Stepper motor problem Duet 3 MB6HC
-
@phaedrux I did it right. I've searched the tutorials and I'm out of ideas what's wrong here.
-
@kkallas, how are you trying to move the axes? By default, the firmware does not allow normal axis moves are not allowed until the printer has been homed. So for testing the motors, try commands like this:
G91
G1 H2 X10
G1 H2 X-10
G1 H2 Y10
G1 H2 Y-10Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42 I use the function < M564 S0H0 > and then <G1 H2 X100 >.
I shortened the cables - thought maybe there was something wrong with them.
I installed system version 3.2.2 because the default 3.3.3 was a beta.
The motor when connected to the lab power supply each coil jumps a step but when connected to MB6HC nothing happens, it doesn't move or lock.
By measuring the pins on the board it gets:
DRIVER_0_B1 is connected to DRIVER_0_B2
DRIVER_0_A1 is connected to DRIVER_0_A2When the motor should be running I do not see any voltage on the outputs from the board. Should I select DC or AC on the multimeter? Is there any easy way to check if the controller is faulty?
What does <M122> diagnostics mean with "ok" controllers?M122 === Diagnostics === RepRapFirmware for Duet 3 MB6HC version 3.2.2 running on Duet 3 MB6HC v0.6 or 1.0 (standalone mode) Board ID: 08DJM-956L2-G43S4-6J1DJ-3SJ6N-986LG Used output buffers: 1 of 40 (20 max) === RTOS === Static ram: 149788 Dynamic ram: 92180 of which 504 recycled Never used RAM 116360, free system stack 164 words Tasks: NETWORK(ready,211) ETHERNET(blocked,110) HEAT(blocked,356) CanReceiv(blocked,927) CanSender(blocked,371) CanClock(blocked,351) TMC(blocked,51) MAIN(running,1117) IDLE(ready,19) Owned mutexes: === Platform === Last reset 00:22:18 ago, cause: power up Last software reset at 2021-04-02 19:05, reason: User, GCodes spinning, available RAM 116360, slot 1 Software reset code 0x0003 HFSR 0x00000000 CFSR 0x00000000 ICSR 0x00400000 BFAR 0x00000000 SP 0x00000000 Task MAIN Freestk 0 n/a Error status: 0x00 Aux0 errors 0,0,0 Aux1 errors 0,0,0 MCU temperature: min 40.7, current 41.3, max 41.5 Supply voltage: min 23.9, current 24.0, max 24.0, under voltage events: 0, over voltage events: 0, power good: yes 12V rail voltage: min 12.0, current 12.1, max 12.2, under voltage events: 0 Driver 0: position 30000, ok, reads 48285, writes 0 timeouts 0, SG min/max 0/0 Driver 1: position 0, ok, reads 48286, writes 0 timeouts 0, SG min/max 9/9 Driver 2: position 0, ok, reads 48285, writes 0 timeouts 0, SG min/max 9/9 Driver 3: position 0, ok, reads 48285, writes 0 timeouts 0, SG min/max 9/9 Driver 4: position 0, ok, reads 48285, writes 0 timeouts 0, SG min/max 9/9 Driver 5: position 0, ok, reads 48285, writes 0 timeouts 0, SG min/max 9/9 Date/time: 2021-04-02 20:37:45 Slowest loop: 4.32ms; fastest: 0.05ms === Storage === Free file entries: 10 SD card 0 detected, interface speed: 25.0MBytes/sec SD card longest read time 2.4ms, write time 0.0ms, max retries 0 === Move === DMs created 125, maxWait 0ms, bed compensation in use: none, comp offset 0.000 === MainDDARing === Scheduled moves 3, completed moves 3, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1 === AuxDDARing === Scheduled moves 0, completed moves 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1 === Heat === Bed heaters = -1 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1, chamberHeaters = -1 -1 -1 -1 === GCodes === Segments left: 0 Movement lock held by null HTTP is idle in state(s) 0 Telnet is idle in state(s) 0 File is idle in state(s) 0 USB is idle in state(s) 0 Aux is idle in state(s) 0 Trigger is idle in state(s) 0 Queue is idle in state(s) 0 LCD is idle in state(s) 0 SBC is idle in state(s) 0 Daemon is idle in state(s) 0 Aux2 is idle in state(s) 0 Autopause is idle in state(s) 0 Code queue is empty. === Network === Slowest loop: 7.53ms; fastest: 0.02ms Responder states: HTTP(0) HTTP(0) HTTP(0) HTTP(0) HTTP(0) HTTP(0) FTP(0) Telnet(0), 0 sessions Telnet(0), 0 sessions HTTP sessions: 2 of 8 - Ethernet - State: active Error counts: 0 0 0 0 0 Socket states: 2 2 2 2 2 0 0 0 === CAN === Messages queued 0, send timeouts 2703, received 0, lost 0, longest wait 0ms for reply type 0, free buffers 48 -
Is the motor connected in that photo? It looks like the endstop is connected to the motor? The bottom is cut off but it looks like the white ribbon from the endstop is going to the motor. The motor cable is hanging disconnected. Maybe the photo doesn't show the actual current state of wiring. Can you maybe post some more photos?
-
@phaedrux No, the motor was not connected in that photo. I removed one and the circuit currently looks like this. The motors use the same ribbons as the endstops. I thought the ribbon might be the problem which is why the cables are so shortened. I would like to not use the endstops but rather use sensor less homing so I did not connect them. Could this be the problem?

-
@kkallas said in Stepper motor problem Duet 3 MB6HC:
so I did not connect them. Could this be the problem?
No, if you were sending G1 H2 commands the motors are sent movement commands even if they are not homed.
Do you have any other motors to test with? Are you sure the motors are working? Replacing the motors might be the easiest approach since you could get motors to your own specifications.
https://duet3d.dozuki.com/Wiki/Choosing_and_connecting_stepper_motors
-
I bought this stepper motor. Still nothing is moving. Maybe all the motors should be connected. I have no idea what to do anymore. In my opinion the MB6HC is not sending, any signals to the motors. Multimeter shows no voltage, motors don't heat up, how to check if the board is damaged?
Maybe there is a simple gcode that checks the controllers and motors?

-
If no motor is connected and you try and move the motor you should get some errors in the console. Are you getting any errors?
What current does the new motor require and has it been set in config.g?
What command are you sending to move it?
-
@phaedrux Can you send us the pinout for the stepper motor you are using?
These pins do not look like they are properly inserted into the connector.
Usually, none of the metal is showing when they are inserted.

-
@phaedrux When the motors are not connected and I want to move them no errors are displayed.The current for this motor is 1.7A.
M906 X1700 Y800 Z800 ; set motor currents (mA)I try to start the engine with the command:
M564 S0H0 G91 G1 H2 X100@alankilian I know this is just for a test rewired connectors.
-
@kkallas Can you send us the pinout for the stepper motor you are using?
-
@kkallas Can you unplug the connector from the Det and tell us the resistance between Green and Black and the resistance between Blue and Red?
That will tell us that you have the correct wires for the stepper-motor coils going to the correct pins on the Duet.
It's pretty easy to get something wrong when wiring a stepper.
-
@alankilian its 4 ohms for green and black, and 4 ohms for blue and red
-
@kkallas Great!
That verifies that you have the correct wires connected to the driver.
I'm not sure why you are continuing to have problems.
I don't have one of these boards, so I'm just trying to help in other ways. -
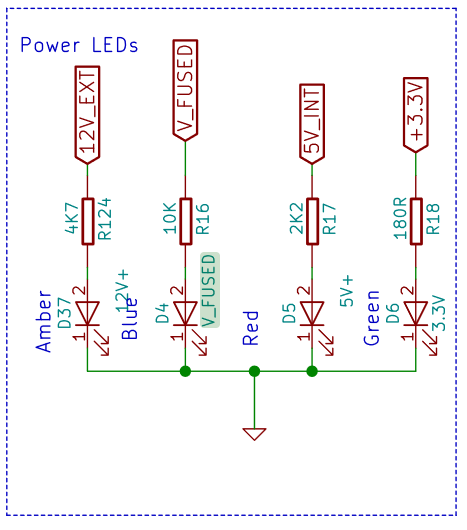
@kkallas Are all four of your LEDs lit?
-
Can you try a different motor port and confirm that the plugs are actually making good contact with the pins?
-
@phaedrux The pins are in contact with the motor. I checked with a multimeter on the underside.
It doesn't work on other ports either.@alankilian All diodes are lit.
Are the components marked in yellow not broken because they look a little different than the ones next to them (red)



-
@kkallas The capacitors on my 6HC look the same as yours, and it works, so I don't think that's the issue. Thought the V_FUSED LED is on, can you check the 15A fuse anyway? You should get an undervoltage message usually, if you try to move a motor when the driver isn't powered.
When you send a move command, does Status panel in the DWC dashboard report that the motor position has moved by the requested amount?
Do you have insulated washer under the screw heads of the mounting screws? They are very large! They probably aren't shorting anything out, but might be worth trying with everything disconnected but the Ethernet, motor and VIN, and with those screws out.
Ian
Bed-slinger - Mini5+ WiFi/1LC | RRP Fisher v1 - D2 WiFi | Polargraph - D2 WiFi | TronXY X5S - 6HC/Roto | CNC router - 6HC | Tractus3D T1250 - D2 Eth
-
@droftarts
Fuses are ok.When I manually move the engines no message appears.
Yes, the DWC shows the motor position incremented by the desired value but the motor does not move at all.
I disconnected everything except power supply, stepper motor and power cable - still nothing.


-
@kkallas I really can’t see anything that would stop the motor moving. Seems like an SPI failure (@dc42)? When and where did you buy the board from?
Ian
Bed-slinger - Mini5+ WiFi/1LC | RRP Fisher v1 - D2 WiFi | Polargraph - D2 WiFi | TronXY X5S - 6HC/Roto | CNC router - 6HC | Tractus3D T1250 - D2 Eth