Post heading:
Firmware Name: RepRapFirmware for Duet 2 WiFi/Ethernet
Firmware Electronics: Duet Ethernet 1.02 or later
Firmware Version: 2.04RC1 (2019-07-14b1)
Web Interface Version: 1.22.6
CoreXY_UV, ZZ (Nema 23,23_34,17, 34,34)
E3D Supervulcano 2.85- 1.4 nozzle
E3D Supervulcano 1.75- 1.0 nozzle
2x Bondtech QR
XYU closed loop
XYZU ;EXTERNAL drivers on expansion breakout board v1.1
Printer is working fine, so we would like to add the laser filament monitor to do the measuring
of the intended extrusion;
We would like to create data with a simple program for the M592 D0 A? B?
and M592 D1 A? B? command.
So we found the following code on the forum and added the M591 comment.
M117 Start Extrusion Measurement.
G1 X0 Y430 F6000
M83
G1 X100 E25 F60
M400
M591 D0; show measurement??
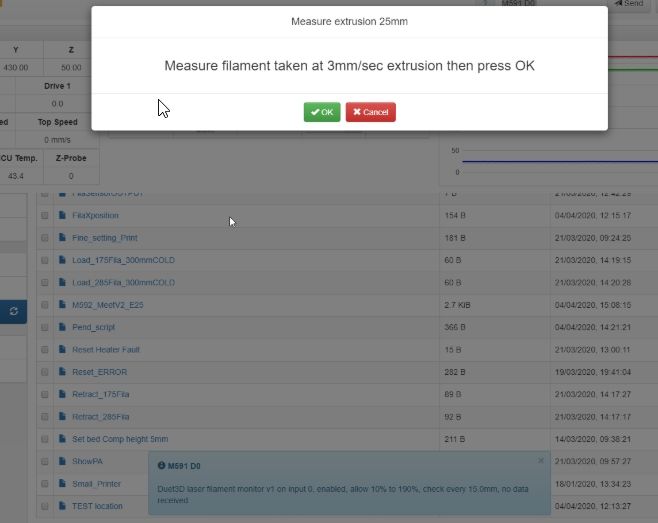
M291 S3 R"Measure extrusion 25mm" P"Measure filament taken at 1mm/sec extrusion then press OK"
But no success.
Change R% and E values in the M591..
The final answer is no data received.
My original setup in the config file;
M591 D0 P5 C"e0_stop" R40:120 E3.0 S1 A1
; Duet3D laser sensor for extruder drive 0, connected to endstop input (E0), tolerance 40 to 120%, 3mm comparison ;length, enabled, check all Ext. motion
M591 D1 P5 C"e1_stop" R40:120 E3.0 S1 A1
; Duet3D laser sensor for extruder drive 0, connected to endstop input (E0), tolerance 40 to 120%, 3mm comparison ;length, enabled, check all Ext. motion
So D0 is used for extruder0 =2.85mm
And D1 for extruder1 =1.75mm
Switching them on;
With a working simplify3d printing code, results with a few seconds to a pause and "too little movement"