CURRENT* M950 J0 C"^!0.io1.in" ; Input 0 uses 0.io1.in pin, pullup enabled ; Fans M106 P0 S0 ; set fan 0. Parts Cooler on Printhead M106 P1 H2:4 T40:70 ; Set fan 1. Manages Duet board fan. M106 P2 H3 T35:50 ; Set fan 1. Manages Radiator fan for water-cooled loop. ;Set PID values M307 H0 R0.731 K0.271:0.000 D1.85 E1.35 S1.00 B0 ; disable bang-bang mode for the bed heater and set PWM limit M307 H1 R2.839 K0.347:0.134 D6.69 E1.35 S1.00 B0 V23.8 ; disable bang-bang mode for the extruder heater and set PWM limit ; Pressure Advance M572 D0 S0.08 ; Set pressure advance to offset elasticity ; Dynamic Acceleration Adjustment and Non-linear ; M592 D0 A0.005 B0.0012 L0.2 M593 P"ei3" F296.5 S0.005 ; Set Movement Queue M595 P100 ; Set up Accelerometer M955 P20.0 I12 ; Accelerometer on toolboard, oriented counter clockwise 90 Enable for RRF 3.3 Stable ; Tools M563 P0 S"Printhead" D0 H1 F0 ; define tool 0. Fan 0 operates with an active hot-end G10 L1 P0 X0 Y0 Z0 ; set tool 0 axis offsets - - - X15 Y18 - Bed 0,0 G10 P0 R0 S0 ; set active and standby temperatures to 0C ; Emergency Stop M574 S1 P"^!0.io1.in" ; Define Emergency endstop - emergency stop switch condition M581 P0 S1 T0 ; Define action to be taken with activation of emergency stop switch ; Miscellaneous T0 ; select first tool M98 P"homeall.g" ; Home Xhoming macro that's called:
; homeall.g ; called to home all axes ; ; generated by RepRapFirmware Configuration Tool on Tue Oct 09 2018 13:27:56 GMT+0300 G91 ; relative positioning ; Home all axis M98 P"homex.g" ; Home X M98 P"homey.g" ; Home Y M98 P"homez.g" ; Home Z G90 ; absolute positioningindividual axis macros tha's called in homeall.g:
homex.g
; homex.g ; called to home the X axis ; G91 ; relative positioning ; Initiate tuning movement sequence for Stealthcop ; G1 H2 X0.02 F1000 ; G4 P50 G1 H2 Z3 F1000 ; Drop Z 3mm G1 H2 X5 Y5 F4000 ; move X away a little so the switch is not pressed G1 H1 X-400 F4000 ; move left 400mm, stopping at the endstop G1 X5 F4000 ; move away for second pass G4 P500 ; wait 500msec G1 H3 X-300 F300 ; (second pass) G1 X15 F4000 ; move away from end G1 H2 Z-3 F1000 ; Raise z back G90 ; back to absolute positioning G4 P100 ; wait 400mshomey.g
; homey.g ; called to home the y axis ; G91 ; use relative positioning ; Initiate tuning movement sequence for Stealthcop ; G1 H2 Y0.02 F1000 ; G4 P50 G1 H2 Z3 F1000 ; Drop Z 3mm G1 H2 X5 Y5 F4000 ; ensure gantry is clear G1 H1 Y400 F4000 ; move to the front 400mm, stopping at the endstop G1 Y-5 F4000 ; move away for second pass G4 P500 ; wait 500msec G1 H3 Y400 F300 ; (second pass) G1 Y-15 F4000 ; move away from end G1 H2 Z-3 F1000 ; Raise Z back G90 ; back to absolute positioning G4 P100 ; wait 400mshomez.g
; homez.g ; called to home the Z axis ; ; generated by RepRapFirmware Configuration Tool on Tue Oct 09 2018 13:27:56 GMT+0300 G91 ; relative positioning ; Initiate tuning movement sequence for Stealthcop ; G1 H2 Z0.02 F1000 ; G4 P50 G1 H2 Z10 F1000 ; Drop Z relative to current position G90 ; absolute positioning G1 X162.5 Y172.5 F16000 ; go to first probe point G30 ; home Z by probing the bed ; Uncomment the following lines to lift Z after probing G91 ; relative positioning G1 H2 Z10 F1000 ; lower Z a bit more G90 ; absolute positioning -
RE: 3.5.0-B4, having random CAN error timeoutsposted in Beta Firmware
@dc42 I was able to finally capture the data - unless I read it wrong, it's an out of memory fault? Here's the M122 I was able to get for both the main board and toolboard.
6/19/2023, 7:20:14 AM Diagnostics for board 20: Duet TOOL1LC rev 1.1 or later firmware version 3.5.0-beta.4 (2023-06-08 16:22:30) Bootloader ID: SAMC21 bootloader version 2.4 (2021-12-10) All averaging filters OK Never used RAM 660, free system stack 142 words Tasks: Move(3,nWait,0.0%,119) HEAT(2,nWait,0.1%,101) CanAsync(5,nWait,0.0%,54) CanRecv(3,nWait,0.0%,75) CanClock(5,nWait,0.0%,66) ACCEL(3,nWait,0.0%,53) TMC(2,delaying,3.0%,57) MAIN(1,running,92.0%,438) IDLE(0,ready,0.0%,27) AIN(2,delaying,4.9%,142), total 100.0% Last reset 00:00:22 ago, cause: software Last software reset at 2023-06-19 07:19, reason: OutOfMemory, available RAM 16, slot 0 Software reset code 0x01c0 ICSR 0x00000000 SP 0x200054a8 Task Move Freestk 137 ok Stack: 200057b0 000062df 00000000 20005114 30e4cc09 00009f99 200057c8 00007d19 0001eaea 388e7c4b 449dc61b 00000002 3db25835 360d022f 200057f8 200057e0 200068c4 00000000 464c15d3 31a06276 31a06276 2000554c 20006908 20005108 00000000 00008c91 00000000 Driver 0: pos 0, 80.0 steps/mm, standstill, SG min 2, read errors 0, write errors 1, ifcnt 29, reads 11416, writes 9, timeouts 0, DMA errors 0, CC errors 0, steps req 0 done 0 Moves scheduled 28, completed 0, in progress 1, hiccups 0, step errors 0, maxPrep 350, maxOverdue 0, maxInc 0, mcErrs 0, gcmErrs 1, ebfmin 0.00, ebfmax 0.00 Peak sync jitter 5/9, peak Rx sync delay 207, resyncs 0/0, no timer interrupt scheduled VIN voltage: min 24.2, current 24.2, max 24.3 MCU temperature: min 56.8C, current 56.8C, max 59.4C Last sensors broadcast 0x00000000 found 0 144 ticks ago, 0 ordering errs, loop time 0 CAN messages queued 209, send timeouts 0, received 245, lost 0, free buffers 18, min 0, error reg 0 dup 0, oos 0/0/0/0, bm 0, wbm 0, rxMotionDelay 34260, adv -1177163/957204334 Accelerometer: LIS3DH, status: 00 I2C bus errors 0, naks 3, other errors 0 6/19/2023, 7:20:14 AM === Diagnostics === RepRapFirmware for Duet 3 MB6HC version 3.5.0-beta.4 (2023-06-08 23:41:30) running on Duet 3 MB6HC v1.0 or earlier (SBC mode) Board ID: 08DJM-956L2-G43S4-6J1F2-3SJ6T-1A6QH Used output buffers: 1 of 40 (18 max) === RTOS === Static ram: 155012 Dynamic ram: 87164 of which 4080 recycled Never used RAM 76264, free system stack 122 words Tasks: SBC(2,rWait:,18.0%,422) HEAT(3,nWait,0.4%,323) Move(4,nWait,26.1%,214) CanReceiv(6,nWait,0.5%,771) CanSender(5,nWait,0.4%,328) CanClock(7,delaying,0.1%,349) TMC(4,nWait,155.7%,59) MAIN(2,running,339.1%,135) IDLE(0,ready,0.6%,30), total 540.8% Owned mutexes: Autopause(MAIN) === Platform === Last reset 06:43:25 ago, cause: power up Last software reset at 2023-06-15 03:41, reason: User, Gcodes spinning, available RAM 75808, slot 0 Software reset code 0x6003 HFSR 0x00000000 CFSR 0x00000000 ICSR 0x0044a000 BFAR 0x00000000 SP 0x00000000 Task SBC Freestk 0 n/a Error status: 0x00 Aux0 errors 0,0,0 MCU temperature: min 31.4, current 39.0, max 40.4 Supply voltage: min 22.7, current 23.4, max 24.0, under voltage events: 0, over voltage events: 0, power good: yes 12V rail voltage: min 12.0, current 12.0, max 12.1, under voltage events: 0 Heap OK, handles allocated/used 99/7, heap memory allocated/used/recyclable 2048/276/164, gc cycles 0 Events: 1 queued, 0 completed Driver 0: ok, SG min 0, mspos 440, reads 29458, writes 21 timeouts 0 Driver 1: ok, SG min 0, mspos 808, reads 29458, writes 21 timeouts 0 Driver 2: ok, SG min 0, mspos 522, reads 29454, writes 25 timeouts 0 Driver 3: ok, SG min 0, mspos 170, reads 29454, writes 25 timeouts 0 Driver 4: ok, SG min 0, mspos 936, reads 29458, writes 21 timeouts 0 Driver 5: standstill, SG min 0, mspos 8, reads 29468, writes 11 timeouts 0 Date/time: 2023-06-19 07:20:12 Slowest loop: 93.93ms; fastest: 0.05ms === Storage === Free file entries: 20 SD card 0 not detected, interface speed: 37.5MBytes/sec SD card longest read time 0.0ms, write time 0.0ms, max retries 0 === Move === DMs created 125, segments created 59, maxWait 2492950ms, bed compensation in use: mesh, height map offset 0.000, ebfmin 0.00, ebfmax 0.00 no step interrupt scheduled === DDARing 0 === Scheduled moves 322093, completed 322093, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 4], CDDA state -1 === DDARing 1 === Scheduled moves 0, completed 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1 === Heat === Bed heaters 0 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1, chamber heaters -1 -1 -1 -1, ordering errs 0 Heater 0 is on, I-accum = 0.0 === GCodes === Movement locks held by null, null HTTP* is idle in state(s) 0 Telnet is idle in state(s) 0 File* is idle in state(s) 0 USB is idle in state(s) 0 Aux is idle in state(s) 0 Trigger* is idle in state(s) 0 Queue* is idle in state(s) 0 LCD is idle in state(s) 0 SBC is idle in state(s) 0 Daemon is idle in state(s) 0 Aux2 is idle in state(s) 0 Autopause* is doing "M122" in state(s) 0 74, running macro File2* is idle in state(s) 0 Queue2 is idle in state(s) 0 Q0 segments left 0, axes/extruders owned 0x80000007 Code queue 0 is empty Q1 segments left 0, axes/extruders owned 0x0000000 Code queue 1 is empty === CAN === Messages queued 522974, received 483920, lost 0, boc 0 Longest wait 3ms for reply type 6013, peak Tx sync delay 44962, free buffers 50 (min 49), ts 121028/121027/0 Tx timeouts 0,0,0,0,0,0 === SBC interface === Transfer state: 5, failed transfers: 0, checksum errors: 0 RX/TX seq numbers: 39804/39804 SPI underruns 0, overruns 0 State: 5, disconnects: 0, timeouts: 0 total, 0 by SBC, IAP RAM available 0x25ce8 Buffer RX/TX: 2696/2728-0, open files: 0 === Duet Control Server === Duet Control Server version 3.5.0-beta.4 (2023-06-09 10:49:49) Autopause+ProcessInternally: >> Macro expansion-reconnect.g: Executing M0 File /opt/dsf/sd/gcodes/TPU - BLVMGNC300 - seal.gcode is selected, cancelled Autopause: Buffered code: M0 Buffered codes: 24 bytes total >> Doing macro expansion-reconnect.g, started by system Code buffer space: 4072 Configured SPI speed: 8000000Hz, TfrRdy pin glitches: 0 Full transfers per second: 42.90, max time between full transfers: 81.7ms, max pin wait times: 69.3ms/7.7ms Codes per second: 40.54 Maximum length of RX/TX data transfers: 5020/1996Once this happens, a lot of things occur. I have a expansion-disconnect.g file that I set up to capture the info. I get this:
6/19/2023, 7:20:14 AM Error in start-up file expansion-reconnect.g line 8: M562: Board 20 does not have heater 1 6/19/2023, 7:20:14 AM Error: M562: Board 20 does not have heater 1 6/19/2023, 7:20:14 AM X:150.000 Y:0.000 Z:9.400 E:1465.104 E0:9809.6 Count 30000 30000 7426 Machine 150.000 0.000 9.400 Bed comp -0.118 6/19/2023, 7:20:14 AM Printing paused at X237.6 Y133.8 Z4.4 6/19/2023, 7:19:52 AM Resume state savedThe contents of the expansion disconnect.g file is:
M25 M114 M562 M122 M122 B20 M0Once the fault happens, it can't see the heater that's on the toolboard, so it can't be reset for the heat fault that registers because the CAN connection failed.
-
RE: 3.5.0-B4, having random CAN error timeoutsposted in Beta Firmware
@deckingman It's really strange. it's ONLY this one file that causes the CAN timeout. I've printed now, 8 files, some smaller some larger and move complex with rapid movements, and none have caused the error this one file does. I narrowed it down to where it might happen in the gcode, but nothing looks odd. (Z3.4-ish) in the file. It's frustrating, as this is the last part I need for a project.
Maybe you guys can discover something in it. - problem gcode?
-
RE: 3.5.0-B4, having random CAN error timeoutsposted in Beta Firmware
@dc42 it’s still failing, but I again neglected to check the lights. This time the tool head will continue to move, with the fan on, but the extruder temp reports 2000c and goes inactive, but continues to make the position moves along all axis. This appears to be happening at about the same point in this particular file. I have printed other files as a check, and they seem to work fine. The point of failure seems to be approximately where a support skin is formed and is about to make the first parts skin on top of that, meaning that separation layer where a bond is to be weak or non existent (I assume why the fan was on). Before printing I had redone an auto tune which was successful.
I did not get any can disconnect messages.
-
RE: 3.5.0-B4, having random CAN error timeoutsposted in Beta Firmware
@dc42 It's consistently happened only (so far) with this one print. I have since it occured, printed other things successfully now. It IS a long print (11 hours). Everything goes back to normal once I reset.
I'll try again and if it fails, I'll look for the lights status.
-
RE: 3.5.0-B4, having random CAN error timeoutsposted in Beta Firmware
BTW this is the error messag on screen when it now reports a temp fault
M562 P1
Error: M562: Response timeout: CAN addr 20, req type 6013, RID=382 -
3.5.0-B4, having random CAN error timeoutsposted in Beta Firmware
and it's getting frustrating. I was able to do a M122 on the board, but M122 B20 (for the toolboard) results in no communication once the error happens.
Below is the M122 report.... @dc42... help

6/13/2023, 10:52:56 AM M122 === Diagnostics === RepRapFirmware for Duet 3 MB6HC version 3.5.0-beta.4 (2023-06-08 23:41:30) running on Duet 3 MB6HC v1.0 or earlier (SBC mode) Board ID: 08DJM-956L2-G43S4-6J1F2-3SJ6T-1A6QH Used output buffers: 1 of 40 (17 max) === RTOS === Static ram: 155012 Dynamic ram: 87036 of which 4208 recycled Never used RAM 75952, free system stack 143 words Tasks: SBC(2,ready,3.3%,422) HEAT(3,nWait,0.1%,323) Move(4,nWait,4.3%,214) CanReceiv(6,nWait,0.1%,794) CanSender(5,nWait,0.1%,328) CanClock(7,delaying,0.0%,349) TMC(4,nWait,27.3%,59) MAIN(2,running,64.6%,135) IDLE(0,ready,0.3%,30), total 100.0% Owned mutexes: HTTP(MAIN) === Platform === Last reset 02:19:16 ago, cause: power up Last software reset at 2023-06-12 22:17, reason: User, Gcodes spinning, available RAM 80008, slot 1 Software reset code 0x6003 HFSR 0x00000000 CFSR 0x00000000 ICSR 0x0044a000 BFAR 0x00000000 SP 0x00000000 Task SBC Freestk 0 n/a Error status: 0x00 Aux0 errors 0,0,0 MCU temperature: min 33.9, current 39.9, max 40.2 Supply voltage: min 23.3, current 23.4, max 24.0, under voltage events: 0, over voltage events: 0, power good: yes 12V rail voltage: min 12.0, current 12.0, max 12.1, under voltage events: 0 Heap OK, handles allocated/used 99/1, heap memory allocated/used/recyclable 2048/20/0, gc cycles 0 Events: 1 queued, 1 completed Driver 0: ok, SG min 0, mspos 398, reads 43933, writes 25 timeouts 0 Driver 1: ok, SG min 0, mspos 798, reads 43933, writes 25 timeouts 0 Driver 2: ok, SG min 0, mspos 717, reads 43933, writes 25 timeouts 0 Driver 3: ok, SG min 0, mspos 325, reads 43933, writes 25 timeouts 0 Driver 4: ok, SG min 0, mspos 910, reads 43934, writes 25 timeouts 0 Driver 5: standstill, SG min n/a, mspos 8, reads 43948, writes 11 timeouts 0 Date/time: 2023-06-13 15:52:54 Slowest loop: 96.83ms; fastest: 0.06ms === Storage === Free file entries: 20 SD card 0 not detected, interface speed: 37.5MBytes/sec SD card longest read time 0.0ms, write time 0.0ms, max retries 0 === Move === DMs created 125, segments created 72, maxWait 170402ms, bed compensation in use: mesh, height map offset 0.000, ebfmin 0.00, ebfmax 0.00 next step interrupt due in 11 ticks, disabled === DDARing 0 === Scheduled moves 97088, completed 97069, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state 3 === DDARing 1 === Scheduled moves 0, completed 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1 === Heat === Bed heaters 0 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1, chamber heaters -1 -1 -1 -1, ordering errs 0 Heater 0 is on, I-accum = 0.1 === GCodes === Movement locks held by null, null HTTP* is doing "M122" in state(s) 0 Telnet is idle in state(s) 0 File* is idle in state(s) 3 USB is idle in state(s) 0 Aux is idle in state(s) 0 Trigger* is idle in state(s) 0 Queue* is idle in state(s) 0 LCD is idle in state(s) 0 SBC is idle in state(s) 0 Daemon is idle in state(s) 0 Aux2 is idle in state(s) 0 Autopause is idle in state(s) 0 File2* is idle in state(s) 0 Queue2 is idle in state(s) 0 Q0 segments left 5, axes/extruders owned 0x80000007 Code queue 0 is empty Q1 segments left 0, axes/extruders owned 0x0000000 Code queue 1 is empty === CAN === Messages queued 168787, received 166803, lost 0, boc 0 Longest wait 3ms for reply type 6053, peak Tx sync delay 27519, free buffers 50 (min 48), ts 41783/41782/0 Tx timeouts 0,0,0,0,0,0 === SBC interface === Transfer state: 5, failed transfers: 0, checksum errors: 0 RX/TX seq numbers: 22757/22757 SPI underruns 0, overruns 0 State: 5, disconnects: 0, timeouts: 0 total, 0 by SBC, IAP RAM available 0x25ce8 Buffer RX/TX: 3912/1360-4056, open files: 0 === Duet Control Server === Duet Control Server version 3.5.0-beta.4 (2023-06-09 10:49:49) File /opt/dsf/sd/gcodes/PETG - BLVMGNC300_Mirror Frame.gcode is selected, processing File: Buffered code: G1 X199.225 Y73.889 E3026.3652 Buffered code: G1 X199.233 Y69.363 E3026.47961 Buffered code: G1 X62.473 Y69.588 E3029.9366 Buffered code: G1 X62.126 Y69.436 E3029.94617 Buffered code: G1 X61.925 Y69.286 E3029.95251 Buffered code: G1 X61.653 Y68.828 E3029.96598 Buffered code: G1 X61.643 Y65.84 E3030.04151 Buffered code: G1 X56.788 Y65.84 E3030.16423 Buffered code: G1 X56.789 Y251.139 E3034.84816 Buffered code: G1 X61.642 Y251.139 E3034.97083 Buffered code: G1 X61.646 Y248.215 E3035.04475 Buffered code: G1 X61.841 Y247.762 E3035.05721 Buffered code: G1 X62.188 Y247.5 E3035.0682 Buffered code: G1 X62.552 Y247.395 E3035.07778 Buffered code: G1 X198.934 Y247.617 E3038.52521 Buffered code: G1 X198.941 Y243.093 E3038.63957 Buffered code: G0 X199.342 Y242.692 Buffered code: G1 X62.565 Y242.687 E3042.09697 Buffered code: G1 X62.245 Y242.554 E3042.10573 Buffered code: G1 X62.046 Y242.214 E3042.11569 Buffered code: G1 X62.047 Y74.761 E3046.34852 Buffered code: G1 X62.239 Y74.426 E3046.35828 Buffered code: G1 X62.538 Y74.293 E3046.36655 Buffered code: G1 X199.625 Y74.289 E3049.8318 Buffered code: G1 X199.634 Y68.962 E3049.96645 Buffered code: G1 X62.54 Y69.183 E3053.43188 Buffered code: G1 X62.246 Y69.047 E3053.44006 Buffered code: G1 X62.051 Y68.714 E3053.44982 Buffered code: G1 X62.042 Y65.44 E3053.53258 Buffered code: G1 X56.388 Y65.44 E3053.6755 Buffered code: G1 X56.389 Y251.539 E3058.37965 Buffered code: G1 X62.042 Y251.539 E3058.52255 Buffered codes: 1528 bytes total Code buffer space: 2552 Configured SPI speed: 8000000Hz, TfrRdy pin glitches: 0 Full transfers per second: 44.49, max time between full transfers: 70.6ms, max pin wait times: 68.4ms/6.4ms Codes per second: 53.34 Maximum length of RX/TX data transfers: 4604/2280I can't get this thing to now finish a print job.