Stepper motor problem Duet 3 MB6HC
-
If no motor is connected and you try and move the motor you should get some errors in the console. Are you getting any errors?
What current does the new motor require and has it been set in config.g?
What command are you sending to move it?
-
@phaedrux Can you send us the pinout for the stepper motor you are using?
These pins do not look like they are properly inserted into the connector.
Usually, none of the metal is showing when they are inserted.

-
@phaedrux When the motors are not connected and I want to move them no errors are displayed.The current for this motor is 1.7A.
M906 X1700 Y800 Z800 ; set motor currents (mA)I try to start the engine with the command:
M564 S0H0 G91 G1 H2 X100@alankilian I know this is just for a test rewired connectors.
-
@kkallas Can you send us the pinout for the stepper motor you are using?
-
@kkallas Can you unplug the connector from the Det and tell us the resistance between Green and Black and the resistance between Blue and Red?
That will tell us that you have the correct wires for the stepper-motor coils going to the correct pins on the Duet.
It's pretty easy to get something wrong when wiring a stepper.
-
@alankilian its 4 ohms for green and black, and 4 ohms for blue and red
-
@kkallas Great!
That verifies that you have the correct wires connected to the driver.
I'm not sure why you are continuing to have problems.
I don't have one of these boards, so I'm just trying to help in other ways. -
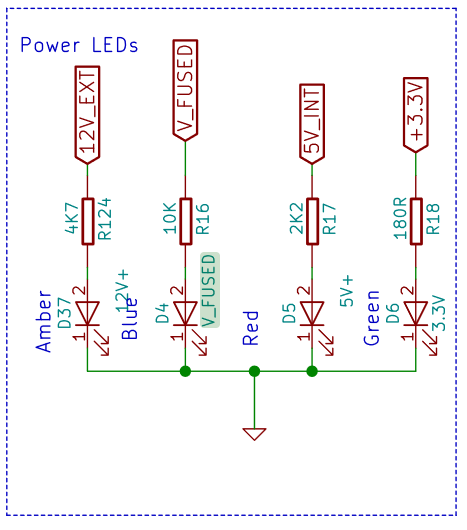
@kkallas Are all four of your LEDs lit?
-
Can you try a different motor port and confirm that the plugs are actually making good contact with the pins?
-
@phaedrux The pins are in contact with the motor. I checked with a multimeter on the underside.
It doesn't work on other ports either.@alankilian All diodes are lit.
Are the components marked in yellow not broken because they look a little different than the ones next to them (red)



-
@kkallas The capacitors on my 6HC look the same as yours, and it works, so I don't think that's the issue. Thought the V_FUSED LED is on, can you check the 15A fuse anyway? You should get an undervoltage message usually, if you try to move a motor when the driver isn't powered.
When you send a move command, does Status panel in the DWC dashboard report that the motor position has moved by the requested amount?
Do you have insulated washer under the screw heads of the mounting screws? They are very large! They probably aren't shorting anything out, but might be worth trying with everything disconnected but the Ethernet, motor and VIN, and with those screws out.
Ian
Bed-slinger - Mini5+ WiFi/1LC | RRP Fisher v1 - D2 WiFi | Polargraph - D2 WiFi | TronXY X5S - 6HC/Roto | CNC router - 6HC | Tractus3D T1250 - D2 Eth
-
@droftarts
Fuses are ok.When I manually move the engines no message appears.
Yes, the DWC shows the motor position incremented by the desired value but the motor does not move at all.
I disconnected everything except power supply, stepper motor and power cable - still nothing.


-
@kkallas I really can’t see anything that would stop the motor moving. Seems like an SPI failure (@dc42)? When and where did you buy the board from?
Ian
Bed-slinger - Mini5+ WiFi/1LC | RRP Fisher v1 - D2 WiFi | Polargraph - D2 WiFi | TronXY X5S - 6HC/Roto | CNC router - 6HC | Tractus3D T1250 - D2 Eth
-
@droftarts
I bought the plate on March 31 from my local retailer. I was very satisfied because the only reseller in Poland is a few hundred meters from me and is on the Duet3D listMaybe it' s possible to check SPI through RaspberryPi ports, I have several Pi Zero. @dc42
-
Have you tried configuring each driver and moving the motor for testing?
-
@phaedrux Yes. Yesterday I also tried to move the steppers with arduino with motor shield and they work.
-
Very strange. Please contact your vendor and initiate a warranty exchange. Include a link to this thread as authorization.