Duet3 6CH + 3CH expansion board - Missing steps.
-
@evomotors Let's just see if it makes a difference at all.
The default jerk policy is 0, which replicates the behaviour of earlier versions of RRF (jerk is only applied between two printing moves, or between two travel moves, and only if they both involve XY movement or neither does). Changing the jerk policy to 1 allows jerk to be applied between any pair of moves.
-
@Phaedrux said in Duet3 6CH + 3CH expansion board - Missing steps.:
@evomotors Let's just see if it makes a difference at all.
The default jerk policy is 0, which replicates the behaviour of earlier versions of RRF (jerk is only applied between two printing moves, or between two travel moves, and only if they both involve XY movement or neither does). Changing the jerk policy to 1 allows jerk to be applied between any pair of moves.
Did test with following config changes.
M566 X500.00 Y500.00 Z50.00 E3000.00 P1Failed the same way
-
Thanks for testing.
-
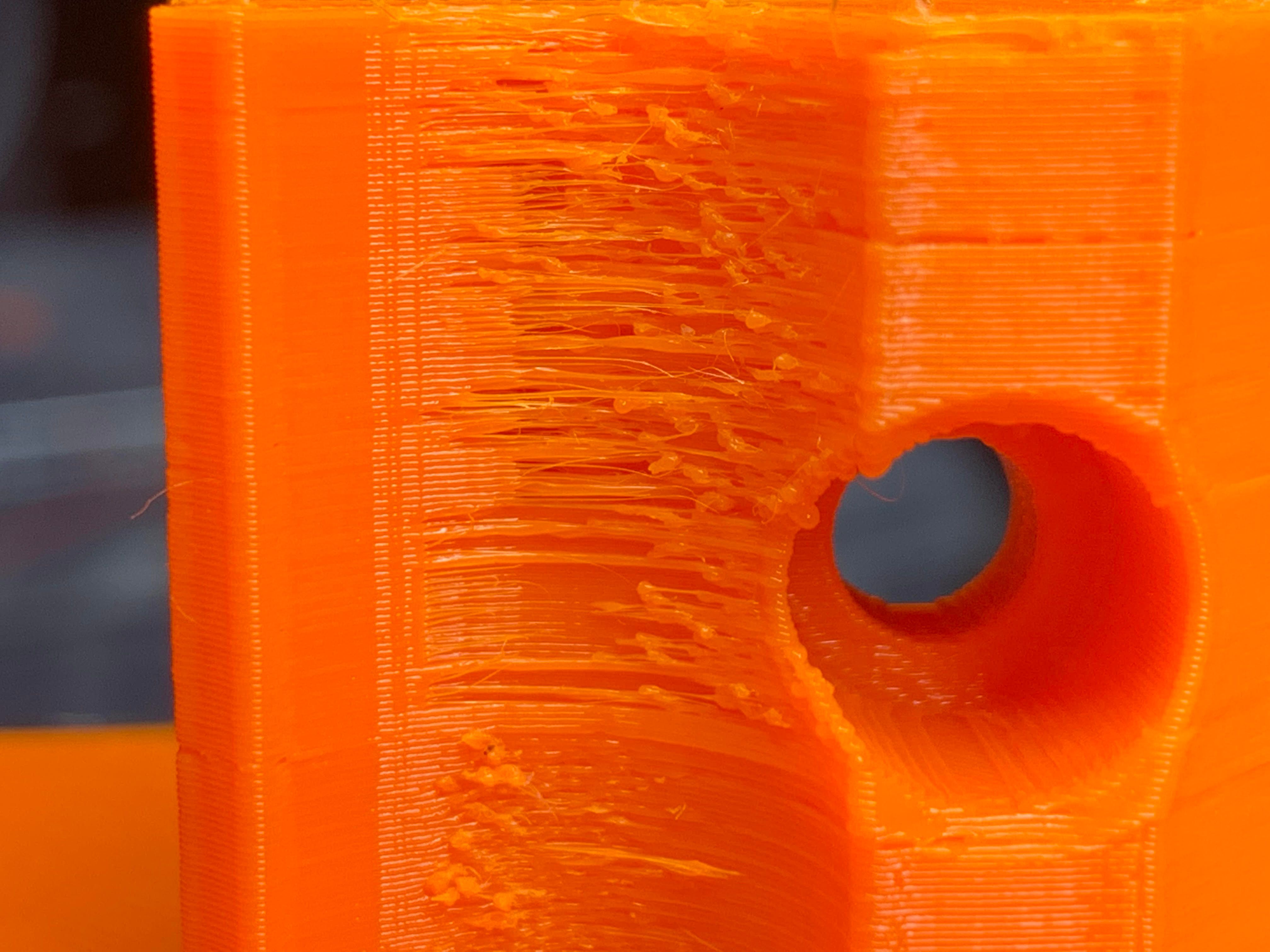
Not trying to hijack the thread but I got "similar" issues on a 6HC + Toolboard running 3.2
I only see the issue on round surfaces on which there are no retractions (set at 0.2) and PA from the ~middle of the hole was set from 0.005 to 0 which made it worse?!
A previous print with bigger retraction 0.3 and bigger PA 0.02 had issues but not of this magnitude, which is curious.I can start a new thread with all the info if necessary.

-
@jbarros said in Duet3 6CH + 3CH expansion board - Missing steps.:
I can start a new thread with all the info if necessary.
Please do.
-
@evomotors
are you 100% sure that its "data loss" causing the issue ?
it seems you set everything correctly (i'm far from being expert...) maybe the board ignores your current limit settings .
can you try running the same gcode (or simple high accel macro) while the motors disconnected from the load (remove belts) ?
i'm not sure its a comm speed issue . maybe the tboard simply ignores motor current settings . -
@hackinistrator said in Duet3 6CH + 3CH expansion board - Missing steps.:
@evomotors
are you 100% sure that its "data loss" causing the issue ?
it seems you set everything correctly (i'm far from being expert...) maybe the board ignores your current limit settings .
can you try running the same gcode (or simple high accel macro) while the motors disconnected from the load (remove belts) ?
i'm not sure its a comm speed issue . maybe the tboard simply ignores motor current settings .I'm not 100% sure that it's caused by data loss. If I set my motors current limits correctly it should not ignore them, unless there is a bug in the firmware.
I prefer not to remove belts, but even if I do, what it is going to prove? How can you tell if gantry in the correct position if belts are disconnected?
But you maybe correct, it does feels like motors ether underpowered or pulses are irregular on these fast moves. Unfortunately there is no way for me to tell, I don't have oscilloscope on hands. But it should be really easy for @dc42 to test.
I'm still waiting for @dc42 to look at the videos and reply.
-
@hackinistrator Have you watched the videos that @evomotors posted? If the board ignores the motor current, then it does so selectively at some seemingly random time after a print starts, then restores it again immediately after.
-
I'm getting lonely here after proving existence of the issue.

@dc42 Do you want me to perform some additional tests?
-
Thanks for your patience. He's aware and will respond ASAP.
-
@Phaedrux said in Duet3 6CH + 3CH expansion board - Missing steps.:
Thanks for your patience. He's aware and will respond ASAP.
Oh thanks! The good news that I'm not alone here.
-
@evomotors For want of anything better to say or suggest, have you tried commenting out the M593 (DAA) to see if that makes any difference? No reason for suggesting it other than it's something which modifies motion planning, which might get applied to main boards but not expansion boards. I don't know if that's even possible but testing without M593 would at least eliminate it as a potential cause. Just a thought if you've got nothing better to do while you are waiting...........
-
@evomotors, I believe at least some of these issues are caused by CAN clock sync jitter, meaning that the expansion board clocks don't run perfectly in sync either the main board. When I measured it, I found that it was higher than I expected, frequently reaching 300us and sometimes more under conditions of high step rates and short move segments. Fortunately we've had a plan to reduce this jitter ever since we designed Duet 3. I've been working on this all day, and the jitter is now reduced to 13us even with heavy traffic. There is the possibility to reduce it still further.
I have two other related issues to investigate before we release an early 3.3 beta.
-
@deckingman sure , i watched the vid.
i'm not sure if the issue occurs at random time.
if you check the vid , you can see the printer completed pretty fast accel moves without issues while moving on XY plane .
the issue occurred when it was making fast diagonal move - single motor running .
what is the default motor current on those drivers anyways ?
maybe its a good idea to try and reduce motor current on exp. board to very low value and see if it has any effect .
there are no CAN errors so i don't see how it can be comm. error . -
@hackinistrator there is some timing jitter (as @dc42 has pointed out) that is not currently reported in 3.2.
@evomotors thanks for all the work in detailing the problem, we are working on it!
-
-
I am pleased to report that we have made substantial progress on this issue. In addition to fixing the CAN clock jitter, we have identified and fixed an issue that could cause whole moves to be abandoned on CAN-connected expansion boards. We have only been able to reproduce this using high step rates and short moves, however the cause of the issue (floating point rounding error) could conceivably happen at lower step rates too.
I expect to provide unofficial 3.3beta versions of all firmwares tomorrow.
-
@dc42 Holy crap! Big if true!!!!!! I can't wait to try out the firmware to see if it solves my issues!
-
@dc42
Do you need a beta tester?")
-
@evomotors said in Duet3 6CH + 3CH expansion board - Missing steps.:
Do you need a beta tester?
always welcome.
the firmware will be available for all here
https://github.com/Duet3D/RepRapFirmware/releases